Você também pode gostar
- Os Processos Industriais Podem DividirDocumento15 páginasOs Processos Industriais Podem DividirPraxedes FilhoAinda não há avaliações
- Instrumentação: medição e controle de variáveis em processos industriaisDocumento120 páginasInstrumentação: medição e controle de variáveis em processos industriaisHilton SeheresAinda não há avaliações
- Resumo Teórico Eletrônica AplicadaDocumento41 páginasResumo Teórico Eletrônica AplicadaJFCAinda não há avaliações
- Controle de Processos: Malhas, Instrumentos e TelemetriaDocumento5 páginasControle de Processos: Malhas, Instrumentos e TelemetriaJuliano MachadoAinda não há avaliações
- Medição e Erro: Fundamentos da MetrologiaDocumento64 páginasMedição e Erro: Fundamentos da Metrologiatandre111Ainda não há avaliações
- Tema 1 ResumoDocumento9 páginasTema 1 ResumoAnderson CarvalhoAinda não há avaliações
- Instrumentação de controle e mediçãoDocumento117 páginasInstrumentação de controle e mediçãoRicardo AmenAinda não há avaliações
- Incerteza Medicao e Ajuste de DadosDocumento24 páginasIncerteza Medicao e Ajuste de DadosHumberto Costa100% (6)
- Instrumentos de medição essenciais para controle de processos industriaisDocumento24 páginasInstrumentos de medição essenciais para controle de processos industriaiszasyyAinda não há avaliações
- Condicionamento de Sinais AnalógicosDocumento23 páginasCondicionamento de Sinais AnalógicosDaniel FonsecaAinda não há avaliações
- Características dos Instrumentos de MediçãoDocumento4 páginasCaracterísticas dos Instrumentos de MediçãodanillogcAinda não há avaliações
- Conceitos básicos de instrumentação industrialDocumento39 páginasConceitos básicos de instrumentação industrialnelmaralAinda não há avaliações
- Instrumentação Industrial 2 TerminologiaDocumento22 páginasInstrumentação Industrial 2 TerminologiaAnanda LagoAinda não há avaliações
- PMR3301-aula9 - SensoresDocumento36 páginasPMR3301-aula9 - Sensorespaulo soaresAinda não há avaliações
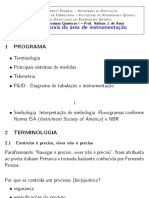
- Controle de Processos Químicos I - Aspectos gerais da área de instrumentaçãoDocumento74 páginasControle de Processos Químicos I - Aspectos gerais da área de instrumentaçãoAdilson J. de AssisAinda não há avaliações
- 01 - Abraman Introducao PDFDocumento38 páginas01 - Abraman Introducao PDFCiidaaAinda não há avaliações
- SensoresDocumento21 páginasSensoresjsasistemasAinda não há avaliações
- Conceitos básicos de metrologiaDocumento4 páginasConceitos básicos de metrologiaEliazar GuilicheAinda não há avaliações
- Introdução à Instrumentação BásicaDocumento26 páginasIntrodução à Instrumentação BásicaJames Martins ParreiraAinda não há avaliações
- Instrument A CaoDocumento16 páginasInstrument A CaoArari Luís GregórioAinda não há avaliações
- Aula 2a - Sistemas de MediçãoDocumento56 páginasAula 2a - Sistemas de MediçãoLuisa VogadoAinda não há avaliações
- Introdução À InstrumentaçãoDocumento96 páginasIntrodução À Instrumentaçãojdsa123Ainda não há avaliações
- RAFA JOB (Recuperado Automaticamente)Documento9 páginasRAFA JOB (Recuperado Automaticamente)FATIMA RAMOSAinda não há avaliações
- Instrumentos de medição e classificação em sistemas de controle industrialDocumento8 páginasInstrumentos de medição e classificação em sistemas de controle industrialMarcos SilvaAinda não há avaliações
- CNC Componentes EletronicosDocumento41 páginasCNC Componentes EletronicosAri Ercilio Farias FereirraAinda não há avaliações
- Calibração de transmissores de pressãoDocumento13 páginasCalibração de transmissores de pressãoDaniel CavalcanteAinda não há avaliações
- 284995-Apostila de InstrumentacaoDocumento40 páginas284995-Apostila de InstrumentacaoClovis SorocabaAinda não há avaliações
- Medidas Eletricas 02Documento11 páginasMedidas Eletricas 02willianamaral0% (1)
- Instrumentação e ControleDocumento12 páginasInstrumentação e ControleJefferson BrittoAinda não há avaliações
- Medição de grandezas elétricasDocumento15 páginasMedição de grandezas elétricaspaulovalorAinda não há avaliações
- Características sensores automação industrialDocumento8 páginasCaracterísticas sensores automação industrialRoseli DefassioAinda não há avaliações
- Medição e MetrologiaDocumento9 páginasMedição e MetrologiaGilberto MoreiraAinda não há avaliações
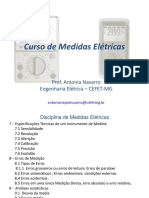
- Medições Elétricas: Especificações TécnicasDocumento63 páginasMedições Elétricas: Especificações TécnicasCEFET TurmaAinda não há avaliações
- Instrumentos de Medidas ElétricasDocumento32 páginasInstrumentos de Medidas ElétricasCarlos Henrique MonteiroAinda não há avaliações
- Medidas Elétricas - Aula 01Documento19 páginasMedidas Elétricas - Aula 01Mario LacerdaAinda não há avaliações
- Medição de grandezas físicas com instrumentosDocumento30 páginasMedição de grandezas físicas com instrumentosRuan Henrique ColomboAinda não há avaliações
- Calibração transdutor pressãoDocumento20 páginasCalibração transdutor pressãozeoliveira22Ainda não há avaliações
- Tema 1 Resumo - 1Documento3 páginasTema 1 Resumo - 1zmoisesbritoAinda não há avaliações
- Curso básico de metrologia dimensionalDocumento15 páginasCurso básico de metrologia dimensionalcenataliAinda não há avaliações
- 2.11.ET.Caracterização estática de InstrumentosDocumento7 páginas2.11.ET.Caracterização estática de InstrumentosArivaldo BispoAinda não há avaliações
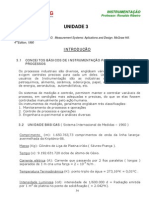
- Unidade 3 Livro Measurements DoebelinDocumento33 páginasUnidade 3 Livro Measurements DoebelinÉrico CarneiroAinda não há avaliações
- Sistemas de Controle 1 - Material EaD - Capítulo 3Documento40 páginasSistemas de Controle 1 - Material EaD - Capítulo 3carlos arthurAinda não há avaliações
- Medição de variáveis industriaisDocumento71 páginasMedição de variáveis industriaisSérgio Cardoso de OliveiraAinda não há avaliações
- Instrumentação Industrial SamarDocumento18 páginasInstrumentação Industrial SamarLuciano MagalhãesAinda não há avaliações
- 1.a Aula - CDG - Variáveis de Processo - IntroduçãoDocumento34 páginas1.a Aula - CDG - Variáveis de Processo - IntroduçãoRene LealAinda não há avaliações
- Lista de Exercicios PropostosDocumento5 páginasLista de Exercicios PropostosYuri Machado RodriguesAinda não há avaliações
- Instrumentação Industrial - TerminologiaDocumento14 páginasInstrumentação Industrial - TerminologiaJohnata França100% (4)
- INSTRUMENTAÇÃODocumento4 páginasINSTRUMENTAÇÃOKaio SodréAinda não há avaliações
- FLUXOGRAMADocumento41 páginasFLUXOGRAMACristiano da Silva VieiraAinda não há avaliações
- Características Dos Instrumentos de MediçãoDocumento42 páginasCaracterísticas Dos Instrumentos de MediçãoGABRIELA VIEIRA LIMAAinda não há avaliações
- Doq Cgcre 17 - 02Documento14 páginasDoq Cgcre 17 - 02Daniel AlvesAinda não há avaliações
- Analise Sistema Medição - R&R CurtoDocumento7 páginasAnalise Sistema Medição - R&R CurtoFernando BarrosAinda não há avaliações
- Introdução à instrumentação industrialDocumento20 páginasIntrodução à instrumentação industrialPaula Gonçalves de SouzaAinda não há avaliações
- Sistemas de medição e seus elementos funcionaisDocumento14 páginasSistemas de medição e seus elementos funcionaisFabrício Tomaz JamaicaAinda não há avaliações
- Controle DigitalNo EverandControle DigitalAinda não há avaliações
- Fórmulas e Cálculos Para Eletricidade e Eletrônica - volume 2No EverandFórmulas e Cálculos Para Eletricidade e Eletrônica - volume 2Nota: 3.5 de 5 estrelas3.5/5 (2)
- ANÁLISE DE SISTEMAS CONTROLEDocumento25 páginasANÁLISE DE SISTEMAS CONTROLEEdgar ReisAinda não há avaliações
- Aula01 - Função de TransferênciaDocumento72 páginasAula01 - Função de TransferênciaJonas Souza VasconcelosAinda não há avaliações
- Reaquecimento de vapor aumenta eficiência de ciclo termelétricoDocumento4 páginasReaquecimento de vapor aumenta eficiência de ciclo termelétricoCésar Roberto Nascimento GuimarãesAinda não há avaliações
- Modelagem e Análise de Sistemas DinâmicosDocumento113 páginasModelagem e Análise de Sistemas DinâmicosJoel AlvesAinda não há avaliações
- Aula - Nise - Cap2 CONTROLE LINEARDocumento56 páginasAula - Nise - Cap2 CONTROLE LINEARLucas RodriguesAinda não há avaliações
- 3 - Aula Filtros Ativos PDFDocumento34 páginas3 - Aula Filtros Ativos PDFWilliam Soares Alves100% (1)
- Projeto PI para motor-tacogeradorDocumento11 páginasProjeto PI para motor-tacogeradorThyago FreitasAinda não há avaliações
- O Software Livre Scilab Aplicado Na Simulação e Controle de Sistemas Dinâmicos Representados No Espaço de Estados PDFDocumento68 páginasO Software Livre Scilab Aplicado Na Simulação e Controle de Sistemas Dinâmicos Representados No Espaço de Estados PDFferacity100% (1)
- Controle de Processos IndustriaisDocumento67 páginasControle de Processos IndustriaisCamila SivieroAinda não há avaliações
- Relatório de Controle Discreto Método de Ziegler NicholsDocumento10 páginasRelatório de Controle Discreto Método de Ziegler NicholsDiego VinhaAinda não há avaliações
- Conceitos básicos de Controle de ProcessosDocumento15 páginasConceitos básicos de Controle de ProcessosAlessandro JesusAinda não há avaliações
- Analise de Sistemas No Dominio de FrequenciaDocumento6 páginasAnalise de Sistemas No Dominio de FrequenciaRedação PaxAinda não há avaliações
- Lista 01 de Exercícios - Malhas Fechada e Malha Aberta PDFDocumento3 páginasLista 01 de Exercícios - Malhas Fechada e Malha Aberta PDFNatercia Miranda100% (1)
- 5.a Aula - Sist. Lineares - Funcao de TransferenciaDocumento49 páginas5.a Aula - Sist. Lineares - Funcao de TransferenciaMarcelo DantasAinda não há avaliações
- Controle Analógico - Lista - de - Exercicios - IDocumento7 páginasControle Analógico - Lista - de - Exercicios - IClemilson MirelesAinda não há avaliações
- Pólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosDocumento29 páginasPólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosLameseMecatronicaAinda não há avaliações
- Filtros ativos PBDocumento10 páginasFiltros ativos PBNátali SchmidtAinda não há avaliações
- Slides ControleDocumento70 páginasSlides ControleÍcaro VianaAinda não há avaliações
- Sistemas Automatizados de Controle AutomáticoDocumento35 páginasSistemas Automatizados de Controle AutomáticoMoyra B SantosAinda não há avaliações
- Modelos de sistemas dinâmicosDocumento20 páginasModelos de sistemas dinâmicosRodolfo GuerreiroAinda não há avaliações
- Aula - Cap6 - v221101 - Controle MF - Parte 1 - Controle PDocumento81 páginasAula - Cap6 - v221101 - Controle MF - Parte 1 - Controle Prenatoalex.17Ainda não há avaliações
- Relatório - Exp2 - Frequências Próprias Complexas - Circuitos Elétricos 2 - Trim3.3Documento12 páginasRelatório - Exp2 - Frequências Próprias Complexas - Circuitos Elétricos 2 - Trim3.3Fernando Henrique G. Zucatelli100% (2)
- ASD - Tema 2 - Modelagem No Domínio Da Frequência PDFDocumento67 páginasASD - Tema 2 - Modelagem No Domínio Da Frequência PDFJoão de MarcosAinda não há avaliações
- Avaliação 02 - G3Documento5 páginasAvaliação 02 - G3Arthurus CaesarAinda não há avaliações
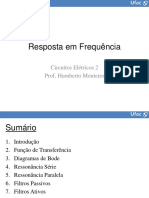
- Circuitos Elétricos Resposta em FrequênciaDocumento101 páginasCircuitos Elétricos Resposta em FrequênciaRafael BastosAinda não há avaliações
- Sistemas 1a ordem: equações, respostas & exemplosDocumento28 páginasSistemas 1a ordem: equações, respostas & exemplosbersilveira8645Ainda não há avaliações