Você também pode gostar
- Fluxo de potência: Teoria e implementação de códigos computacionaisNo EverandFluxo de potência: Teoria e implementação de códigos computacionaisAinda não há avaliações
- Estudo de Caso - Sistemas de Controle 1Documento24 páginasEstudo de Caso - Sistemas de Controle 1LEONARDO GOMES DA SILVAAinda não há avaliações
- Modelagem Motor CCDocumento5 páginasModelagem Motor CCRicardo TironeAinda não há avaliações
- Proposta Charles Douglas Santos Machado - TCC - ECADocumento14 páginasProposta Charles Douglas Santos Machado - TCC - ECACharles MachadoAinda não há avaliações
- UFJSJ Relatório Eletrônica de Potência Motor CCDocumento8 páginasUFJSJ Relatório Eletrônica de Potência Motor CCMatheus RodriguesAinda não há avaliações
- Modelagem de circuitos e sistemas mecânicos no MATLAB/SimulinkDocumento7 páginasModelagem de circuitos e sistemas mecânicos no MATLAB/SimulinkJuscelino RodriguesAinda não há avaliações
- ControleVelocidadeMotorCC 2007Documento47 páginasControleVelocidadeMotorCC 2007AlyssonAlmeidaAinda não há avaliações
- Identificação de Parâmetros Do Motor CC PDFDocumento7 páginasIdentificação de Parâmetros Do Motor CC PDFHanzo HasashiAinda não há avaliações
- Relatório Máquina CCDocumento29 páginasRelatório Máquina CCAdrian AlanAinda não há avaliações
- Modelagem computacional de sistema eólico isolado via ATPDocumento6 páginasModelagem computacional de sistema eólico isolado via ATPGuilherme Henrique Bernardes CunhaAinda não há avaliações
- Modelagem e simulação de motor CC usando MatlabDocumento5 páginasModelagem e simulação de motor CC usando MatlabVlauber CostaAinda não há avaliações
- TMM - Resumo para Aula Tema - 2.2-5-8Documento36 páginasTMM - Resumo para Aula Tema - 2.2-5-8Rafael Tobias Canalobuana CanalobuanaAinda não há avaliações
- Artigo Motor DC e PID AnalógicoDocumento9 páginasArtigo Motor DC e PID AnalógicolucapetaAinda não há avaliações
- ResumoDocumento10 páginasResumoDiogo LandiAinda não há avaliações
- Acqa Sistema de ControleDocumento5 páginasAcqa Sistema de ControleWendel OliveiraAinda não há avaliações
- Cópia Traduzida de F57aDocumento9 páginasCópia Traduzida de F57aandre ivoAinda não há avaliações
- Condicionamento elétrico de motoresDocumento92 páginasCondicionamento elétrico de motoresGeorgia Vander100% (1)
- Maquina Corrente Continua Com Excitação IndependenteDocumento15 páginasMaquina Corrente Continua Com Excitação IndependenteTiago Martins100% (1)
- Apostila Projeto de Ponte RolanteDocumento59 páginasApostila Projeto de Ponte RolantePedro Rodrigues Figueiredo100% (5)
- Simulação de estabilidade transitória de sistema elétrico com geradores eólicos no MATLABDocumento31 páginasSimulação de estabilidade transitória de sistema elétrico com geradores eólicos no MATLABLuise CardozoAinda não há avaliações
- Controle de Portão ElétricoDocumento10 páginasControle de Portão ElétricoWILLIAN PATRICK DA SILVA RODRIGUESAinda não há avaliações
- Oficial 2Documento8 páginasOficial 2Filipe SantosAinda não há avaliações
- Função Transferência Motor CCDocumento12 páginasFunção Transferência Motor CCEng WaltrichAinda não há avaliações
- Exercicios Caracterizacao Sistemas Nao Lineares2Documento4 páginasExercicios Caracterizacao Sistemas Nao Lineares2FlavioAinda não há avaliações
- Atividade 1-Fluxo de Potência-2022-1Documento3 páginasAtividade 1-Fluxo de Potência-2022-1André SartorettoAinda não há avaliações
- Máquinas Síncronas RelatórioDocumento7 páginasMáquinas Síncronas RelatórioLucas RenanAinda não há avaliações
- Aprendizagem em FocoDocumento41 páginasAprendizagem em Focomacelo barrosAinda não há avaliações
- Motor CC avaliação 1Documento3 páginasMotor CC avaliação 1alan_smoAinda não há avaliações
- Características e Controle de Velocidade de Motores CCDocumento7 páginasCaracterísticas e Controle de Velocidade de Motores CClnetinholAinda não há avaliações
- Relatório 7. Simulação Psim. Lourençoo e GarciaDocumento11 páginasRelatório 7. Simulação Psim. Lourençoo e GarciaEdson LourençoAinda não há avaliações
- Modelagem Do MITDocumento15 páginasModelagem Do MITsalvatteAinda não há avaliações
- Acionamentos Elétricos na AutomaçãoDocumento13 páginasAcionamentos Elétricos na Automaçãojdionisio20120% (1)
- Motor CC: Modelagem e CurvasDocumento6 páginasMotor CC: Modelagem e CurvasJanderson Barbeito da SilvaAinda não há avaliações
- Resumo Do Artigo An Advanced STATCOM Model For Optimal Power Flows Using NewtonDocumento10 páginasResumo Do Artigo An Advanced STATCOM Model For Optimal Power Flows Using NewtonJOÃO VITOR MONTES PINHEIROAinda não há avaliações
- Mecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCDocumento8 páginasMecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCMarcelo SilvaAinda não há avaliações
- Atividade 2Documento5 páginasAtividade 2JOSE PEREIRA DE OLIVEIRA JUNIORAinda não há avaliações
- Relatório Conversores EletromecânicosDocumento7 páginasRelatório Conversores EletromecânicosMARCO THULIO ALVES MACIELAinda não há avaliações
- Relatorio 6Documento5 páginasRelatorio 6Felipe LucasAinda não há avaliações
- Diagramas de Comando - Parte 01Documento16 páginasDiagramas de Comando - Parte 01ArturJaekelAinda não há avaliações
- Eletricidade II - Lista de ExercíciosDocumento3 páginasEletricidade II - Lista de ExercíciosRaul SilvaAinda não há avaliações
- Motor CC 1a ListaDocumento2 páginasMotor CC 1a Listaed pwtAinda não há avaliações
- Actividade Práctica em Grupo 02 (Prazo de Entrega 03 04 2023)Documento6 páginasActividade Práctica em Grupo 02 (Prazo de Entrega 03 04 2023)Dj-Dénny DjrAinda não há avaliações
- Construção de curvas de capacidade de geradores síncronos usando MATLABDocumento8 páginasConstrução de curvas de capacidade de geradores síncronos usando MATLABLucas TozattiAinda não há avaliações
- MSD 23.2 - Lista de Avaliação 2Documento2 páginasMSD 23.2 - Lista de Avaliação 2Raylane MenezesAinda não há avaliações
- Modelo Matemático Motor CCDocumento14 páginasModelo Matemático Motor CCJones ArraesAinda não há avaliações
- Relatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento22 páginasRelatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. Zucatelli100% (1)
- Motores CC: tipos e características terminaisDocumento26 páginasMotores CC: tipos e características terminaisWagner MenezesAinda não há avaliações
- Conversão eletromecânica de energia: geradores e motores CCDocumento2 páginasConversão eletromecânica de energia: geradores e motores CCsoares.nguerra8634Ainda não há avaliações
- 1aLista_Documento4 páginas1aLista_Carol BandoliAinda não há avaliações
- Pratica 6Documento5 páginasPratica 6PedroSartoriAinda não há avaliações
- Controle de velocidade de máquina de indução trifásica no MatLab usando controle escalar V/fDocumento3 páginasControle de velocidade de máquina de indução trifásica no MatLab usando controle escalar V/fThiago OmenaAinda não há avaliações
- Novo Formato2Documento10 páginasNovo Formato2Jhonathan BispoAinda não há avaliações
- Motores CC: equações e controle de velocidadeDocumento10 páginasMotores CC: equações e controle de velocidadeJhonathan BispoAinda não há avaliações
- Servo MotorDocumento14 páginasServo MotorchnanduAinda não há avaliações
- Novo Formato4Documento10 páginasNovo Formato4Jhonathan BispoAinda não há avaliações
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViAinda não há avaliações
- OTIS PAX CAR DOOR MANUALDocumento17 páginasOTIS PAX CAR DOOR MANUALDrtesla100% (2)
- Manual Do Usuario POSITIVO DUO Q 432ADocumento40 páginasManual Do Usuario POSITIVO DUO Q 432AVictorAinda não há avaliações
- Selo LEEDDocumento183 páginasSelo LEEDDébora Raíssa MarçalAinda não há avaliações
- Area de Vivencia AssinadaDocumento4 páginasArea de Vivencia Assinadakeven cunhaAinda não há avaliações
- Evolução Dos Sistemas OperacionaisDocumento12 páginasEvolução Dos Sistemas OperacionaisRenalto da PazAinda não há avaliações
- Industria 4-0 Portugues Ind 2Documento17 páginasIndustria 4-0 Portugues Ind 2famigAinda não há avaliações
- Calculando rpm e gpmDocumento9 páginasCalculando rpm e gpmTayron CherigatoAinda não há avaliações
- Impactos Tecnologia ContabilidadeDocumento4 páginasImpactos Tecnologia ContabilidadeEwerlayne LimaAinda não há avaliações
- Placa de Tons Programáveis para Repetidores de V - UHFDocumento4 páginasPlaca de Tons Programáveis para Repetidores de V - UHFmario_smateusAinda não há avaliações
- TIM Black Família Planos Pós-Pagos Com 100GB + BenefíciosDocumento1 páginaTIM Black Família Planos Pós-Pagos Com 100GB + BenefíciosMariano SilvaAinda não há avaliações
- Servoválvulas e servocontroles: teoria e aplicaçõesDocumento95 páginasServoválvulas e servocontroles: teoria e aplicaçõesvini kiritoAinda não há avaliações
- História Tecnologia Educação: Do Lápis à WebDocumento28 páginasHistória Tecnologia Educação: Do Lápis à WebVeri AraújoAinda não há avaliações
- Apresentação - Técnica - Mohave - 2012 (Somente Leitura) (Modo de Compatibilidade)Documento18 páginasApresentação - Técnica - Mohave - 2012 (Somente Leitura) (Modo de Compatibilidade)Abraão Allison67% (3)
- Laudo Técnico LWE200Documento11 páginasLaudo Técnico LWE200SETE EngenhariaAinda não há avaliações
- Avaliação de NivelamentoDocumento2 páginasAvaliação de NivelamentoAmiraldotavaresAinda não há avaliações
- Curriculum Andre Guimaraes SouzaDocumento1 páginaCurriculum Andre Guimaraes SouzaAndré Guimarães de SouzaAinda não há avaliações
- MDJ - CapimbeDocumento20 páginasMDJ - Capimbemj8dt5w7j8Ainda não há avaliações
- Catálogo Stanley 2020Documento196 páginasCatálogo Stanley 2020Michael SilvaAinda não há avaliações
- 7310-5536 - Chicote Topper 4500 VT Geral - Rev. eDocumento3 páginas7310-5536 - Chicote Topper 4500 VT Geral - Rev. eGabriel GomesAinda não há avaliações
- Tendências Da Engenharia Civil 2023 - W42Documento24 páginasTendências Da Engenharia Civil 2023 - W42asm_engAinda não há avaliações
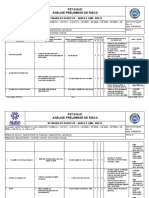
- APR 017 ABASTECIMENTO COM CAMINHÃO COMBOIO Rev ADocumento6 páginasAPR 017 ABASTECIMENTO COM CAMINHÃO COMBOIO Rev AEvandro FerreiraAinda não há avaliações
- Currículo Simples Profissional - Formação, Experiência, Cursos e HabilidadesDocumento3 páginasCurrículo Simples Profissional - Formação, Experiência, Cursos e Habilidadesleandrorafinha98Ainda não há avaliações
- Ep 3Documento2 páginasEp 3mirodekariAinda não há avaliações
- Aula1 DMCSMDocumento44 páginasAula1 DMCSMArnaldoAinda não há avaliações
- A indústria brasileira de rochas ornamentais: características, mercado e a bem sucedida indústria capixabaDocumento47 páginasA indústria brasileira de rochas ornamentais: características, mercado e a bem sucedida indústria capixabaVictor SilvaAinda não há avaliações
- 6.3.1.8 Packet Tracer - Exploring Internetworking DevicesDocumento4 páginas6.3.1.8 Packet Tracer - Exploring Internetworking DevicesPedro FrançaAinda não há avaliações
- Mastersafdfe 1Documento18 páginasMastersafdfe 1Jadson OlliveiraAinda não há avaliações
- IECEx - Destaques Reuniões Plenárias 2023Documento28 páginasIECEx - Destaques Reuniões Plenárias 2023Luciana SallesAinda não há avaliações
- Catalago Trator d150b New HollandDocumento569 páginasCatalago Trator d150b New HollandDaniel SpínolaAinda não há avaliações