Você também pode gostar
- Eletrica L200 Sport HPEDocumento175 páginasEletrica L200 Sport HPEMiguel Oyarzabal100% (2)
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
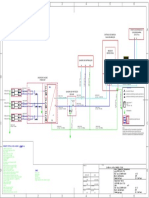
- DIAGRAMA UNIFILAR PHB15K MT-Layout1Documento1 páginaDIAGRAMA UNIFILAR PHB15K MT-Layout1Robson QuinagliaAinda não há avaliações
- Foco Clinico FA2000Documento72 páginasFoco Clinico FA2000agnaldo de souza Malo100% (1)
- Atividade Pratica Controle ContinuoDocumento20 páginasAtividade Pratica Controle ContinuoLadson Josiana Pires100% (1)
- Projeto de Uma Esteira Transportadora para SacariasDocumento23 páginasProjeto de Uma Esteira Transportadora para SacariasGabriel MendesAinda não há avaliações
- 04 Lista Exercicios LEDZENERDocumento2 páginas04 Lista Exercicios LEDZENERJuliana AndradeAinda não há avaliações
- Corsa 1.0 - 1.6 - Pick Up MPFI y GL - GLS y WagonDocumento16 páginasCorsa 1.0 - 1.6 - Pick Up MPFI y GL - GLS y WagonfrancoAinda não há avaliações
- Abacar AmissedocxDocumento83 páginasAbacar AmissedocxRAFAEL JOSE MOLIDE JUNIORAinda não há avaliações
- Biblioteca 2015219 PDFDocumento87 páginasBiblioteca 2015219 PDFFranz C SchreiberAinda não há avaliações
- Artigo ATP EolicaDocumento6 páginasArtigo ATP EolicaGuilherme Henrique Bernardes CunhaAinda não há avaliações
- Relatório 1 - Eletrônica de PotênciaDocumento11 páginasRelatório 1 - Eletrônica de PotênciaThamira GomesAinda não há avaliações
- Modelagem Motor CCDocumento5 páginasModelagem Motor CCRicardo TironeAinda não há avaliações
- Unidade 1: Modelagem e Obtenção de Parâmetros de Um Motor CCDocumento15 páginasUnidade 1: Modelagem e Obtenção de Parâmetros de Um Motor CCRodolfo Brigatto FerreiraAinda não há avaliações
- TP4 Final - Turno 4 - Grupo 3Documento16 páginasTP4 Final - Turno 4 - Grupo 3footballmanager961Ainda não há avaliações
- Identificação de Parâmetros Do Motor CC PDFDocumento7 páginasIdentificação de Parâmetros Do Motor CC PDFHanzo HasashiAinda não há avaliações
- Pratica 6Documento5 páginasPratica 6PedroSartoriAinda não há avaliações
- ResumoDocumento10 páginasResumoDiogo LandiAinda não há avaliações
- Trabalho - ControleDocumento3 páginasTrabalho - ControleDouglas MagnusAinda não há avaliações
- Bancada de Testes Didática para Análise Dinâmica de Um Sistema de Transmissão Veicular Tipo CVTDocumento12 páginasBancada de Testes Didática para Análise Dinâmica de Um Sistema de Transmissão Veicular Tipo CVTFilipe CunhaAinda não há avaliações
- Modelagem Do MITDocumento15 páginasModelagem Do MITsalvatteAinda não há avaliações
- ControleVelocidadeMotorCC 2007Documento47 páginasControleVelocidadeMotorCC 2007AlyssonAlmeidaAinda não há avaliações
- Atividade 1Documento3 páginasAtividade 1João Pedro de Sousa CorrêaAinda não há avaliações
- Especificando Um Motor - Grupo 3Documento27 páginasEspecificando Um Motor - Grupo 3João Paulo AndradeAinda não há avaliações
- Modelo Matemático Motor CCDocumento14 páginasModelo Matemático Motor CCJones ArraesAinda não há avaliações
- Modelagem Matemática de Um Motor de Corrente Contínua e Apresentação de Suas Curvas CaracterísticasDocumento6 páginasModelagem Matemática de Um Motor de Corrente Contínua e Apresentação de Suas Curvas CaracterísticasJanderson Barbeito da SilvaAinda não há avaliações
- Relatório LAB3 MEDocumento8 páginasRelatório LAB3 MEguipedreiro21Ainda não há avaliações
- Relatório Conversores EletromecânicosDocumento7 páginasRelatório Conversores EletromecânicosMARCO THULIO ALVES MACIELAinda não há avaliações
- Atrito Viscoso de Um Motor CCDocumento4 páginasAtrito Viscoso de Um Motor CCRudnei BarbosaAinda não há avaliações
- Etapas de Dimensionamento de MotoresDocumento5 páginasEtapas de Dimensionamento de MotoresLázaro BindaAinda não há avaliações
- Estudo de Caso - Sistemas de Controle 1Documento24 páginasEstudo de Caso - Sistemas de Controle 1LEONARDO GOMES DA SILVAAinda não há avaliações
- Modelagem Motor CC PDFDocumento5 páginasModelagem Motor CC PDFVlauber CostaAinda não há avaliações
- 6 - 2 - Lab 3 - Laplace - Motor CCDocumento12 páginas6 - 2 - Lab 3 - Laplace - Motor CCEng WaltrichAinda não há avaliações
- Inocencio 035646Documento8 páginasInocencio 035646Flodio CunaAinda não há avaliações
- Rela To Rio Final EspDocumento31 páginasRela To Rio Final EspLuise CardozoAinda não há avaliações
- Relatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento22 páginasRelatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. Zucatelli100% (1)
- IR - Resolução Dos ExercíciosDocumento18 páginasIR - Resolução Dos ExercíciosMauricioAinda não há avaliações
- RelatórioDocumento30 páginasRelatórioemilyn cabralAinda não há avaliações
- Artigo Motor DC e PID AnalógicoDocumento9 páginasArtigo Motor DC e PID AnalógicolucapetaAinda não há avaliações
- Ensaio Motor CC PDFDocumento35 páginasEnsaio Motor CC PDFRogérioPaganiniValentini100% (4)
- Mecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCDocumento8 páginasMecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCMarcelo SilvaAinda não há avaliações
- Laboratà Rio 1Documento4 páginasLaboratà Rio 1Michael ZardoAinda não há avaliações
- TMM - Resumo para Aula Tema - 2.2-5-8Documento36 páginasTMM - Resumo para Aula Tema - 2.2-5-8Rafael Tobias Canalobuana CanalobuanaAinda não há avaliações
- Affonso Viccari Andre Sartoretto Lab 10Documento7 páginasAffonso Viccari Andre Sartoretto Lab 10André SartorettoAinda não há avaliações
- Análise de Um Circuito RLCDocumento51 páginasAnálise de Um Circuito RLCRaul FerreiraAinda não há avaliações
- Line Design 1Documento53 páginasLine Design 1RicardoAinda não há avaliações
- Relatório 3Documento8 páginasRelatório 3Larisa AlvesAinda não há avaliações
- Domingos Bernardo - F... P.A.T.Suspens - P.Maquinas 123Documento58 páginasDomingos Bernardo - F... P.A.T.Suspens - P.Maquinas 123abacar da rosa godinhoAinda não há avaliações
- Cap 2 - Dissertacao de Mestrado - Dante ShimodaDocumento30 páginasCap 2 - Dissertacao de Mestrado - Dante ShimodaDante ShimodaAinda não há avaliações
- Dinâmia de Máquinas e Mecanismos, Simulação ComputacionalDocumento16 páginasDinâmia de Máquinas e Mecanismos, Simulação ComputacionalLucas GonçalvesAinda não há avaliações
- Atividade Pratica Fator KDocumento20 páginasAtividade Pratica Fator KSTK StudioAinda não há avaliações
- Cópia Traduzida de F57aDocumento9 páginasCópia Traduzida de F57aandre ivoAinda não há avaliações
- 1 A ListaDocumento4 páginas1 A ListaCarol BandoliAinda não há avaliações
- 04.27 - Danilo Falsetta - E5Documento5 páginas04.27 - Danilo Falsetta - E5Stefanny Santos DiasAinda não há avaliações
- Correia Transportadora - DimensionamentoDocumento14 páginasCorreia Transportadora - DimensionamentoPlínio Rocha100% (1)
- Ensaio Motor InduçãoDocumento4 páginasEnsaio Motor InduçãoBruno MelloAinda não há avaliações
- PidDocumento23 páginasPidNatan Dos SantosAinda não há avaliações
- Atividade de Maquinas Eletricas 2Documento13 páginasAtividade de Maquinas Eletricas 2Jeferson Carvalho Valverde100% (1)
- Sistemas de Controle II - CompensadoresDocumento128 páginasSistemas de Controle II - CompensadoresGiovanna MisquitaAinda não há avaliações
- Apostila de Projeto Maquina Ferramenta 2011Documento45 páginasApostila de Projeto Maquina Ferramenta 2011Wigand JuniorAinda não há avaliações
- Atividade 2Documento5 páginasAtividade 2JOSE PEREIRA DE OLIVEIRA JUNIORAinda não há avaliações
- Calculos de Curtos-Circuitos em Sistema de DistribuiçãoDocumento15 páginasCalculos de Curtos-Circuitos em Sistema de DistribuiçãoIgor PROJAinda não há avaliações
- Implementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Implementando Um Soft-starter Com Base No Stm8s Programado No ArduinoNo EverandImplementando Um Soft-starter Com Base No Stm8s Programado No ArduinoAinda não há avaliações
- Implementando Um Conversor Mono->tri Com Base No Stm32 Programado No ArduinoNo EverandImplementando Um Conversor Mono->tri Com Base No Stm32 Programado No ArduinoAinda não há avaliações
- Dados de Placa CFW500 0,25 CV A 175 CVDocumento4 páginasDados de Placa CFW500 0,25 CV A 175 CVMatheus RodriguesAinda não há avaliações
- Dados de Placa w22 - para Redutor 0.16cvDocumento1 páginaDados de Placa w22 - para Redutor 0.16cvMatheus RodriguesAinda não há avaliações
- Folha de Dados - Motor Alternativo 10 CVDocumento6 páginasFolha de Dados - Motor Alternativo 10 CVMatheus RodriguesAinda não há avaliações
- Relatório 2Documento12 páginasRelatório 2Matheus RodriguesAinda não há avaliações
- ND20 - Rev04 - Dez 2015 PDFDocumento182 páginasND20 - Rev04 - Dez 2015 PDFRonaldo Garcia RodriguesAinda não há avaliações
- STEMAC Carenagem-Fechada 250kVADocumento2 páginasSTEMAC Carenagem-Fechada 250kVADanilloFAinda não há avaliações
- Chapman Electric Machinery Fundamentals 5th - Solutions Manual - GearTeamDocumento11 páginasChapman Electric Machinery Fundamentals 5th - Solutions Manual - GearTeamGuiAinda não há avaliações
- DownloadDocumento1 páginaDownloadKarina LopesAinda não há avaliações
- Atividades ALGETEC Laboratórios 5Documento27 páginasAtividades ALGETEC Laboratórios 5Felipe Anderson PenaAinda não há avaliações
- ARTIGO - Editado Os CálculosDocumento8 páginasARTIGO - Editado Os CálculosJosé Wilson Oliveira SilvaAinda não há avaliações
- 7SR10043KB202CA0 Datasheet PTDocumento2 páginas7SR10043KB202CA0 Datasheet PTThulio Nogueira FernandesAinda não há avaliações
- Atividade Prática Multimetro 2023Documento2 páginasAtividade Prática Multimetro 2023Raphael ViniciusAinda não há avaliações
- Memorial de CalculoDocumento5 páginasMemorial de CalculomateusbortoliniAinda não há avaliações
- JB-QB-5Ei Manual Sky Fire 5ei v.1.19 PDFDocumento57 páginasJB-QB-5Ei Manual Sky Fire 5ei v.1.19 PDFPedro PolitecAinda não há avaliações
- ELETROSTÁTICA - LISTA 5 - Aulas 08 e 09Documento8 páginasELETROSTÁTICA - LISTA 5 - Aulas 08 e 09Rodrigo PazAinda não há avaliações
- Datasheet Emsz 335p DG 01.20Documento5 páginasDatasheet Emsz 335p DG 01.20Aguinaldo JúniorAinda não há avaliações
- Trabalho de ElectroimanDocumento3 páginasTrabalho de ElectroimanBene Machapule100% (2)
- Lamina Tecnica Plataforma Elevatoria Ate 4 Metros - Meia Cabina (AC11) e Cabinada (AC08) eDocumento13 páginasLamina Tecnica Plataforma Elevatoria Ate 4 Metros - Meia Cabina (AC11) e Cabinada (AC08) eThiago CecconAinda não há avaliações
- Guia de Boas Praticas SwitchesDocumento10 páginasGuia de Boas Praticas SwitchesDiego AndersonAinda não há avaliações
- Azdoc - Tips Tutorial CLP Weg tp02Documento27 páginasAzdoc - Tips Tutorial CLP Weg tp02Diego MangiliAinda não há avaliações
- Manual Finger Duplo SinapseDocumento20 páginasManual Finger Duplo SinapseRonaldo Castro100% (1)
- 04 - Modelo Alta Frequência MOSFET - TBJDocumento64 páginas04 - Modelo Alta Frequência MOSFET - TBJJoão Marcelo Costa0% (1)
- Utilizando o Transistor Como Chave EletrônicaDocumento9 páginasUtilizando o Transistor Como Chave EletrônicaAntonio VenancioAinda não há avaliações
- UCM2811Documento7 páginasUCM2811Luiz BarrosAinda não há avaliações
- Manual UPSBR Mono 6-10kVADocumento15 páginasManual UPSBR Mono 6-10kVARafael CordeiroAinda não há avaliações
- Atron 2013 Fusíveis e RelésDocumento4 páginasAtron 2013 Fusíveis e RelésHelioAinda não há avaliações
- V-Vipysguvwh 1210498 - Superia 3000 d2 Instalador v2 InternetDocumento6 páginasV-Vipysguvwh 1210498 - Superia 3000 d2 Instalador v2 InternetMaq QuinalhaAinda não há avaliações