Você também pode gostar
- Ebook Aprenda ArduinoDocumento181 páginasEbook Aprenda ArduinoMichel Müller100% (3)
- Curso de Forno MicroondasDocumento59 páginasCurso de Forno MicroondasEdson Pereira RodriguesAinda não há avaliações
- Eletrônica Básica PDFDocumento287 páginasEletrônica Básica PDFOscar Molina HernandezAinda não há avaliações
- Fontes Chaveadas CtaDocumento76 páginasFontes Chaveadas CtaAnonymous eGjPsFzx3100% (1)
- Ortiz Eletrônica de Potência 2000 PDFDocumento117 páginasOrtiz Eletrônica de Potência 2000 PDFJulio medeiros0% (1)
- Curso de Manutenção em Controle RemotosDocumento24 páginasCurso de Manutenção em Controle Remotosmbacx100% (1)
- Dicas de Consertos de TV PhilcoDocumento6 páginasDicas de Consertos de TV PhilcoAdalberto AzevêdoAinda não há avaliações
- SE316Documento73 páginasSE316g30.miranda100% (1)
- Relatório Máquina CCDocumento29 páginasRelatório Máquina CCAdrian AlanAinda não há avaliações
- Amplificadores Com TransistorDocumento18 páginasAmplificadores Com TransistorCristian MeloAinda não há avaliações
- Dimensionamento de Partida Direta de Motor TrifasicoDocumento20 páginasDimensionamento de Partida Direta de Motor TrifasicoJosinaldo Justino100% (1)
- Estabilidade de Sistemas de PotênciaDocumento92 páginasEstabilidade de Sistemas de PotênciaNilo DantasAinda não há avaliações
- Excitatriz Sem Escovas de Gerador SíncronoDocumento10 páginasExcitatriz Sem Escovas de Gerador SíncronoFilipe Simoes OliveiraAinda não há avaliações
- ResumoDocumento10 páginasResumoDiogo LandiAinda não há avaliações
- Identificação de Parâmetros Do Motor CC PDFDocumento7 páginasIdentificação de Parâmetros Do Motor CC PDFHanzo HasashiAinda não há avaliações
- Relatório Conversores EletromecânicosDocumento7 páginasRelatório Conversores EletromecânicosMARCO THULIO ALVES MACIELAinda não há avaliações
- Ensaio Motor CC PDFDocumento35 páginasEnsaio Motor CC PDFRogérioPaganiniValentini100% (4)
- Conversores CC - Curso BásicoDocumento10 páginasConversores CC - Curso BásicoMatthew WarrenAinda não há avaliações
- 2005 ControleDeMotorDeAutorama TG ArturManieroDocumento71 páginas2005 ControleDeMotorDeAutorama TG ArturManieroMarceloAinda não há avaliações
- Relatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento22 páginasRelatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. Zucatelli100% (1)
- Laboratório - Motor DCDocumento4 páginasLaboratório - Motor DCcefmagnaniAinda não há avaliações
- Lab04 - Sistema de Terceira OrdemDocumento23 páginasLab04 - Sistema de Terceira OrdemArthur HenriqueAinda não há avaliações
- 05 - GCC - Curva de Magnetização e Regulação de TensãoDocumento3 páginas05 - GCC - Curva de Magnetização e Regulação de TensãoZTE TREZEAinda não há avaliações
- Modelagem Motor CCDocumento5 páginasModelagem Motor CCRicardo TironeAinda não há avaliações
- Servo Motor CCDocumento15 páginasServo Motor CCRachel DaleAinda não há avaliações
- Modelo Matemático Motor CCDocumento14 páginasModelo Matemático Motor CCJones ArraesAinda não há avaliações
- Relatório6 - Controle de Velocidade Do Motor ShuntDocumento8 páginasRelatório6 - Controle de Velocidade Do Motor ShuntMaria MachadoAinda não há avaliações
- Controle Adaptativo Aplicado Ao Acionamento de Uma Válvula Borboleta Eletrônica AutomotivaDocumento8 páginasControle Adaptativo Aplicado Ao Acionamento de Uma Válvula Borboleta Eletrônica Automotivacarlos AntonioAinda não há avaliações
- Modelagem Do MITDocumento15 páginasModelagem Do MITsalvatteAinda não há avaliações
- Modelagem Kit LJDocumento20 páginasModelagem Kit LJJoão Lucas Genoveze VarottiAinda não há avaliações
- Mecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCDocumento8 páginasMecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCMarcelo SilvaAinda não há avaliações
- Cópia Traduzida de F57aDocumento9 páginasCópia Traduzida de F57aandre ivoAinda não há avaliações
- Aula15 - MaqCC - Parte04 PDFDocumento39 páginasAula15 - MaqCC - Parte04 PDFGilson JuniorAinda não há avaliações
- Exercicios CC - UFPEDocumento6 páginasExercicios CC - UFPEValdir EduardoAinda não há avaliações
- Artigo Motor DC e PID AnalógicoDocumento9 páginasArtigo Motor DC e PID AnalógicolucapetaAinda não há avaliações
- Domingos Bernardo - F... P.A.T.Suspens - P.Maquinas 123Documento58 páginasDomingos Bernardo - F... P.A.T.Suspens - P.Maquinas 123abacar da rosa godinhoAinda não há avaliações
- Controle de VelocidadeDocumento16 páginasControle de VelocidadeGleisonGomesAinda não há avaliações
- 2a Entrega - Projeto de Um Portão ElétricoDocumento10 páginas2a Entrega - Projeto de Um Portão ElétricoWILLIAN PATRICK DA SILVA RODRIGUESAinda não há avaliações
- Conversores Ca-Ca Controlador de Tensão Com Tca785Documento7 páginasConversores Ca-Ca Controlador de Tensão Com Tca785aurivalAinda não há avaliações
- Relatório - Soft StarterDocumento15 páginasRelatório - Soft StartermaquinatrifasicaAinda não há avaliações
- Roda GiganteDocumento9 páginasRoda GiganteJoana NogueiraAinda não há avaliações
- Controlador CA Mono1Documento18 páginasControlador CA Mono1ElcklymAinda não há avaliações
- Unidade 1: Modelagem e Obtenção de Parâmetros de Um Motor CCDocumento15 páginasUnidade 1: Modelagem e Obtenção de Parâmetros de Um Motor CCRodolfo Brigatto FerreiraAinda não há avaliações
- Critério Das Areas EstabilidadeDocumento16 páginasCritério Das Areas EstabilidadeAlex FerreiraAinda não há avaliações
- Estabilidade de Sistemas de PotênciaDocumento56 páginasEstabilidade de Sistemas de PotênciaGilberto SalesAinda não há avaliações
- Trabalho 03Documento10 páginasTrabalho 03eng.walter.soaresAinda não há avaliações
- Relatório de Máquinas 04 - Brenda FarahDocumento11 páginasRelatório de Máquinas 04 - Brenda FarahBrenda Montes Cardoso FarahAinda não há avaliações
- Sistema Microprocessado para Controle de Posição AngularDocumento14 páginasSistema Microprocessado para Controle de Posição AngularÉlisson RíllerAinda não há avaliações
- 1 A ListaDocumento4 páginas1 A ListaCarol BandoliAinda não há avaliações
- Inversor Artigo OriginalDocumento9 páginasInversor Artigo OriginalEmerson RuizAinda não há avaliações
- Trabalho Acionamentos ElétricosDocumento11 páginasTrabalho Acionamentos ElétricosFelipe NicolaAinda não há avaliações
- Controladores PID (Analógico e Digital) Aplicados em Um Motor CC - Mecatrônica Atual - Automação Industrial de Processos e ManufaturaDocumento11 páginasControladores PID (Analógico e Digital) Aplicados em Um Motor CC - Mecatrônica Atual - Automação Industrial de Processos e Manufaturaheliosmariano8350Ainda não há avaliações
- Atividade 2 Máquinas CCDocumento2 páginasAtividade 2 Máquinas CCNicolas Menezes CoelhoAinda não há avaliações
- Lista de Exercícios 1 FCT PDFDocumento13 páginasLista de Exercícios 1 FCT PDFGabrielAinda não há avaliações
- Geradores Sincronos: Aquiles PEA3560 - Engenharia de Energia Hidroeletrica EpuspDocumento56 páginasGeradores Sincronos: Aquiles PEA3560 - Engenharia de Energia Hidroeletrica EpuspMagno SilvaAinda não há avaliações
- Servo AcionamentosDocumento18 páginasServo AcionamentosPatrese QuelemesAinda não há avaliações
- Compensador Estático de Reativos Controlado A Tiristores Modelagem e SimulaçãoDocumento6 páginasCompensador Estático de Reativos Controlado A Tiristores Modelagem e Simulaçãojulio_souveiaAinda não há avaliações
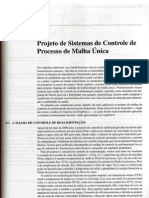
- Corripio - Capitulo 6Documento30 páginasCorripio - Capitulo 6tai_ssAinda não há avaliações
- Sel5864 Cap - 3 1Documento54 páginasSel5864 Cap - 3 1Matheus Martins100% (1)
- Reostato Partida MCCDocumento3 páginasReostato Partida MCCPaulo SouzaAinda não há avaliações
- Relatório 1Documento8 páginasRelatório 1Matheus RodriguesAinda não há avaliações
- Análise Do Ajuste Do Limitador de Subexcitação e Coordenação Efetiva Com A Proteção de Perda de ExcitaçãoDocumento12 páginasAnálise Do Ajuste Do Limitador de Subexcitação e Coordenação Efetiva Com A Proteção de Perda de ExcitaçãoArturo BaltazarAinda não há avaliações
- Aula12 - MaqCC - Parte01Documento45 páginasAula12 - MaqCC - Parte01Wembley OliveiraAinda não há avaliações
- Relatorio Final Ensaio A Vazio e em Curto Maquinas SincronasDocumento13 páginasRelatorio Final Ensaio A Vazio e em Curto Maquinas SincronasVinicius CardosoAinda não há avaliações
- Monografia Elétrica G3 Final v7Documento83 páginasMonografia Elétrica G3 Final v7AlyssonAlmeidaAinda não há avaliações
- B2S CTSS 2012V2Documento313 páginasB2S CTSS 2012V2AlyssonAlmeidaAinda não há avaliações
- 12 - BTS 2013 LTFS V1Documento34 páginas12 - BTS 2013 LTFS V1AlyssonAlmeidaAinda não há avaliações
- 13 - BTS 2013 Ferramentas de Prevenda V5Documento57 páginas13 - BTS 2013 Ferramentas de Prevenda V5AlyssonAlmeidaAinda não há avaliações
- Monografia Elétrica G3 Final v7Documento83 páginasMonografia Elétrica G3 Final v7AlyssonAlmeidaAinda não há avaliações
- 6 - BTS 2013 SVC V1Documento26 páginas6 - BTS 2013 SVC V1AlyssonAlmeidaAinda não há avaliações
- 1 - BTS 2013 Introducao V5Documento18 páginas1 - BTS 2013 Introducao V5AlyssonAlmeidaAinda não há avaliações
- 2 - BTS 2013 Networking V1Documento65 páginas2 - BTS 2013 Networking V1AlyssonAlmeidaAinda não há avaliações
- Monografia RM V25final LCLulio 1Documento146 páginasMonografia RM V25final LCLulio 1AlyssonAlmeidaAinda não há avaliações
- Monografia RM V25final LCLulio 1Documento146 páginasMonografia RM V25final LCLulio 1AlyssonAlmeidaAinda não há avaliações
- 1 - BTS 2013 Introducao V5Documento18 páginas1 - BTS 2013 Introducao V5AlyssonAlmeidaAinda não há avaliações
- T2 e NP2 IntroSC Ano4 Araraquara Maio28Documento2 páginasT2 e NP2 IntroSC Ano4 Araraquara Maio28AlyssonAlmeidaAinda não há avaliações
- Cobenge 1998Documento19 páginasCobenge 1998AlyssonAlmeidaAinda não há avaliações
- ControleVelocidadeMotorCC 2007Documento47 páginasControleVelocidadeMotorCC 2007AlyssonAlmeidaAinda não há avaliações
- Aula 02Documento4 páginasAula 02AlyssonAlmeidaAinda não há avaliações
- Aula Matlab SCI2008Documento11 páginasAula Matlab SCI2008Marcelo PereiraAinda não há avaliações
- Aula4B New2008iDocumento7 páginasAula4B New2008iAlyssonAlmeidaAinda não há avaliações
- Aula 02Documento4 páginasAula 02AlyssonAlmeidaAinda não há avaliações
- 15962-Carta de SmithDocumento63 páginas15962-Carta de SmithMárcio Medeiros100% (2)
- 09 Mod Mat Sist EletromecDocumento7 páginas09 Mod Mat Sist EletromecAlyssonAlmeidaAinda não há avaliações
- 09 Mod Mat Sist EletromecDocumento7 páginas09 Mod Mat Sist EletromecAlyssonAlmeidaAinda não há avaliações
- Curso Microcontroladores Pic No MpLAB 8Documento64 páginasCurso Microcontroladores Pic No MpLAB 8brugomesviAinda não há avaliações
- Trabalho de Eletrônica de Potência - IGBT - Estácio de Sá - 2017.2 - MáquinasDocumento27 páginasTrabalho de Eletrônica de Potência - IGBT - Estácio de Sá - 2017.2 - MáquinasSergio SachtAinda não há avaliações
- Polarização CC Do Transistor BJTDocumento23 páginasPolarização CC Do Transistor BJTRenan BalanAinda não há avaliações
- Conexao Darlington TransistoresDocumento16 páginasConexao Darlington TransistoresCassio SilvaAinda não há avaliações
- O Fototransistor É Um Dispositivo Que Funciona Baseado No Fenômeno Da FotocondutividadeDocumento2 páginasO Fototransistor É Um Dispositivo Que Funciona Baseado No Fenômeno Da FotocondutividadeGustavo FernandesAinda não há avaliações
- Inversor de TensãoDocumento26 páginasInversor de TensãoWanderson AlexandreAinda não há avaliações
- ET74C Aula13 Transistores R01Documento72 páginasET74C Aula13 Transistores R01Enock Soares SantosAinda não há avaliações
- Osciladores de BloqueioDocumento2 páginasOsciladores de BloqueioIsaias Bartolomeu SambgaAinda não há avaliações
- Questões Anac AVIDocumento4 páginasQuestões Anac AVImarcelolimaspaAinda não há avaliações
- Philips 29pt8568s CH Sk5.1l CADocumento43 páginasPhilips 29pt8568s CH Sk5.1l CARogério AraújoAinda não há avaliações
- Guia Rapido para Orcad v3Documento40 páginasGuia Rapido para Orcad v3Fábio CrestaniAinda não há avaliações
- Artigo - Evolução Dos ProcessadoresDocumento10 páginasArtigo - Evolução Dos ProcessadoresCarlos Henrique100% (1)
- #Apostila de Exame Sobre Radioeletricidade 2Documento8 páginas#Apostila de Exame Sobre Radioeletricidade 2Ruddi Elias TowsAinda não há avaliações
- Aula 1 - Eletronica Industrial - Estudo DirigidoDocumento5 páginasAula 1 - Eletronica Industrial - Estudo Dirigidoedlira10Ainda não há avaliações
- Familias LogicasDocumento101 páginasFamilias Logicaseverton_ruppelAinda não há avaliações
- SCS TiristoresDocumento4 páginasSCS TiristoresJulhao HackerAinda não há avaliações
- Base ComputacionalDocumento48 páginasBase ComputacionalWagner VasconcelosAinda não há avaliações
- Resolução AVDDocumento5 páginasResolução AVDRogerio SouzaAinda não há avaliações
- Disp 5pratica 1Documento5 páginasDisp 5pratica 1Andrei CarvalhoAinda não há avaliações
- Circuitos Integrados DigitaisDocumento20 páginasCircuitos Integrados DigitaisRodrigo SantosAinda não há avaliações
- J Fet ResumoDocumento5 páginasJ Fet ResumoRafael BettencourtAinda não há avaliações
- Diodo PDFDocumento5 páginasDiodo PDFjean MICHAELAinda não há avaliações