Você também pode gostar
- Trabalho 03Documento10 páginasTrabalho 03eng.walter.soaresAinda não há avaliações
- ResumoDocumento10 páginasResumoDiogo LandiAinda não há avaliações
- Motor CC SiemensDocumento9 páginasMotor CC Siemensgpamaster-1Ainda não há avaliações
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Relatório Conversores EletromecânicosDocumento7 páginasRelatório Conversores EletromecânicosMARCO THULIO ALVES MACIELAinda não há avaliações
- Relatorio de MecFluDocumento12 páginasRelatorio de MecFluBrailleEcran ProjetoAinda não há avaliações
- Domingos Bernardo - F... P.A.T.Suspens - P.Maquinas 123Documento58 páginasDomingos Bernardo - F... P.A.T.Suspens - P.Maquinas 123abacar da rosa godinhoAinda não há avaliações
- Unidade 1: Modelagem e Obtenção de Parâmetros de Um Motor CCDocumento15 páginasUnidade 1: Modelagem e Obtenção de Parâmetros de Um Motor CCRodolfo Brigatto FerreiraAinda não há avaliações
- 2005 ControleDeMotorDeAutorama TG ArturManieroDocumento71 páginas2005 ControleDeMotorDeAutorama TG ArturManieroMarceloAinda não há avaliações
- Modelagem Do MITDocumento15 páginasModelagem Do MITsalvatteAinda não há avaliações
- TP3 Final - Turno 4 - Grupo 3Documento20 páginasTP3 Final - Turno 4 - Grupo 3footballmanager961Ainda não há avaliações
- Turbina Pelton PDFDocumento11 páginasTurbina Pelton PDFRaime TomazAinda não há avaliações
- 2715 6072 1 SMDocumento19 páginas2715 6072 1 SMJOERDSON TIAGO BATISTA DA SILVAAinda não há avaliações
- Relatorio MCCDocumento4 páginasRelatorio MCCZTE TREZEAinda não há avaliações
- Experimento 2 e 3 - v6 PDFDocumento12 páginasExperimento 2 e 3 - v6 PDFDaniel LsAinda não há avaliações
- Relatório de Máquinas Eléricas, Experimentos 02Documento8 páginasRelatório de Máquinas Eléricas, Experimentos 02Diego DrumondAinda não há avaliações
- Relatorio 3 Conv 2Documento10 páginasRelatorio 3 Conv 2Xian PingAinda não há avaliações
- Relatório 07 - EletricidadeDocumento15 páginasRelatório 07 - EletricidadeDaniel RodrigoAinda não há avaliações
- Máquinas de Corrente Contínua - WDocumento19 páginasMáquinas de Corrente Contínua - WMaiko Hortêncio ChintinguizaAinda não há avaliações
- Relatório 3 - RevDocumento20 páginasRelatório 3 - RevAgeuCrispimAinda não há avaliações
- Automação II - Relatório Experimento Inversor de FrequenciaDocumento8 páginasAutomação II - Relatório Experimento Inversor de FrequenciaPhillipe S. ScofieldAinda não há avaliações
- Aprendizagem em FocoDocumento41 páginasAprendizagem em Focomacelo barrosAinda não há avaliações
- Maquinas SincronasDocumento5 páginasMaquinas SincronasDarlanny DinizAinda não há avaliações
- Mse Aula 03 Motores Elétricos 12052022Documento77 páginasMse Aula 03 Motores Elétricos 12052022douglasncamiloAinda não há avaliações
- Relatório - Soft StarterDocumento15 páginasRelatório - Soft StartermaquinatrifasicaAinda não há avaliações
- Relatório de Máquinas 04 - Brenda FarahDocumento11 páginasRelatório de Máquinas 04 - Brenda FarahBrenda Montes Cardoso FarahAinda não há avaliações
- Controle de VelocidadeDocumento16 páginasControle de VelocidadeGleisonGomesAinda não há avaliações
- Manual Motores VogesDocumento65 páginasManual Motores VogesARIMATEAM100% (4)
- Atividade Prática 8 - Eletrotécnica 2021.2Documento11 páginasAtividade Prática 8 - Eletrotécnica 2021.2BrianAinda não há avaliações
- Ensaio Motor CC PDFDocumento35 páginasEnsaio Motor CC PDFRogérioPaganiniValentini100% (4)
- Identificação de Parâmetros Do Motor CC PDFDocumento7 páginasIdentificação de Parâmetros Do Motor CC PDFHanzo HasashiAinda não há avaliações
- Relatório 04 - Lab. Maquinas EletricasDocumento7 páginasRelatório 04 - Lab. Maquinas EletricasArtur Cesar da SilvaAinda não há avaliações
- Motor CC VI PDFDocumento4 páginasMotor CC VI PDFJean Santis BrandAinda não há avaliações
- 3 Maquina Inducao 2021 22 GuiaDocumento13 páginas3 Maquina Inducao 2021 22 GuiaDiAinda não há avaliações
- TP4 Final - Turno 4 - Grupo 3Documento16 páginasTP4 Final - Turno 4 - Grupo 3footballmanager961Ainda não há avaliações
- Determinação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoDocumento7 páginasDeterminação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoCesar MaiaAinda não há avaliações
- Lelo 3 - Rel 12 - Gerador PWMDocumento13 páginasLelo 3 - Rel 12 - Gerador PWMLuana IwamuraAinda não há avaliações
- Relatório 7. Simulação Psim. Lourençoo e GarciaDocumento11 páginasRelatório 7. Simulação Psim. Lourençoo e GarciaEdson LourençoAinda não há avaliações
- Especificando Um Motor - Grupo 3Documento27 páginasEspecificando Um Motor - Grupo 3João Paulo AndradeAinda não há avaliações
- Relatório 8,9,10 - Lab 2Documento14 páginasRelatório 8,9,10 - Lab 2Daniel reisAinda não há avaliações
- UntitledDocumento7 páginasUntitledLucas RenanAinda não há avaliações
- Relatório Técnico - Aula Laboratorial 4Documento8 páginasRelatório Técnico - Aula Laboratorial 4Thiago RodriguesAinda não há avaliações
- ArtigoMáquinas Janneson&JohnLennonDocumento6 páginasArtigoMáquinas Janneson&JohnLennonJohn SouzaAinda não há avaliações
- Atividade 1 - Gabriel GomesDocumento13 páginasAtividade 1 - Gabriel GomesModestoAinda não há avaliações
- Modelagem Motor CCDocumento5 páginasModelagem Motor CCRicardo TironeAinda não há avaliações
- Relatório 02 - 03Documento12 páginasRelatório 02 - 03Paloma Medeiros BaquerAinda não há avaliações
- Gaudencio Amos - C - P.A.T.Correia11Documento57 páginasGaudencio Amos - C - P.A.T.Correia11abacar da rosa godinhoAinda não há avaliações
- Trabalho de Motores ElétricosDocumento16 páginasTrabalho de Motores ElétricosYago AraújoAinda não há avaliações
- Alex Lima - Preparatorio 4Documento8 páginasAlex Lima - Preparatorio 4Alex Lima SilvaAinda não há avaliações
- Relatorio 3 Maquinas e AcionamentosDocumento7 páginasRelatorio 3 Maquinas e AcionamentosgrpothysufdtyhuAinda não há avaliações
- Analise Montagem Inversor - Fábio Gomes e Marcelo Abreu - Lab. AcionamentosDocumento6 páginasAnalise Montagem Inversor - Fábio Gomes e Marcelo Abreu - Lab. AcionamentosAna Clara SilvaAinda não há avaliações
- Rel 2 - ConversãoDocumento27 páginasRel 2 - ConversãoIsabelle CoutoAinda não há avaliações
- Relatório de Máquinas 03 - Brenda FarahDocumento10 páginasRelatório de Máquinas 03 - Brenda FarahBrenda Montes Cardoso FarahAinda não há avaliações
- PROJETO - Máquinas Motor + InversorDocumento11 páginasPROJETO - Máquinas Motor + InversorviniciusAinda não há avaliações
- (2021) CapítuloDeLivroEditoraPascal SomenteOCapítulo10Documento16 páginas(2021) CapítuloDeLivroEditoraPascal SomenteOCapítulo10Sdgkl OewsgdsAinda não há avaliações
- 1º Relatório Máquinas C. C. ShuntDocumento10 páginas1º Relatório Máquinas C. C. ShuntGrazi AlmeidaAinda não há avaliações
- Guia Ginastica LaboralDocumento32 páginasGuia Ginastica LaboralJefersonAinda não há avaliações
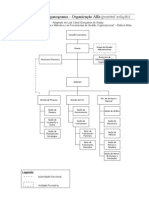
- Exercicio Organograma GabaritoDocumento2 páginasExercicio Organograma GabaritoLuis Carlos83% (18)
- Exercicio para Montagem de FluxogramaDocumento1 páginaExercicio para Montagem de FluxogramaTati Fernandes Teixeira Borg50% (2)
- NHO-06 - Avaliação de Exposição A CalorDocumento49 páginasNHO-06 - Avaliação de Exposição A CalorAlex Costa TriersAinda não há avaliações
- Riscos Na Construção Civil - DDSDocumento5 páginasRiscos Na Construção Civil - DDSHaynan FernandesAinda não há avaliações
- Cartilha nr12 View PDFDocumento96 páginasCartilha nr12 View PDFNazareno S ArrudaAinda não há avaliações
- Fisica 4 - CosmologiaDocumento58 páginasFisica 4 - CosmologiaJefersonAinda não há avaliações
- Nho 01Documento41 páginasNho 01lariad100% (1)
- Manual Impressora PDFDocumento176 páginasManual Impressora PDFJefersonAinda não há avaliações
- Modelo de Artigo Da Revista SCIENTIA - PRIMADocumento9 páginasModelo de Artigo Da Revista SCIENTIA - PRIMAJefersonAinda não há avaliações
- Modelo TCCDocumento10 páginasModelo TCCGeorge Alberto F. CavalcanteAinda não há avaliações
- PMX 65 PDFDocumento248 páginasPMX 65 PDFElidene LavaredaAinda não há avaliações
- MandiocaDocumento4 páginasMandiocaAbsentia BelliAinda não há avaliações
- Dejur 2977.2022 - Primeiro Aditamento - Paulo Gundim - AssinadoDocumento19 páginasDejur 2977.2022 - Primeiro Aditamento - Paulo Gundim - AssinadoClaudiane Ferreira Rildo SouzaAinda não há avaliações
- Aços PropriedadesDocumento14 páginasAços PropriedadesAldenir TabosaAinda não há avaliações
- Relatório 04Documento17 páginasRelatório 04ROSEANA MATA MONTEIROAinda não há avaliações
- VERO Manual de OperacoesDocumento14 páginasVERO Manual de OperacoesLeticiaAinda não há avaliações
- RSVIEW32Documento126 páginasRSVIEW32Marquinho_Ainda não há avaliações
- N2 Atividade 1 SO IDocumento2 páginasN2 Atividade 1 SO IDaniel MasudaAinda não há avaliações
- Lista de MateriaisDocumento28 páginasLista de MateriaisVagnerlds100% (3)
- Avaliação NR 33 (Word)Documento2 páginasAvaliação NR 33 (Word)Mario MonteiroAinda não há avaliações
- 235 869 1 PBDocumento9 páginas235 869 1 PBAndré Miguel CabralAinda não há avaliações
- Divulgação Das Preferências - 22 Sessão Extraordinária 2022 - Presencial - 2 Turma - 20-09-2022 14hDocumento5 páginasDivulgação Das Preferências - 22 Sessão Extraordinária 2022 - Presencial - 2 Turma - 20-09-2022 14hRodrigo OliveiraAinda não há avaliações
- EAD Direito Moral ÉticaDocumento76 páginasEAD Direito Moral ÉticaMax AdansAinda não há avaliações
- Curso de Operador de Maquinas PessadasDocumento29 páginasCurso de Operador de Maquinas PessadasFabio Junior Terraplam100% (1)
- Como Elaborar Uma Proposta ProjetoDocumento5 páginasComo Elaborar Uma Proposta ProjetoFelipe TimóteoAinda não há avaliações
- Vivo - Box Huawei E5172s Manual Do Usuário PDFDocumento47 páginasVivo - Box Huawei E5172s Manual Do Usuário PDFWellington Machado100% (1)
- Manual IgluCarDocumento12 páginasManual IgluCarRodrigo MárcioAinda não há avaliações
- O Papel Das Agências de Viagens e Turismo No Desenvolvimento Do Turismo Emissor e ReceptorDocumento160 páginasO Papel Das Agências de Viagens e Turismo No Desenvolvimento Do Turismo Emissor e ReceptorElio FernandesAinda não há avaliações
- Simulado Inss Guilherme BiazottoDocumento6 páginasSimulado Inss Guilherme BiazottoPoliana Cristina0% (1)
- Questões para Prova de Direito EmpresarialDocumento11 páginasQuestões para Prova de Direito EmpresarialAdalto OpcoesAinda não há avaliações
- 34 Gestão Da InformaçãoDocumento72 páginas34 Gestão Da InformaçãoRômulo RosaAinda não há avaliações
- CAVALCANTE, Pedro. Descentralização Das Políticas Públicas Sob A Ótica Neoinstitucional PDFDocumento24 páginasCAVALCANTE, Pedro. Descentralização Das Políticas Públicas Sob A Ótica Neoinstitucional PDFVinicius FerreiraAinda não há avaliações
- Mux+Demux+Gerador+Check de Paridade PDFDocumento3 páginasMux+Demux+Gerador+Check de Paridade PDFDhandara LucymillaAinda não há avaliações
- Catalogo Ortolar-30-11Documento24 páginasCatalogo Ortolar-30-11SETOR FINANCEIROAinda não há avaliações
- Apostila Bares e RestaurantesDocumento12 páginasApostila Bares e RestaurantesChefe BarAinda não há avaliações
- GC T007 - Especificacao Do Web Service Completo - PontoWEBDocumento43 páginasGC T007 - Especificacao Do Web Service Completo - PontoWEBFábio DiasAinda não há avaliações
- PT Permissão de Trabalho Concretagem - SkyboxDocumento2 páginasPT Permissão de Trabalho Concretagem - SkyboxDiego Sousa LopesAinda não há avaliações
- Grupo CGM Manual Do Motorista 01 2021Documento42 páginasGrupo CGM Manual Do Motorista 01 2021Nicolas MartinsAinda não há avaliações
- Cartilha UnicidDocumento5 páginasCartilha UnicidSâmea LorenaAinda não há avaliações
- Quadro ConceptualDocumento67 páginasQuadro ConceptualJo0% (1)
- Biomecânica Básica dos Exercícios: Membros InferioresNo EverandBiomecânica Básica dos Exercícios: Membros InferioresNota: 3.5 de 5 estrelas3.5/5 (8)
- Treinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisNo EverandTreinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisNota: 4.5 de 5 estrelas4.5/5 (169)
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- 365 Ideias De Posts Para Ter Um Instagram De Sucesso!No Everand365 Ideias De Posts Para Ter Um Instagram De Sucesso!Ainda não há avaliações
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Guia Definitivo Para Dominar o Bitcoin e as CriptomoedasNo EverandGuia Definitivo Para Dominar o Bitcoin e as CriptomoedasNota: 4 de 5 estrelas4/5 (5)
- Cérebro Singular: Como estimular crianças no espectro autista ou com atrasos no desenvolvimentoNo EverandCérebro Singular: Como estimular crianças no espectro autista ou com atrasos no desenvolvimentoNota: 5 de 5 estrelas5/5 (1)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)