Você também pode gostar
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Pratica 1 - Maquinas 2 UTFPRDocumento6 páginasPratica 1 - Maquinas 2 UTFPRJefersonAinda não há avaliações
- Análise de Estabilidade em Sistemas de PotênciaDocumento92 páginasAnálise de Estabilidade em Sistemas de PotênciaNilo DantasAinda não há avaliações
- TP3 Final - Turno 4 - Grupo 3Documento20 páginasTP3 Final - Turno 4 - Grupo 3footballmanager961Ainda não há avaliações
- Relatório Conversores EletromecânicosDocumento7 páginasRelatório Conversores EletromecânicosMARCO THULIO ALVES MACIELAinda não há avaliações
- Motor CC SiemensDocumento9 páginasMotor CC Siemensgpamaster-1Ainda não há avaliações
- Frenagem MIT inversão fasesDocumento6 páginasFrenagem MIT inversão fasesGabriel MotaAinda não há avaliações
- Controle de velocidade em máquinas de induçãoDocumento42 páginasControle de velocidade em máquinas de induçãoSamuel MartinsAinda não há avaliações
- Atividade 1 - Gabriel GomesDocumento13 páginasAtividade 1 - Gabriel GomesModestoAinda não há avaliações
- Laborato - Rio 1 - P2Documento3 páginasLaborato - Rio 1 - P2Michael ZardoAinda não há avaliações
- Caracterização de uma máquina de indução em regime permanenteDocumento13 páginasCaracterização de uma máquina de indução em regime permanenteDiAinda não há avaliações
- Determinação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoDocumento7 páginasDeterminação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoCesar MaiaAinda não há avaliações
- Projeto de acionamento de transportador suspensoDocumento58 páginasProjeto de acionamento de transportador suspensoabacar da rosa godinhoAinda não há avaliações
- Modelagem Do MITDocumento15 páginasModelagem Do MITsalvatteAinda não há avaliações
- Servo Motor CCDocumento15 páginasServo Motor CCRachel DaleAinda não há avaliações
- Especificando Um Motor - Grupo 3Documento27 páginasEspecificando Um Motor - Grupo 3João Paulo AndradeAinda não há avaliações
- Máquinas Síncronas RelatórioDocumento7 páginasMáquinas Síncronas RelatórioLucas RenanAinda não há avaliações
- Motor de Indução RelatórioDocumento5 páginasMotor de Indução RelatórioDom Fuas Manuel ArmandoAinda não há avaliações
- ControleVelocidadeMotorCC 2007Documento47 páginasControleVelocidadeMotorCC 2007AlyssonAlmeidaAinda não há avaliações
- 2005 ControleDeMotorDeAutorama TG ArturManieroDocumento71 páginas2005 ControleDeMotorDeAutorama TG ArturManieroMarceloAinda não há avaliações
- Relatório Técnico - Aula Laboratorial 4Documento8 páginasRelatório Técnico - Aula Laboratorial 4Thiago RodriguesAinda não há avaliações
- Controle de VelocidadeDocumento16 páginasControle de VelocidadeGleisonGomesAinda não há avaliações
- Rendimento e fator de potência de motor de indução trifásicoDocumento8 páginasRendimento e fator de potência de motor de indução trifásicoAlex Lima SilvaAinda não há avaliações
- Relatório MCC: curvas de motor CCDocumento4 páginasRelatório MCC: curvas de motor CCZTE TREZEAinda não há avaliações
- Relatório 3 - RevDocumento20 páginasRelatório 3 - RevAgeuCrispimAinda não há avaliações
- Ensaio Motor CC PDFDocumento35 páginasEnsaio Motor CC PDFRogérioPaganiniValentini100% (4)
- Experimento 2 e 3 - v6 PDFDocumento12 páginasExperimento 2 e 3 - v6 PDFDaniel LsAinda não há avaliações
- ArtigoMáquinas Janneson&JohnLennonDocumento6 páginasArtigoMáquinas Janneson&JohnLennonJohn SouzaAinda não há avaliações
- Controle de Portão ElétricoDocumento10 páginasControle de Portão ElétricoWILLIAN PATRICK DA SILVA RODRIGUESAinda não há avaliações
- Relatório 04 - Lab. Maquinas EletricasDocumento7 páginasRelatório 04 - Lab. Maquinas EletricasArtur Cesar da SilvaAinda não há avaliações
- Regulacao de Velocidade - ComandoDocumento11 páginasRegulacao de Velocidade - ComandoAldair Latifo Jamal LinoAinda não há avaliações
- Automação II - Relatório Experimento Inversor de FrequenciaDocumento8 páginasAutomação II - Relatório Experimento Inversor de FrequenciaPhillipe S. ScofieldAinda não há avaliações
- Pratica 6Documento5 páginasPratica 6PedroSartoriAinda não há avaliações
- Lab04 - Sistema de Terceira OrdemDocumento23 páginasLab04 - Sistema de Terceira OrdemArthur HenriqueAinda não há avaliações
- Relatório de Máquinas Eléricas, Experimentos 02Documento8 páginasRelatório de Máquinas Eléricas, Experimentos 02Diego DrumondAinda não há avaliações
- Análise de Variador de VelocidadeDocumento35 páginasAnálise de Variador de VelocidadeBruno GonçaloAinda não há avaliações
- Exp7 - GERADORES DE INDUÇÃO EXCITADOS PELA REDE E AUTOEXCITADOSDocumento11 páginasExp7 - GERADORES DE INDUÇÃO EXCITADOS PELA REDE E AUTOEXCITADOSLucas SilveiraAinda não há avaliações
- Lista 042023Documento2 páginasLista 042023janaina carvalhoAinda não há avaliações
- Atividade de Envio - ERIVELTO RODRIGUESDocumento4 páginasAtividade de Envio - ERIVELTO RODRIGUESanaludesignerdeinterioresAinda não há avaliações
- Ensaios em máquina síncronaDocumento13 páginasEnsaios em máquina síncronaVinicius CardosoAinda não há avaliações
- Excitatriz Sem Escovas de Gerador SíncronoDocumento10 páginasExcitatriz Sem Escovas de Gerador SíncronoFilipe Simoes OliveiraAinda não há avaliações
- Relatorio - Curvas de Compressores CestrifugosDocumento12 páginasRelatorio - Curvas de Compressores CestrifugosACSA LIDIA DAMASCENO FERNANDES SOUSAAinda não há avaliações
- Laboratà Rio 1Documento4 páginasLaboratà Rio 1Michael ZardoAinda não há avaliações
- Motor CC avaliação 1Documento3 páginasMotor CC avaliação 1alan_smoAinda não há avaliações
- Analise Montagem Inversor - Fábio Gomes e Marcelo Abreu - Lab. AcionamentosDocumento6 páginasAnalise Montagem Inversor - Fábio Gomes e Marcelo Abreu - Lab. AcionamentosAna Clara SilvaAinda não há avaliações
- Cálculo Motores 40Documento6 páginasCálculo Motores 40PauloAinda não há avaliações
- TP4 Final - Turno 4 - Grupo 3Documento16 páginasTP4 Final - Turno 4 - Grupo 3footballmanager961Ainda não há avaliações
- 1aLista_Documento4 páginas1aLista_Carol BandoliAinda não há avaliações
- PROVAP3Documento1 páginaPROVAP3Iago Tsukayama VellosoAinda não há avaliações
- Artigo Motor DC e PID AnalógicoDocumento9 páginasArtigo Motor DC e PID AnalógicolucapetaAinda não há avaliações
- Partida e frenagem resistiva de MCC shunt com CLPDocumento25 páginasPartida e frenagem resistiva de MCC shunt com CLPRicardo CruzAinda não há avaliações
- Relatório 07 - EletricidadeDocumento15 páginasRelatório 07 - EletricidadeDaniel RodrigoAinda não há avaliações
- Controle de velocidade de motor CCDocumento3 páginasControle de velocidade de motor CCPaulo SouzaAinda não há avaliações
- Relatório6 - Controle de Velocidade Do Motor ShuntDocumento8 páginasRelatório6 - Controle de Velocidade Do Motor ShuntMaria MachadoAinda não há avaliações
- Resolução Maquinas Eletricas Fitzgerald edição 7 capítulo 6Documento162 páginasResolução Maquinas Eletricas Fitzgerald edição 7 capítulo 6Amurildin Abubacar Ibraimo75% (4)
- ResumoDocumento10 páginasResumoDiogo LandiAinda não há avaliações
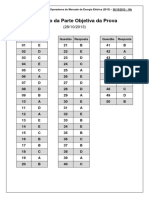
- Gabarito 2013Documento1 páginaGabarito 2013eng.walter.soaresAinda não há avaliações
- Prova Abraceel 2017-Prova de RevalidacaoDocumento22 páginasProva Abraceel 2017-Prova de RevalidacaoMatheus Raffael SantosAinda não há avaliações
- Prova Abraceel 2017 - Prova de CertificaçãoDocumento30 páginasProva Abraceel 2017 - Prova de Certificaçãoeng.walter.soaresAinda não há avaliações
- Revisão Bibliográfica Sobre Surge-Test e Descargas Parciais em Geradores SíncronosDocumento4 páginasRevisão Bibliográfica Sobre Surge-Test e Descargas Parciais em Geradores Síncronoseng.walter.soaresAinda não há avaliações
- Os Processos de Abertura Dos Mercados Livres de Energia Elétrica No Contexto InternacionalDocumento8 páginasOs Processos de Abertura Dos Mercados Livres de Energia Elétrica No Contexto Internacionaleng.walter.soaresAinda não há avaliações
- GabaritoDocumento39 páginasGabaritoDaniel AzevedoAinda não há avaliações
- MT-512Ri controlador digital para refrigeração e degeloDocumento1 páginaMT-512Ri controlador digital para refrigeração e degeloluiz100% (1)
- Planillhas Dimensionamento DutosDocumento3 páginasPlanillhas Dimensionamento DutosRafael MendesAinda não há avaliações
- Roteiro de Cálculo Conversor DCDC PDFDocumento14 páginasRoteiro de Cálculo Conversor DCDC PDFdomingos aladirAinda não há avaliações
- NBR 10662 - Isolantes Termicos Dos de Silicato de CalcioDocumento9 páginasNBR 10662 - Isolantes Termicos Dos de Silicato de CalcioBarbara Gama FariasAinda não há avaliações
- Determinação da Curva da Bomba CentrífugaDocumento22 páginasDeterminação da Curva da Bomba CentrífugabreendalimaAinda não há avaliações
- Relatório 5 - Dilatação TérmicaDocumento8 páginasRelatório 5 - Dilatação TérmicaJuniorAinda não há avaliações
- Apost OP I - Aula (Sala) 2022Documento131 páginasApost OP I - Aula (Sala) 2022Galbert CasterlinaAinda não há avaliações
- Densidade, Massa Específica, Peso Específico, Pressão Rafael TrovãoDocumento3 páginasDensidade, Massa Específica, Peso Específico, Pressão Rafael TrovãoGabriel LimaAinda não há avaliações
- Manual de Falhas APC SURTDocumento43 páginasManual de Falhas APC SURTRobson Costa AssunçãoAinda não há avaliações
- Formação AjudanteDocumento42 páginasFormação AjudanteAllanBorgesAinda não há avaliações
- Lista Exercicios 04 Motores SíncronosDocumento2 páginasLista Exercicios 04 Motores SíncronosMaria Luíza Vasconcelos do NascimentoAinda não há avaliações
- Princípios básicos de hidráulicaDocumento201 páginasPrincípios básicos de hidráulicaIsabela PortoAinda não há avaliações
- 03 09 18 DinâmicaDocumento89 páginas03 09 18 DinâmicaADRIANOAinda não há avaliações
- Plano Inclinado na FísicaDocumento5 páginasPlano Inclinado na FísicaANA PAULA SILVA DOS ANJOSAinda não há avaliações
- 6 Lista Segunda Leie AplicaesDocumento3 páginas6 Lista Segunda Leie AplicaesAldiney marcal CostaAinda não há avaliações
- ABNT NBR 15280-1 - 2017 Dutos Terrestres ProjetosDocumento78 páginasABNT NBR 15280-1 - 2017 Dutos Terrestres ProjetosDavid RufinoAinda não há avaliações
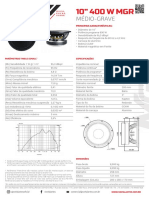
- 10 400 MGRDocumento2 páginas10 400 MGRJose carlos manuel da silva CarlinhosAinda não há avaliações
- Mapa Mental de MatemáticaDocumento2 páginasMapa Mental de MatemáticaDavid trumpet100% (1)
- Projeto de Dimensionamento de Inversor Trifásico SVPWMDocumento6 páginasProjeto de Dimensionamento de Inversor Trifásico SVPWMPaulo LimaAinda não há avaliações
- Catalogo Weg Acionadores - Temporizadores-ProtetoresDocumento2 páginasCatalogo Weg Acionadores - Temporizadores-ProtetoresEdu ArdoAinda não há avaliações
- Exercícios de Movimento RectilíneoDocumento4 páginasExercícios de Movimento RectilíneoPróspero Hazael Cunzuna MulazaAinda não há avaliações
- 000067Documento33 páginas000067Vlaudemir Barbosa da RochaAinda não há avaliações
- Lançamento horizontal e oblíquoDocumento5 páginasLançamento horizontal e oblíquoReginaldo CamposAinda não há avaliações
- Ward LeonardDocumento27 páginasWard Leonardjonasguarata100% (2)
- Ficha Trabalho1Documento3 páginasFicha Trabalho1Joaquim LoureiroAinda não há avaliações
- Relatorio 3 - Constante de Tempo em Circuitos RCDocumento9 páginasRelatorio 3 - Constante de Tempo em Circuitos RCRaquel RamosAinda não há avaliações
- Grupo Gerador Cummins DS GMGDocumento4 páginasGrupo Gerador Cummins DS GMGMarcelo Hein da LuzAinda não há avaliações
- F2.5 Ficha5 FísicaDocumento3 páginasF2.5 Ficha5 FísicaBernasAinda não há avaliações
- Motoniveladoras RG140, RG170 e RG200Documento2 páginasMotoniveladoras RG140, RG170 e RG200Jorge zangarelliAinda não há avaliações