Você também pode gostar
- MODULO 02 - Projeto Bravo Mike - CinematicaDocumento33 páginasMODULO 02 - Projeto Bravo Mike - CinematicaPaulo RenanAinda não há avaliações
- Turmadefevereiro Física1 Vetores 06-04-2022Documento18 páginasTurmadefevereiro Física1 Vetores 06-04-2022Camilla RequiãoAinda não há avaliações
- Força e VetoresDocumento29 páginasForça e Vetoresjonathan coutinhoAinda não há avaliações
- Grandezas físicas escalares e vetoriaisDocumento19 páginasGrandezas físicas escalares e vetoriaisulisses7100% (1)
- Fisica Do Corpo HumanoDocumento70 páginasFisica Do Corpo HumanoAdeno Oliveira100% (1)
- FSC - AP5 - Introdução À Física - Vetores PDFDocumento4 páginasFSC - AP5 - Introdução À Física - Vetores PDFKurama YudiAinda não há avaliações
- 57918_-_01Documento14 páginas57918_-_01ricardohosana.esefAinda não há avaliações
- Vetores: decomposição, soma e subtraçãoDocumento19 páginasVetores: decomposição, soma e subtraçãoMário RomanoAinda não há avaliações
- Vetores na Engenharia CivilDocumento33 páginasVetores na Engenharia Civilrafaeledson0% (1)
- Grandezas escalares e vetoriais: conceitos e operações básicasDocumento36 páginasGrandezas escalares e vetoriais: conceitos e operações básicasRoberto Alves0% (1)
- 6781-5 - Introdução - VetoresDocumento4 páginas6781-5 - Introdução - VetoresGustavoAinda não há avaliações
- 02 - Vetores 2019.1Documento101 páginas02 - Vetores 2019.1Leonardo RibeiroAinda não há avaliações
- Vetores: conceitos básicosDocumento15 páginasVetores: conceitos básicosCarlos BustamanteAinda não há avaliações
- Biomecânica das Forças no Corpo HumanoDocumento75 páginasBiomecânica das Forças no Corpo HumanoFernanda ElisaAinda não há avaliações
- Documento 5Documento7 páginasDocumento 5joaogabrielbeaubernardAinda não há avaliações
- Cap. 3 (Introdução A Vetores, Movimento em 2D e 3D)Documento52 páginasCap. 3 (Introdução A Vetores, Movimento em 2D e 3D)thalitaAinda não há avaliações
- Capítulo 3 VetoresDocumento4 páginasCapítulo 3 VetoresdonkbraAinda não há avaliações
- Biomecânica para Fisioterapeutas - 69pDocumento69 páginasBiomecânica para Fisioterapeutas - 69pivanfersantosAinda não há avaliações
- Representação e operações com vetoresDocumento3 páginasRepresentação e operações com vetoresMateus SantosAinda não há avaliações
- Material Sobre VetoresDocumento7 páginasMaterial Sobre VetoresJoyce Helena da SilveiraAinda não há avaliações
- Calculo Numeriaco Com Ainsd RiemmanDocumento22 páginasCalculo Numeriaco Com Ainsd RiemmanMatheus BuenoAinda não há avaliações
- Grandezas VetoresDocumento33 páginasGrandezas Vetoresma riaAinda não há avaliações
- Vetores Parte 1Documento25 páginasVetores Parte 1Matheus PalhetaAinda não há avaliações
- Curso Física 1. Aula - 4. VetoresDocumento55 páginasCurso Física 1. Aula - 4. VetoresDeivid Silva de SouzaAinda não há avaliações
- 1º Ano - 1 ListaDocumento3 páginas1º Ano - 1 ListacoutvolivrAinda não há avaliações
- Vetores IFPBDocumento57 páginasVetores IFPBEmilly Luisa Oliveira da CostaAinda não há avaliações
- Apostila GAALDocumento16 páginasApostila GAALfernando.vasconcellos.engAinda não há avaliações
- Grandezas físicas vetoriaisDocumento13 páginasGrandezas físicas vetoriaisCamila MonteiroAinda não há avaliações
- VOD Fisica VetoresDocumento16 páginasVOD Fisica VetoresJeferson S. JúniorAinda não há avaliações
- Capitulo 2 PDFDocumento2 páginasCapitulo 2 PDFGiovanna CarvalhoAinda não há avaliações
- Introdução aos Vetores emDocumento76 páginasIntrodução aos Vetores emLeonardo RodriguesAinda não há avaliações
- Aula 1 OKDocumento16 páginasAula 1 OKfpreisAinda não há avaliações
- VetoresDocumento46 páginasVetoreslordmarcio7479Ainda não há avaliações
- Vetores na Geometria AnalíticaDocumento10 páginasVetores na Geometria AnalíticaIsak XavierAinda não há avaliações
- Grandezas vetoriais e escalaresDocumento23 páginasGrandezas vetoriais e escalaresAnanda FreitasAinda não há avaliações
- Vetores definição, operações, exercícios - Mundo EducaçãoDocumento1 páginaVetores definição, operações, exercícios - Mundo Educaçãoalissonjungles175694Ainda não há avaliações
- Toda A Física em Slides - ESCOLADocumento868 páginasToda A Física em Slides - ESCOLApaul R. guidoAinda não há avaliações
- 05 VetoresDocumento16 páginas05 VetoresmlthomazAinda não há avaliações
- Texto de Revisão 02 VetoresDocumento5 páginasTexto de Revisão 02 VetoresRailsonArrdeAinda não há avaliações
- Aula 02 - Vetores_alunosDocumento35 páginasAula 02 - Vetores_alunosmurilo.farinazzoAinda não há avaliações
- Apêndice 2Documento39 páginasApêndice 2Matheus SportsAinda não há avaliações
- Física 1 - FL 05 - Cálculo Vetoris e Lançamentos de ProjéteisDocumento7 páginasFísica 1 - FL 05 - Cálculo Vetoris e Lançamentos de ProjéteisLais Germano100% (1)
- Apresentação de Negócios Plano de Projeto 3D Azul BrancoDocumento23 páginasApresentação de Negócios Plano de Projeto 3D Azul Brancovanessa costa guimaraesAinda não há avaliações
- Vetores. Teoria Exercícios Resolvidos e Propostos. Ensino Médio.Documento6 páginasVetores. Teoria Exercícios Resolvidos e Propostos. Ensino Médio.Felipe SilvaAinda não há avaliações
- Física - Grandezas escalares e vetoriaisDocumento12 páginasFísica - Grandezas escalares e vetoriaisDalmedson Freitas FilhoAinda não há avaliações
- Módulo 01 Livro 2 Grandezas Físicas 1 GrandezasDocumento193 páginasMódulo 01 Livro 2 Grandezas Físicas 1 GrandezasfodiusAinda não há avaliações
- Aula 01 VetoresDocumento6 páginasAula 01 Vetoresgil0911Ainda não há avaliações
- Ifc3 Revisao Vetores Cap03 Aula 01 1s2023Documento36 páginasIfc3 Revisao Vetores Cap03 Aula 01 1s2023José Antônio de Andrade JúniorAinda não há avaliações
- GeoAnálise VetorialDocumento3 páginasGeoAnálise VetorialFrancisco JuniorAinda não há avaliações
- Física Geral - Aula 01 - VetoresDocumento11 páginasFísica Geral - Aula 01 - VetoresClifford NeitzelAinda não há avaliações
- Geometria AnalíticaDocumento12 páginasGeometria Analíticakennedy31Ainda não há avaliações
- PRODUTO ESCALAR - PRODUTO VETORIAL - PesquisaDocumento15 páginasPRODUTO ESCALAR - PRODUTO VETORIAL - PesquisaLuciano CarvalhoAinda não há avaliações
- Vetores: operações e coordenadasDocumento76 páginasVetores: operações e coordenadasoliverAinda não há avaliações
- Produto Vetorial e Produto EscalarDocumento5 páginasProduto Vetorial e Produto EscalarRogerio Fernandes Amorim100% (5)
- GUIA UNI 1 Tópicos Integradores II - Engenharia Civil - SERDocumento27 páginasGUIA UNI 1 Tópicos Integradores II - Engenharia Civil - SERRicardo MouraAinda não há avaliações
- GA Cap 01Documento10 páginasGA Cap 01Jéssica Tavares HeffernanAinda não há avaliações
- O Ensino Da Matemática Na Educação Básica Através Do Software GeogebraNo EverandO Ensino Da Matemática Na Educação Básica Através Do Software GeogebraAinda não há avaliações
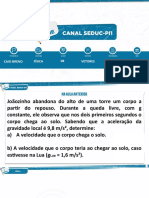
- Queda livre e lançamento verticalDocumento20 páginasQueda livre e lançamento verticalreclamando.mp4Ainda não há avaliações
- Língua e linguagem: o que é e qual a diferençaDocumento25 páginasLíngua e linguagem: o que é e qual a diferençareclamando.mp4Ainda não há avaliações
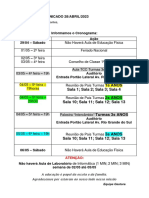
- Comunicado 28.abril.2023Documento1 páginaComunicado 28.abril.2023reclamando.mp4Ainda não há avaliações
- Acesso Boletim On LineDocumento1 páginaAcesso Boletim On Linereclamando.mp4Ainda não há avaliações
- Chamado de Cthulhu Ficha de Personagem Era Moderna - Editável-3Documento2 páginasChamado de Cthulhu Ficha de Personagem Era Moderna - Editável-3reclamando.mp4Ainda não há avaliações
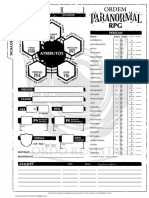
- Ficha Branca OPDocumento2 páginasFicha Branca OPreclamando.mp4Ainda não há avaliações
- Investigador modernoDocumento2 páginasInvestigador modernoreclamando.mp4Ainda não há avaliações
- Ficha Branca OPDocumento2 páginasFicha Branca OPreclamando.mp4Ainda não há avaliações
- Ficha de Agente - Criar um personagem de RPGDocumento2 páginasFicha de Agente - Criar um personagem de RPGAllan Ferreira80% (5)
- Fundamentos de CalculoDocumento228 páginasFundamentos de CalculoMarcos Souza Ecb100% (1)
- Programação Java - Vetores e HerançaDocumento11 páginasProgramação Java - Vetores e HerançaCarla NogueiraAinda não há avaliações
- Gab Cal1 p1 121 TIPOADocumento2 páginasGab Cal1 p1 121 TIPOAJordão B SilvaAinda não há avaliações
- Currículo: Emai Tecnologia E InovaçãoDocumento180 páginasCurrículo: Emai Tecnologia E InovaçãoAndreia Floro de MeloAinda não há avaliações
- Teorica 24 - Cutting PlanesDocumento13 páginasTeorica 24 - Cutting PlaneschalepedroAinda não há avaliações
- Harmônicos esféricos: solução da equação de Laplace em coordenadas esféricasDocumento7 páginasHarmônicos esféricos: solução da equação de Laplace em coordenadas esféricasMatheus GuimaraesAinda não há avaliações
- Exercícios - Recuperação - Geografia - 2º Ano - Prof JulianaDocumento9 páginasExercícios - Recuperação - Geografia - 2º Ano - Prof JulianaeberpinhoAinda não há avaliações
- Probabilidades de testemunhas em acidente de ônibusDocumento34 páginasProbabilidades de testemunhas em acidente de ônibusEuzenice Mendonça de OliveiraAinda não há avaliações
- Cope ZeroDocumento160 páginasCope ZeroLalbertoAinda não há avaliações
- Monómio Forma Canónica Parte Numérica Parte Literal Grau: Ano: Data: FevDocumento2 páginasMonómio Forma Canónica Parte Numérica Parte Literal Grau: Ano: Data: FevJoca AlvesAinda não há avaliações
- Tópicos de Matemática Elementar Vol. IDocumento153 páginasTópicos de Matemática Elementar Vol. IRobson Tavares100% (7)
- Pequeno Livro de Desmatemática - Guià o de LeituraDocumento6 páginasPequeno Livro de Desmatemática - Guià o de LeituraRaquel Mendes E CameloAinda não há avaliações
- Aula 02 - Equações Diferenciais de 1° Ordem - Separáveis e HomogêneasDocumento13 páginasAula 02 - Equações Diferenciais de 1° Ordem - Separáveis e Homogêneaspauloamancioferro100% (1)
- PolinomiosDocumento3 páginasPolinomiosCristiane MesquitaAinda não há avaliações
- trABALHO BASES MATEMATICASDocumento5 páginastrABALHO BASES MATEMATICASGALVAOFORENSEAinda não há avaliações
- Tese68 Invariantes FinalDocumento83 páginasTese68 Invariantes FinalEverton LiraAinda não há avaliações
- Prova Da 1 Fase - Nível II - OMIFCE 2023Documento8 páginasProva Da 1 Fase - Nível II - OMIFCE 2023alexysilva03Ainda não há avaliações
- Semana 04 - Lista de QuestõesDocumento10 páginasSemana 04 - Lista de QuestõesJoão Gratão Do NascimentoAinda não há avaliações
- Raciocínio lógico-matemático: lógica, números, porcentagem e proporcionalidadeDocumento56 páginasRaciocínio lógico-matemático: lógica, números, porcentagem e proporcionalidadeMax Alessandro Silveira Franca Franca100% (1)
- Fração Geratriz - Toda MatériaDocumento12 páginasFração Geratriz - Toda MatériaRodrigo KialandaAinda não há avaliações
- Desafio Objetivo 5ano Fund2 Matematica 210913Documento12 páginasDesafio Objetivo 5ano Fund2 Matematica 210913emersongoisAinda não há avaliações
- T2 LabVr2-2Documento1 páginaT2 LabVr2-2Eden EdwardsAinda não há avaliações
- SASDocumento147 páginasSASDiego Ferreira Schiezari100% (1)
- Em Português.Documento210 páginasEm Português.Valdir AvelinoAinda não há avaliações
- Lista 02Documento2 páginasLista 02Davi MatiasAinda não há avaliações
- Aplicação de matrizes no processamento de imagens usando ScilabDocumento53 páginasAplicação de matrizes no processamento de imagens usando ScilabIran Paulo SilveiraAinda não há avaliações
- Curso Geometria SagradaDocumento33 páginasCurso Geometria SagradaEdinaprado Prado100% (4)
- Nivelamento Pre Calculo2Documento4 páginasNivelamento Pre Calculo2Marcus Vinicius0% (1)
- Caderno de Soluções Do MóduloDocumento34 páginasCaderno de Soluções Do MóduloValdirene M. FerreiraAinda não há avaliações
- Números Naturais - Exercícios ComplementaresDocumento4 páginasNúmeros Naturais - Exercícios ComplementaresDianacrizAinda não há avaliações