Escolar Documentos
Profissional Documentos
Cultura Documentos
Netework RTK Mreze Konacno
Enviado por
Milan Galic MikiDescrição original:
Título original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Netework RTK Mreze Konacno
Enviado por
Milan Galic MikiDireitos autorais:
Formatos disponíveis
Geodezija i geomatika
SEMINARSKI RAD
-INTEGRISANI SISTEMI PREMERANetwork RTK rijeenja
Student: Nataa Mili
Br. Indeksa: GG 28-2011
Prof. dr Vladimir Bulatovi dipl.in
Asistent Dejan Vasi dipl.in
SADRAJ
1.
REZIMEIKLJUCNERIJEI....................................................................................1
2.
UVOD........................................................................................................................... 2
2.1 Koncept
2
Kinematika
3
3.
GPS
metoda
realnom
pozicioniranja
vremenu
RTK
NETWORKRTK...........................................................................................................5
3.1 Parametri
8
za
projektovanje
mrea
3.1.1 Udaljenostizmeureferentnihstanicaikonfiguracijamree..................8
3.1.2 Komunikacijaizmeucentrazaobraduikorisnika.................................9
3.2 Prenos
podataka
9
3.3 Virtuelna
referentna
stanica
9
3.3.1
3.3.2
Emitovanjekorekcija..................................................................................10
FormatikojekoristiVRSkoncept..............................................................11
3.4 FKP
koncept
(FLCHEN
KORREKTUR
PARAMETER)
13
3.5 MASTER
15
AUXILIARY
CONCEPT
(MAC)
3.6 i-Max
16
4.
Veze izmeumrenihrtkkoncepatavrs,FKP,macIIMAX...................................18
4.1 Korienje RTK I GPS za daljinski nadzor i kontrolu automatizacije
maina
19
5.
ZAKLJUAK................................................................................................................ 21
6.
LITERATURA.............................................................................................................. 22
Temanaslovrada
1. REZIMEIKLJUNERIJEI
U posljednjih nekoliko godina dokazano je kroz razne testove i aplikacije
da su rijeenja Network RTK superijornija u odnosu na rijeenja Baseline RTK.
Danas je RTK mrea sve vie prihvaena kao rezlog tome sve vei broj
organizacija uspostavlja mree pruajui isporuke od referentne stanice u
realnom vremenu.
Nekoliko konkurentskih RTK mrea postoji na tritu
ukljuujui MAC, VRS, iMax i FKP. Meutim veza izmeu RTK mrea rijeenja
nije jasno objanjena. U ovom prilogu MAC, VRS, i Max i FKP mree su
objanjene. Rezultati pokazuju da varijante svih rijeenja mrea RTK mogu biti
ostvarena korienjem standardizovnih MAC podataka. Meutim, nedostatak
standardizovanih definicija znai da su ostale realizacije takoe mogue.
Studija takoe pokazuje da su mrea i rover rijeenja povezani. Rover zahtijeva
intimno znanje o procesu primjenjenog mrenog softvera i kvaliteta informacija
mrenih korekcija u procesu pronalaenja optimalnog rijeenja. Meutim
nedostatak standardnih definicija za VRS, i-Max i FKP moe esto da dovede do
nesaglasnog modeliranja na roveru. U nekim sluajevima nesaglasno
modeliranje moe dovesti do znaajnih greaka u mjerenju koja mogu
negativno da utiu na poziciju rijeenja.
RTK
Network RTK
VRS
MAC
FKP
I-MAX
Veze izmeu NETWORK RTK
NetworkRTKrjeenja
2. UVOD
Globalni pozicioni sistem (Global Positioning System - GPS) je globalni
satelitski navigacioni sistem (Global Navigation Satellite System - GNSS),
rasprostranjen irom sveta, radi permanentno 24 sata dnevno a namenjen je
odreivanju navigacije, poloaja (pozicija) vremena, razvijen je u Sjedinjenim
Amerikim Dravama - odsek odbrane. Satelitski sistem iz kosmosa, emituje
specijalne kodirane signale, koje primaju i obrauju GPS prijemnici osposobljeni
da odreuju pozicije (poloaje), brzinu i vreme. Za praktinu primenu
neophodna su merenja rastojanja pomou GPS prijemnika do etiri satelita. Tri
merenja radi odreivanja koordinata u koordinatnom sistemu (X, Y, Z) i etvrto
radi odreivanja korekcije asovnika u GPS prijemniku (vreme T). Kod primene
u geodeziji pozicije se najee izraavaju u globalnom elipsoidnom sistemu pri
emu se odreuju tri veliine (, , h) gde je: geodetska irina, geodetska
duina i h geodetska (elipsoidna) visina. [1]
Slika br. 1 Merenje rastojanja GPS-om do etiri satelita
Globalni pozicioni sistem ima iroku primenu kao globalni servis u
razliitim komercijalnim i naunim oblastima. U poetku sistem je korien
iskljuivo u vojne svrhe a kasnije je stavljen na raspolaganje za civilnu
upotrebu. Postoji iroka primena u pozicioniranju i navigaciji: na moru, kopnu, u
vazduhu, zatim u geodeziji u oblasti, premera, kartografije, geografskim
informacionim sistemima, praenju pomeranja zemljine kore, odrivanju tanog
vremena i drugim oblastima. [1]
2.1
KonceptGPSpozicioniranja
Pod pozicioniranjem se podrazumeva odreivanje prostornih poloaja
stacionarnih ili mobilnih objekata. Principijelno posmatrano postoje dve vrste
pozicioniranja:
1. apsolutno pozicioniranje ili pozicioniranje take i
2. relativno pozicioniranje ili diferencijalno pozicioniranje. [1]
Apsolutno pozicioniranje ili pozicioniranje take Podrazumjeva
korienje jednog prijemnika kojim se mjere rastojanja do satelita pomou
2
NetworkRTKrjeenja
kodova. Poloaj prijemnika (take), odnosno tri kartezijanske koordinate
(X,Y,Z) se odreuju u terestrikom sistemu koji je vezan za Zemlju (Earth
Centered Earth FixedECEF), tj. WGS84. Ne nalazi ozbiljniju primenu za
potrebe geodezije. Postoji statiko i kinematiko apsolutno pozicioniranje.
Statiko se koristi kada se trai tanost koja reda 10m tako da ova metoda
ne spada u metode poveane tanosti. Kratko je vreme opaanja.
Kinematiko se koristi za odreivanje putanje kretanja objekta (3D). Loe je
tanosti, reda nekoliko desetina metara, a primena se svodi na prblinu
navigaciju i praenju pokretnih objekata.
Relativno pozicioniranje ili diferencijalno pozicioniranje- poloaj se
odreuje u odnosu na neku taku, koja se usvaja kao poetak lokalnog
koordinatnog sistema. Ovaj vid pozicioniranja nalazi sve iru upotrebu u
geodeziji razvojem tehnologija GPS-a jer je daleko tanija od apsolutne
metode. Podrazumeva primenu najmanje dva prijemnika kojima se vri
opaanje na iste satelite (kodno ili fazno). Koordinate jedne take su poznate
dok se koordinate druge take ocenjuju relativno u odnosu na prvu (ocenjuje
se vektor izmeu dve take).
Postoji vie vrsta relativnog pozicioniranja i to:
Statika Najpreciznija metoda. Princip: oba prijemnika su
nepokretna. Period merenja od 20 minuta do nekoliko sati u zavisnosti od
potrebne tanosti i projekta na kojem se radi tako da se moe postii tanost
reda nekoliko centimetara.
Brza statika metoda - Preciznost od nekoliko centimetara do
nekoliko decimaetara. Princip: Jedan prijemnik nepokretan (baza), drugi se
kree (rover). Period merenja od 2 do 10 minuta, a izmeu merenih taaka
rover moe biti iskljuen.
Reokupaciona metoda Preciznost reda centimetra. Princip:Jedan
prijemnik je baza, dok je drugi rover. Ima slinosti sa brzom statikom s tom
razlikom da se ista taka meri barem dva puta, sa vremenskim razmakom od
oko jednog asa, a sam period merenja take je oko 10 minuta.
Stani-kreni metoda - centimetarske preciznosti. Princip: Jedan
prijemnik nepokretan, drugi se kree. Pre poetka merenja rover se mora
inicijalizovati. Ukoliko rover prestane iz nekog razloga da prati satelite,mora
se izvriti reinicijalizacija. Merenje svake take je oko 30 sekundi.
Kinematika metoda u naknadnoj obradi (Post processing)
Vea preciznst u odnosu na kinematiku u realnom vremenu. Princip
korienja ove metode je isti kao i za kinemtiku u realnom vremenu s tom
razlikom to je podaci dobijaju nadnadnom obradom podataka sa terena u
kancelariji, i to je due vrijeme inicijalizacije rovera (unoenje poetnog
poloaja od strane operatera ili GPS-a).
KinematikametodaurealnomvremenuRTK
RTK pozicioniranje je efektivno sredstvo za aplikacije koje zahtijevaju
veliku preciznost , preciznost na nivou centimetra. RTK metoda podrazumijeva
korienje dva prijemnika baznog i pokretnog koji su u neprestalnoj radio vezi.
Bazni prijemnik se postavlja na poznatu stanicu i statian je za vrijeme
premjera. Radio prijemnik povezan na njega emituje podatke za diferencijalnu
3
NetworkRTKrjeenja
korekciju. U tom periodu rover se kree od take do take zaustavljajui se
radi kratkih opaanja na tim takama. Za vrijeme snimanja se prima i signal
sa bazne stanice i na osnovu primljenih podaraka rauna se GPS vekror od
stajne take. To je mogue i u pokretu, gdje e priemnik automatski
registrovati GPS signale.
Otvoreni i prohodni prostori najpogodniji su za kinematiku metodu. Za
vrijeme kretanja izmeu taaka prijemnici ne smiji da se gase i zahtijevaju
stalnu vidjivost najmanje etiri satelita, te se ne moe koristiti u regionima
gdje povremeno postoje prepreke u prijemu signala. [2]
Mjerenje RTK podrazumijeva postupak odreivanja horizontalnog i
vertikalnog poloaja taaka detalja za potrebe izrade i odrzavanja premijera.
Tanost konvencionalne opada sa poveanjem udaljenosti zbog prostorne
redukcije autokorekcije na disperzivnim i nedisperzivnim grekama izazvanim
od strane jenosfere i troposfere respektivno. U zavisnosti od preovlaivajuih
atmosferskih uslova operativni domet konvencionalnog RTK poziciniranje je
obino oganieno na nekoliko desetina kilometara. Na slici br. 3 je prikazana
RTK metoda. [2]
Slika br. 2 RTK metoda
U geodetskom premeru apsolutno pozicioniranje veoma se rijetko koristi
zbog slabe tanosti, a relativno pozicioniranje ima potpunu primenu zbog
visoke tanosti pozicioniranja. Metode naknadne obrade podataka (Post
Processing Kinematic-PPK) i metode u realnom vremenu (Real Time KinematicRTK) ravnopravno su zastupljene u premeru kao jednako tane.
Osnovna prednost RTK je to podatke dobijamo u realnom vremenu i
moemo odmah da uoimo greke i nepravilnosti u mjerenjima. Pa mijerenja
moemo odmah ponoviti. Nema naknadne obrade i sve to doprinosi utedi
vremena i novca.[1]
Pozicije mogu biti odreene na razliite naine pomou razliitih
instrumenata, sistema instrumenata ili tehnologija. Pozicija se odreuje u
odnosu na koordinatni sistem, najee geocentrini, u odnosu na neku taku,
ili u odnosu na skup taaka koji ine geodetsku mreu. Uopteno podela
globalnog pozicionog sistema moe se izvriti prema nameni na dve oblasti
primene: geodetski premer i navigacija. (slika br. 3) [1]
4
NetworkRTKrjeenja
Slika br. 3 Podela GPS-a
3. NETWORKRTK
Mrea RTK je tehnologija koja sazrijeva i koja ima potencijal da savlada
nekoliko ogranienja osnovnih konvencijalnih signala RTK. Mree RTK su poeli
da se pojavljuju 2003. godine. Spolja gledano izgledaju kao RTK klaster. RTK
mree pruaju mrene korekcije R zasnovane n veini ili svim referentnim
stanicama na mrei. Mrea RTK-a zahteva preporueni minimum od pet
referentnih stanica ( nema maksimum ) sa inter - stanice razmak do 70 km .
Referentne stanice su obino stalne instalacije i formiraju RTK mreu , koja je
okosnica principa mree RTK. Princip Netvork RTK poinje sa svim referentnim
stanicama u okviru RTK- mree , kontinuirano prenosi satelitska zapaanja na
centralni server koji radi softver Network RTK , kao to je Leica GNSS Spider.
Cilj Netvork RTK je da se minimizira uticaj greaka koje zavise od udaljenosti
rovera, raunajui poziciju unutar granica mree. [2]
Prednosti NETWORK RTK su:
Nema potrebe za uspostavljanjem baznih stanica
Tanosti prorauna pozicije rovera su su homogeni
Preciznost se odrava na veim rastojanjima izmeu referentnih
stanica i rovera
Isti prostor moe biti pokriven sa manje referentnih stanica (tj u
odnosu na broj stalnih stanica koje su potrebne za pomenu RTK )
Via pouzdanost i dostupnost RTK korekcije ( npr jedna stanica
padne , druga stanica moe preuzeti ).
Nedostaci NETWORK RTK su:
Cijena pristupa RTK mrei i preuzimanje RTK korekcije. [2]
NetworkRTKrjeenja
Slika br. 4 Princpip NRTK
Tipini RTK model se sa sastoji od tri ili vie trajnih referentnih stanica
povezanih sa centralnim postrojenjem za obradu koja procijenjuje velinu
zavisnosti greaka kroz mreu. Korekcije ovih greaka se kombinuju sa
svijeim zapaanjima referentne stanice i distribuiraju se korisnicima u polju.
Mrene informacije pomau da se ublai veliina zavisnosti greaka irom
mree rezultujui veom homogenou pozicione tanosti i efektivno
poveanje operativnog dometa rovera.
ta vie, konvencialna lokalna
referenta stanica nije vie neophodna . Koncept mree RTK je komercijalno
dokazan skoro za deceniju i naravno postoji nekoliko konkurentskih rijeenja
na tritu ukljuujui MAC, VRS, FKP i i-MAX. Uprkos razlikama u njihovom
nainu rada, svi NETWORK RTK modeli imaju zajedniki cilj. Njihov cilj je
dokazivanje pozicionih performansi pozicioniranja rovera u poreenju sa
konvencijalnom RTK. Koraci ukljueni u mreu RTK su iroko prikazani na slici
br. 5. [3]
NetworkRTKrjeenja
Slika br. 5 Opti procesi ukljueni u Network reenja
U sluaju VRS, i-MAX mreni softver rauna korekcije za zavisnu
udaljenost greaka prikupljenih na roveru. Korekcije su primjenjene kao svijee
prikupljene na glavnoj referentnoj stanici kako bi se formirala virtuelna ili
nefizika referentna stanica zapaanja koja se onda emituju do korisnika.
Optimalne korekcije su izvedene od modela zavisne udaljenosti greaka
izraunatih pomou mrenog softvera.
U FKP modu zapaanja glavne
referentne stanice nisu ispravljena. Umijesto toga i parametri modela zavisne
udaljenosti greaka se emituju do korisnika zajedno sa svijeim sa glavne
stanice zapaanja. Rover softver primjenjuje korekcije zavisne udaljenosti
greaka izvedenih iz modela za emitovanje. Modeli zavisne udaljenosti
greaka su izvedena iz procijene disperznih i nedisperznih greaka prikupljenih
na mrenim stanicama . Tipino , ove procijene su izvedene iz nedvosmislene
faze noseeg zapaanja. U MAC modu procijene disperznih i nedisperznih
greaka se emituju do korisnika same sa svijeim zapaanjima sa glavne
stanice. Rover softver odluuje kako da modulira zavisne udaljenosti greake i
kako da primjenjuje ove procijene u poziciono rijeenje.
Cilj RTK metode jeste da minimizira uticaj greaka zavisnih od
udaljenosti od rovera, unutar granica neke mree Network RTK NRTK daje
redundantnost referentnih stanica u prostoru, tako da ako opaanja sa jedn
referentne stanice nisu dostupna, uvek postoji reenje jer se opaanja
prikupljaju u obrauju u zajednikim podeavanjima mree. Na slici br. 7
prikazan je odnos zavisnosti greaka od udaljenosti i njihovih stvarnih
vrednosti. U ovom sluaju, NRTK daje greku koja nastaje od greaka sa tri
referentne stanice. (aviona) Stvarna promena greke prikazana je crvenom
bojom. [3]
NetworkRTKrjeenja
Slika br. 7 Odnos izmeu greaka zavisnih od udaljenosti i njihovih stvarnih
vrednosti
Ako se korisnik nalazi u blizini neke stanice, pod pretpostavkom da
imaju isti nivo greke, te stanice e dati razumnu tanost i rezultate sa malim
grekama. Kako se korisnik udaljava od stanice, raste i greka.
U pricnipu, Network RTK sastoji se iz 4 osnovna segmenta:
1. Prikupljanje podataka sa referentnih stanica
2. Manipulacija podacima i generisanje ispravki na mrei obradni
centar
3. Emitovanje ispravki
4. Pozicioniranje na rover primenom informacija od NRTK. [3]
3.1
Parametri za projektovanje mrea
Uspostavljanje RTK mree obino poinje od nakon temeljne analize
trokova, odnosno koristi. Priliom analize, u obzir treba uzeti sledee faktore:
3.1.1
Rastojanja izmeu referentnih stanica i konfiguracija mree ( broj i
gemetrijska raspodela referentnih stanica)
Postupak komunikacije izmeu raunarskog centra i korisnika
Proraun potreban za kontrolu mrea od strane korisnika (takozvani
mreni algoritam) [3]
Udaljenostizmeureferentnihstanicaikonfiguracijamree
Glavna prednost priszupa mrei jeste ta to poboljava modelovanje u
zavisnosti od udaljenosti. Glavni tehniki izazov u NRTK jeste vieznanost u
razumno, ro kraem roku za velika rastojanja izmeu referentnih stanica. Da
bi se postigla to bolja tanost, rastojanje izmeu referentnih stanica ne bi
smelo da bude vee od 100km. (Trebalo bi da rastojanje bude izmeu 20100km, ulavnom 70km) Da bi se raunale mrene korekcije, potrebno je da
postoje minimum 3 rreferentne stanice, dok taj broj u praksi ne bi trebalo da
bude manji od 5. Stepen redundatnosti treba ocenjivati na osnovu analize
trokova/koristi. Izbor bazne linij zavisi od sledeih uslova:
8
NetworkRTKrjeenja
Pokrivanje podruja od interesa
Odravanje vika stanica
Postizanje pouzdane vieznanosti rezlucije sa prihvatljivim nivoom
poverenja u svaoj taki mree, ako je vidljivo najmanje 5 satelita.
Obezbeenje pouzdane komunikacije izmeu raunarskog centra
korisnika. [3]
3.1.2
Komunikacijaizmeucentrazaobraduikorisnika
RTK aplikacije zahtevaju vezu za komunikaciju izmeu usluga i korisnika.
Trenutno postoje 2 glavna naina komunikacije koji se mogu upotrebiti u mrei
RTK:
DVOSMERNI PROTOKOL
JEDNOSMERNI PROTOKOL
Prilikom izbora naina komunikacije treba razmotriti ekonomske faktore.
Tehniki apekti koje treba obezbediti su: oekivana jaina signala na
razliitim lokacijama, broj korisnika, opseg i pokrivenost, propusni opseg,
protokol i latence (neophodne za cm tanost). Trenutno je vie u upotrebi
dvosmerni protokol. Koristi se GPRS ili GSM mobilni sistem. Poeljniji za
upotrebu je GPRS sistem jer je ekonominiji korisnik plaa samo za primljene
podatke, a ne i vreme trajanja poziva kao kod upotrebe GSM-a. GPRS moe da
obezbedi stabilnu vezu sa latencama za manje od 1s. Ovaj princip ima
ogranien broj korisnika jer NRTK istovremenoo vri proraune za sve
korisnika. Ukoliko je broj korisnika oranien, ovo kanjnje je manje od 3s.
Komunikacija u jednom smeru preteno koristi VHF ili UHF emitovanje ili kodira
RTK korekcije u zvuk. Kod upotrebe VHF radio-difuzije dobijanje odgovarajue
frekvencijeje ranije predtsvljalo problem. Osnovna prednost ovog protokola
jeste da ne postoji ogranienje u broju korisnika. Glavni nedostatak je visoka
cena infrastrukture potrebne za izgradnju repetitora koji bi pokrivao signalom
celu oblast od interesa. [3]
3.2
Prenospodataka
Prenos podataka izmeu referentnih stanica i kontrolnog centra i od
kontrolnog centra do korisnika, uglavnom se vri preko mree. Prenos se vri
rimenom RTCM - NTRIP formata.
NTRIP je opensource , pa se kao takav moe pronai na internetu i svi
korisnici ga mogu upotrebljavati. NTRIP koristi HTTP protokol i sastoji se od 3
komponente:
NTRIP klijent
NTRIP server
NTRIP cluster.
NTRIP je dizajniran za slanje diferencijalnih korekcija u RTCM formatu. (ili
u nekom drugom. Da bi se smanjilo kanjenje, koliina podatka koju je
potrebno slati sa rovera se smanjuje na minimum. [3]
9
NetworkRTKrjeenja
3.3
Virtuelnareferentnastanica
Virtuelna referentna stanica (VRS) je mreni standard koji
podrazumijeva dvosmjernu komunikaciju rovera i mree.Servis je dostupan
samo u mreama iji je centralna programska jedinica definisana paketom
programa kompanije Trimble.Ovaj servis se moe koristiti u sistemu
permanentnih stanica Srbije. Servis je mogue koristiti ako su sve stanice
direktno povezane ka kontrolnom centru i sa permanentnih stanica stiu sve
informacije.Temelji se na injenici da se preciznost mjerenja poveava sa
smanjivanjem rastojanja izmeu referentne stanice i rovera.Za realizaciju
ovog standarda potrebno je minimum tri referentne stanice koje su povezane
sa serverom preko komunikacionog linka.Potrebno je obezbijediti i
komunikacioni link od rovera ka serveru. [5]
(1)
Formula 1 prikazuje raunanje rastojanja izmeu satelita i odgovarajuemaster stanice, gde su:
Rjs rastojanje od satelita do master stanice
Ris rastojanje od satelita do VRS
Formati poruka koji se koriste su standardni :
Od rovera ka serveru NMEA
Od servera ka roveru RTCM
Po ukljuivanju rovera i prijavljivanja na mreu, rover alje serveru
priblinu poziciju u poruci koja je u NMEA formatu.Na osnovu pribline pozicije
rovera, server pomou arhiviranih podataka sa tri stanice najblie roveru
generie virtuelnu stanicu u blizini rovera (svega nekoliko metara). Potom
server roveru kontinuirano alje RTCM poruke koje rover vidi kao da su poslate
sa virtuelne stanice.Primjenom VRS principa ,moe se postii tanost od 2 cm
pri RTK pozicioniranju. [5]
10
NetworkRTKrjeenja
Slika br. 8 Trimble VRS koncept
3.3.1
Emitovanjekorekcija
Server koristi VRS poziciju da kreira korigovane podatke u
formatu RTCM
Rover radi normalno kao da dobija podatke u odnosu na virtuelnu
baznu
taku
VRS. [5]
Slika br. 9 Slanje korekcija prijemniku
11
NetworkRTKrjeenja
3.3.2
FormatikojekoristiVRSkoncept
1. RTCM je standardan format za emitovanje diferencijalnih korekcija u
realnom vremenu. Tipino vreme emitovanje jednog RTCM zapisa
podataka (data record) je 1 sekund. Svaki zapis je podeljen na
nekoliko poruka, a svaka poruka na zaglavlje i telo poruke. Tip poruke,
informacija o vremenu, ID referentne stanice, duina poruke, kao i i
druge informacije o kontroli stanja, kodiraju se i smetaju u zaglavlje
poruke. Telo poruke se sastoji od relevantnih operativnih podataka za
svaki tip poruke. Duina poruke zavisi od tipa podataka. Razvijen je od
strane RTCM Special Committee 104 Global Navigation Satelite
System (GNSS) [5]
Svi poznati GNSS signali opisuju se primenom RINEX standard. MSM se
koristi da predstavi uoljivosti za sve poznate GNSS signale u obliku binarne
RTCM poruke. MSM je dizajniran tako da pokrije maksimalnu kompatibilnost
sa RINEX formatom, proirenje RTCM poruka, univerzalnost za sve poznate
GNSS signal, kompaktnost prezentacije, fleksibilnost i sklabilnost i jednakost
za RTK i PPK. Organizacija MSM poruke je pogodna za potpuno rasporeeni
GNSS, gde svaki satelit prenosi isti set signala. Prvobitno osmiljena,
generika struktura MSM je osmiljena kao deo RTCM formata. Postoji nada da
e se MSM u budunosti koristiti u RTK ali i u PPK obradi podataka. Postojei
RTCM standard poruke ne moe da generie podatke za nove bendove i GPS,
ali MSM moe. [4]
Slika br. 10 Struktura i organiyacija MSM poruke [6]
2. NMEA - National Marine Electronics Association standard je razvijen
kao specifikacija koja definie interfejs izmeu razliitih vrsta
mornarike elektronske opreme. Podaci sadre kompletnu procenu
poloaja, brzine i vremena odreenu od strane GPS prijemnika. Ideja
NMEA formata je slanje nizova podataka koji se nazivaju reenice,
koje su potpuno nezavisne i samostalne u odnosu na druge
reenice. Sve standardne reenice imaju dvoslovni prefiks koji
12
NetworkRTKrjeenja
definie ureaj koji koristi taj tip reenice (za GPS prijemnike ovaj
prefiks glasi GP), za kojim sledi sekvenca od tri slova koja definie
sadraj reenice. Trenutno aktuelna verzija standarda je 3.01
(objavljena januara 2002). [5]
Slika br. 11 VRS koncept
Koncept VRS omoguava korienje korekcija odreenih na osnovu vie
VRS, kontinualno praenje integriteta podataka referentne stanice, formiranje
modela za otklanjanje uticaja sistematskih greaka (jonosfere, troposfere,
satelitskih orbita, refleksije), refleksije, kreiranje jedinstvene virtuelne
referentne stanice na svakoj korisnikoj lokaciji i isporuka obraenih podataka
ka pokretnim prijemnicima u odreenim formatima.
Prednosti VRS drastino smanjenje sistematskih greaka, poveana
tanost, poveana produktivnost, jedan operator je dovoljan, manje
investicije u opremu, nije potrebna lokalna bazna stanica, potpuna kontrola
kvaliteta, mogunost alarmiranja, svi korisnici koriste isti koordinatni okvir,
nema zavisnosti od jedne take, jedan telefonski broj za pristup svih
korisnika istovremeno, koristi postojeu infrastrukturu mobilne telefonije,
Virtuelne Referentne Stanice za naknadnu obradu, generie GNSS podatke za
korisnika kao da dolaze od lokalne bliske referentne stanice, omoguava
primenu kompleksnih atmosferskih modela u raunskom centru, korisnik
mora emitovati svoju priblinu poziciju kontrolnom centru (neophodan je
dvosmerni komunikacioni link), korisnik ne treba da koriguje sopstvene
podatke, komercijalni proizvod: Trimble Virtual Reference Station [5]
3.4
FKP koncept - (FLCHEN KORREKTUR PARAMETER)
FKP je nemaka skraenica za termin prostorno-mrene korekcije.
Predstavlja jednu realizaciju emisionog reima rada permanentnih stanica,
standardizovanu od strane SAPOS komiteta (SAtellitenPOSitionierungsdienst)
u Nemakoj. Prijemnik na terenu prima poruku sa korekcijama od najblie
13
NetworkRTKrjeenja
referentne stanice. Poruka se emituje u formatu RTCM 2.3 tip 59, i sadri
korekcije uticaja atmosfere i efemerida. Nije meunarodni standard. Podrano
od samo nekoliko proizvoaa opreme (npr. prijemnici Trimble 5700 i 5800).
Koeficijenti prostornog modela za atmosferu raunaju se u kontrolnom centru i
emituju se ka korisnicima Jednosmerna komunikacija je dovoljna. Zahteva se
nov format podataka. Preporuuje se kao mreni format - RTK RTCM od Leica i
Geo++.
Slika br. 12 FKP koncept
(2)
U formuli 2 prikazan je postupak raunanja prostornih reziduala
varijacija, gde su:
a,b,c, - koeficijenti
, geografske koordinate interpolovane take
R, R geografske koordinate referentne stanice
Nakon odgovarajueg postupka raunanja, dolazi se do konanih
korekcija, koje su date u formuli 3.
(3)
Za predstavljanje poloaja zavisnih greaka koristi se FKP koncept. FKP
koncept odnosi se na povr koja je definisana tako da bude paralela sa
elipsoidom WGS 84 u visini referentne stanice. Poto trenutna verzija RTCM
ne podrava informacije od umrenih referentnih stanica, pa se FKP poruke
moraju prenositi putem poruke tipa 59. (Slika br. 13) [6]
14
NetworkRTKrjeenja
Slika br. 13 Deo strukture poruke tipa 59
3.5
MASTER AUXILIARY CONCEPT (MAC)
Koncept (MAC) MASTER AUXILIARY CONCEPT (Glavni - pomoni
koncept) je razvila kompanija Leica Geosystems 2001. godine. Osnova
koncepta je pretpostavka da su rastojanja sa referentnih stanica
odreena
faznim merenjima redukovana na zajedniki nivo neodreenosti,
odnosno da se celobrojna neodreenost za svaki par prijemnik satelit
eliminie
kad
se
na
njih
primeni princip dvostrukih razlika. Kad je ovaj uslov zadovoljen mogue
je
raunati
popravke
uticaja
greaka,
za
svaki
par
prijemniksatelit i za svaku frekvenciju. Ove korekcije se u celini emituju
samo sa jedne stanice u mrei. Ova stanica se naziva glavna ili
master stanica. Za ostale stanice se raunaju razlike korekcija i ove stanice
se nazivaju pomonim stanicama ili auxiliary stations. Kako su razlike
korekcija mali brojevi oni se mogu predstaviti sa manjim brojem bita, te je i
poruka koja sealje roveru manja.
Informaciju o razlici korekcija rover moe koristiti da:
Interpolira vrednost greke na svojoj lokaciji
15
NetworkRTKrjeenja
Da rekonstruie kompletnu korekciju sa svih stanica mree
Master stanica ne mora biti stanica koja je najblia roveru. Omoguava
diferencijalne korekcije disperzivnih i ne-disperzivnih podataka po paru
satelit-prijemnik (neodreenost reena u mrei). Napomena: korekcije za
Master stanicu; diferencije za pomonu stanicu. Mogua jednosmerna ili
dvosmerna komunikacija (Leica MAX ili i-MAX). Za slanje poruka koristi se
RTCM 3.0 format.
Slika br. 14 MAC struktura
Primenom formula 4, 5 i 6 prikazan
neodreenosti, neophodan za ovaj koncept.
je
postupak
raunanja
(4)
(5)
(6)
U MAC pristupu, rover alje svoju poziciju primenom NMEA formata do
obradnog centra. Centar utvruje master stanicu i to je obino najblia stanica
do refrentne i koja identifikuje pomone referentne stanice. Ove stanice se
biraju u krugu prenika oko 70km oko rovera, a sa unapred definisanim
brojem referentnih stanica. U jednom MAC konceptu, mreni RTK velikog broja
moe se podeliti u klastere obradni centar definie odgovarajui klaster za
korisnika I definie odgovarajue mrene korekcije koje se odnose na tog
korisnika.
16
NetworkRTKrjeenja
Slika br. 15 Master i pomone referentne stanice
MAC je jedina meunarodno priznata stndardizovana mrea RTK. MAC je
jedina metoda koja daje roveru kontrolu da rauna zavisnu udaljenost greke i
ispravi je samostalno, znai da roveru moe usvojiti proraune i determinisati
ih potrebne. MAC metoda je najnaprednija metoda kada su u pitanju mrene
informacije. -MAC metoda koristi jedino informacije dobijene sa realnih
stanica.[7]
3.6
i-Max
I-MAX Metoda Individualizirani I-MAX je razvijen u isto vrijeme kada iMAX da podri starije prijemnike koji ne mogu podrati Max korekcije.
Metode i-MAX i VRS su sline. Obe su klasifikovane kao individualne i
zahtijevaju rover za slanje pribline pozicije na server. Odnos izmeu servera
i rovera za I-MAX su prikazane na slici br. 16. [7]
Slika br. 16 Veza izmeu servisa i rovera primenom i-MAX metode
17
NetworkRTKrjeenja
Obe metode su nestandardizovane. Obe metode koriste neobjavljene
algoritme za generisanje network RTK korekcija, stoga su nestandardizovane.
U oba metoda server izraunava mrena rijeenja za smanjenje rastojanja
zavisnih od gresaka. Ovo znai da mrena rijernja nisu optimalna za pozicije
rovera, i mogu biti ograniena RTK rijenjima. Oba naina stvaraju RTK
korekcije koje simuliraju jednu referencu RTK. Ovo ograniava raspoloivost
satelitskih podataka za rover, dakle rizikuje se da u odreenim okolnostima
RTK rjeenje nee biti mogue. Glavna razlika je u tome da i-Max metoda
kreirana za pravu referentnu stanicu umijesto za virtuelnu referentnu stanicu.
U sluaju VRS i-MAX mreni softver rauna korekcije za zavisnu udaljenost
greaka prikupljenih na roveru. Korekcije su primjenjene kao svijee
prikupljene na glavnoj referentnoj stanici kako bi se formirala virtuelna ili
nefizika referentna stanica zapaanja koja se onda emituju do korisnika. [7]
KOREKCIJE:
Optimialne korekcije izvedene od modela zavise od udaljenosti greaka
izraunatih pomou mrenog softvera. U FKP modu zapaanja glavne
referentne stanice nisu ispravljena. Umijesto toga i parametri modela zavisne
udaljenosti greaka se emituju do korisnika zajedno sa svijeim zapaanjima
sa glavne stanice. Rover softver primjenjuje korekcije zavisne udaljenosti
greaka izvedenih iz modela za emitovanje. Modeli zavisne udaljenosti
greaka su izvedena iz procijene disperznih i nedisperznih greaka prikupljenih
na mrenim stanicama .
Tipino , ove procijene su izvedene iz nedvosmislene faze noseeg
zapaanja. U MAC modu procijene disperznih i nedisperznih greaka se
emituju do korisnika sa svijeim zapaanjima sa glavne stanice. Rover softver
odluuje kako da modulira zavisne udaljenosti greake i kako da primjenjuje
ove procijene u poziciono rijeenje. Neki autori tvrde da FKP metoda
prenoenja mrene korekcije izaziva neznatne greke, koje su zanemarljive. A
VRS moe uvesti veoma znaajne greke zbog pretpostavke o toposferskom
modelu. FKP parametri su prebrojani od preostale razlike izmeu referentnih
stanica. Da bi se prebrojao ovaj ostatak mi moramo primjeniti orbitalne
informacije i toposferski model. Bez primjene toposferskog modela ne bi bilo
mogue popraviti nedoumice o mrei. S obzirom da mi nemamo stvarne
meteoroloke podatke na referentnim stanicama mi smo primorani da radimo
sa standardnim atmosferskim podacima u mrenom softveru. Nesigurnost
troposferskog modela e uticati da tok izraunavanja kombinacija nema
potpunog smisla. S obzirom da mi trimo jedino razlike izmeu referentnih
stanica mrea korekcija ukljuuje samo relativan nagib istine i koritenog
topografskog modela. Ako su VRS i FKP brojani na isti nain i po istom modelu
uticaj e biti isti. [7]
Bitno je zapamtiti:
MAC je jedina meunarodno priznata stndardizovana mrea RTK. MAC je
jedina metoda koja daje roveru kontrolu da rauna zavisnu udaljenost greke i
ispravi je samostalno, znai da roveru moe usvojiti proraune i determinisati
ih potrebne. MAC metoda je najnaprednija metoda kada su u pitanju mrene
informacije. -MAC metoda koristi jedino informacije dobijene sa realnih
stanica. I-Max je najbolje individualizovana reirana RTK metoda .
i-Max
je razvijen za starije prijemnike koji nisu mogli da podre MAC .
18
NetworkRTKrjeenja
i-Max, FKP, VRS se ne podudaraju sa filozofijom RTCM industrijom standarda
formata zato to poruke kao to poruke sadre modelirane podatke,a ne
svijee kao to je standardom RTCM-a propisano.
Laica GPS 1200 sistem e uvijek obezbijediti najbolje mogue perfomanse u
okviru osnovnih ogranienja ispravki za VRS, FKP i i-Max, ta vie mogu se
dobiti performanse i za MAC.
4. VEZE IZMEUMRENIHRTKKONCEPATAVRS,FKP,MAC
IIMAX
Sva network RTK rijeenja dijele zajedniki cilj, koji je da dokau
odnosno poboljaju performanse pozicioniranja rovera u odnosu na klasinu
RTK. Razliiti network RTK modeli su definisani pre obrade iznosom koji se
primjenjuje u mrenom softveru.
Slika br. 17 Veza izmeu VRS, MAC, FKP I i-MAX koncepta
MAC se moe smatrati kao generalno rijeenje RTK mree. Realizacija
svih vidova mree moe biti izvedena iz MAC-a. Kako su standardne definicije
metoda koritene da generiu podatke o mrei RTK modela osim ako MAC nije
dostupan, obrnute transformacije nisu mogue. Na primjer disperzivne ili
nedisperzivne korekcione razlike mrenih stanica ne mogu biti rekonstruisane
od FKP modela kako nema informacije o stanicama i modelima koji su bili
koriteni da generiu gradijent informacije. Ovo takoe podrazumijeva da
razliito ponaanje realizacije VRS, i-MAX i FKP softvera moe da varira.
Takoe moemo vidjeti kako su network RTK i rover ispreplitani. U cilju
izvlaenja optimanog pozicionog rijeenja rover zahtijeva znanje o metodama
i modelima za primjenu od strane mrenog softvera . U sluaju
MAC modela
zaostale greke mogu biti prebrojane kao nus-proizvodi modeliranja. U drugim
mrenim modelima, procijene preostalih greaka moraju biti emitovane
upotrebom standardnih RTCM V3.1 poruka. Meutim, nedostatak standardnog
opisa za VRS,FKP i i-MAX mogu esto da dovedu neke nedosljedne greke u
modeliranju, kao na primjer u troposferi ili na roveru. U specijalnim
sluajevima u skladu sa modeliranjem mogue je uvesti znaajne greke koje
mogu i negativno da utiu na pozicione performanse. Uprkos ovim
19
NetworkRTKrjeenja
ogranienjima fabriki rover ima uspijeno integrisanje mrea RTK informacija
u rover softveru koje poboljavaju uinak pozicioniranja u odnosu na
konvencionalne osnove RTK. [8]
Primeri dijagrama greaka (upotreba razliitih koncepata):
1. FKP koncept
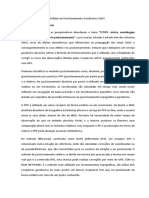
Slika br. 18 Kvalitet pozicioniranja upotrebom FKP koncepta (slika levo
planimetrijska greka) i (slika desno greka u visini) [9]
2. MAC koncept
Slika br. 19 Kvalitet pozicioniranja upotrebom MAC koncepta (slika levo
planimetrijska greka) i (slika desno greka u visini) [9]
4.1
Korienje RTK I GPS za
daljinski nadzor i
kontrolu
automatizacije maina
NRTK ima veliku primjenu u graevinarstvu, poljoprivredi,
elektrotehnici,
vazduhopl ovstvu i mnogim drugim disciplinama, u
nastavku ce biti objanjeno korienje RTK za automatizaciju maina.
20
NetworkRTKrjeenja
Upotreba GNSS pozicioniranja u relanom vremenu za automatizaciju
maina moe da obezbedi veu funkcionalnost I produktivnost. GNSS
pozicioniranje u realnom vremenu moe da obezbedi cm tanost. NadzorniSCADA system je dobar primer za podrku automatizovanog sistema. Imajui
u realnom vremenu tane informacije GNSS pozicioniranja kao ulaz u SCADA
system, dolazi s3 do puno mogunopsti za razvoj mnogih reenja, kao to su
planiranje I rpojektovanje, praenje operacija koje zahtevaju precizno
pozicioniranje maina (bager, traktor).Za softver SAD, kao standard se koristi
IEC1131-3 to predstavlja Meunarodni standard za programiranje kontrolera
jezika.
Proces automatizacije moe biti u 2 scenarija:
Slika
RTK
Poluautomatizovani reim sa online kontroom. U relanom vremenu
se vri GNSS pozicioniranje I primenom GIS sistema se iz
kontrolnog centra upravlja mainom.
Automatizovani reim radi na principu prethodnog podeavanja ili
automatizovane integracije sa bazom podataka.
br. 20
Integrisani
GNSS
sistem i
SCADA
sistem
21
NetworkRTKrjeenja
5. ZAKLJUAK
Tokom izrade ovog rada, najvie panje je posveeno mrenom RTK
konceptu. Pored toga, u uvodnom delu rada opis je GPS sistem, kao i metode
pozicioniranja koje podrava pomenuti sistem.
Nakon to je detaljno opisan mreni RTK koncept, njegove prednosti I
mane, prelo se na opis modela ovog koncepta. Pod modelima podrazumevaju
se VRS, FKP, MAC i iMac koncepti.
Virtuelna referentna stanica (VRS) je mreni standard koji podrazumijeva
dvosmjernu komunikaciju rovera i mree.Servis je dostupan samo u mreama
iji je centralna programska jedinica definisana paketom programa kompanije
Trimble.Ovaj servis se moe koristiti u sistemu permanentnih stanica Srbije.
FKP je nemaka skraenica za termin prostorno-mrene korekcije.
Predstavlja jednu realizaciju emisionog reima rada permanentnih stanica,
standardizovanu od strane SAPOS komiteta (SAtellitenPOSitionierungsdienst) u
Nemakoj.
Koncept (MAC) MASTER AUXILIARY CONCEPT (Glavni - pomoni koncept)
je razvila kompanija Leica Geosystems 2001. godine. Osnova koncepta je
pretpostavka da su rastojanja sa referentnih stanica odreena faznim
merenjima redukovana na zajedniki nivo neodreenosti, odnosno da se
celobrojna neodreenost za svaki par prijemnik satelit eliminie kad se na njih
primeni princip dvostrukih razlika.
I-MAX Metoda Individualizirani I-MAX je razvijen u isto vrijeme kada i-MAX
da podri starije prijemnike koji ne mogu podrati Max korekcije.
Nakon detaljnog razmatranja RTK mrenog koncepta, dolazi se do
zakljuka da je Mrea RTK tehnologija koja sazrijeva i koja ima potencijal da
savlada nekoliko ogranienja osnovnih konvencijalnih signala RTK.
22
NetworkRTKrjeenja
6.LITERATURA
[1]
Prakna geodezija; K. Vraari, I.R. Aleksi; Beograd, 2007.
[2]
System 1200 Newsletter No. 53 RTK Networks Different
MethodsLaica
Geosistems
Available
from:
http://incors.in.gov/System1200_53_RTK_Networks_
_The_Different_Methods.pdf
[3]
Precise Real-Time Positioning
www.cdn.intechopen.com
[4]
The RTCM Multiple Signal Messages: A New Step in GNSS Data
Standardization from: www.ssl29.pair.com
[5]
Virtual Reference Stations versus Broadcast Solutions in Network
RTK - Advantages and Limitations, Herbert Landau, Ulrich Vollath,
Xiaoming
Chen,
Available
from
http://citeseerx.ist.psu.edu/viewdoc/download?
doi=10.1.1.194.7890&rep=rep1&type=pdf
[6]
RTCM Message Type 59FKP for transmission of FKP
www.gopp.de
[7]
System 1200 Newsletter No. 53 RTK Networks Different
Methods
,Available
from
http://incors.in.gov/System1200_53_RTK_Networks__The_Different_Methods.pdf
[8]
The Relationship Between Network RTK Solutions MAC, VRS , PRS,
FKP and i-MAX , Frank Takac, Oliver Zelzer Leica Geosystems ,
Available
from
http://www.nottingham.ac.uk/~iszgwr/PDF%20of
%20Rngps10a/05%20GWR/Background/f1.3.
[9]
Achievable Positioning Accuracies in a Network of GNSS Reference
Stations from: http://cdn.intechweb.org/
Using
Network
RTK
from:
from:
23
Você também pode gostar
- Introduç o Do SistemaDocumento4 páginasIntroduç o Do SistemaMalate MiltonAinda não há avaliações
- Metodos e Medidas de Posicionamento - GNSS - TIAGO PONTEDocumento2 páginasMetodos e Medidas de Posicionamento - GNSS - TIAGO PONTETiago CoelhoAinda não há avaliações
- 10 LAR Cap09 Sist Naveg EletrDocumento16 páginas10 LAR Cap09 Sist Naveg Eletrfernandocordeiro.engAinda não há avaliações
- GPS Método RelativoDocumento10 páginasGPS Método RelativoRafael ThomasAinda não há avaliações
- 36 GPS Sistema de Posionamento GlobalDocumento6 páginas36 GPS Sistema de Posionamento GlobalMalate MiltonAinda não há avaliações
- Fontes de Erros Que Influenciasm Na Medida GNSS - TIAGO PONTEDocumento1 páginaFontes de Erros Que Influenciasm Na Medida GNSS - TIAGO PONTETiago CoelhoAinda não há avaliações
- Topografia Periodo 1Documento8 páginasTopografia Periodo 1Juliano MullerAinda não há avaliações
- Apostila de GPS - Curso Sig@Livre SistêmicoDocumento19 páginasApostila de GPS - Curso Sig@Livre SistêmicoDeivid Magano100% (1)
- 2.1 Os Levantamentos Por SatélitesDocumento18 páginas2.1 Os Levantamentos Por SatélitesStella KarolayneAinda não há avaliações
- Topografia e Geotecnia Parte 2Documento1 páginaTopografia e Geotecnia Parte 2paulo.jrsfAinda não há avaliações
- Conceitos FundamentaisDocumento3 páginasConceitos FundamentaisMalate MiltonAinda não há avaliações
- Leitura Complementar 2 - PoligonalDocumento5 páginasLeitura Complementar 2 - PoligonalBaiano NerdAinda não há avaliações
- Pesquisa GpsDocumento11 páginasPesquisa GpsPaulo OlmedoAinda não há avaliações
- Trabalho de EquinavDocumento8 páginasTrabalho de EquinavMalate MiltonAinda não há avaliações
- Introdução Ao GPS PDFDocumento3 páginasIntrodução Ao GPS PDFBruno Gindri100% (1)
- Apresentacao GPSDocumento17 páginasApresentacao GPScavaco511Ainda não há avaliações
- Aula+2 Tecnologias+de+Suporte+à+Cartografia Parte+1 V5Documento73 páginasAula+2 Tecnologias+de+Suporte+à+Cartografia Parte+1 V5izabelladribeiroAinda não há avaliações
- Diferenca Entre GPS e Estacao TotalDocumento5 páginasDiferenca Entre GPS e Estacao TotalThiago MarianoAinda não há avaliações
- Técnicas de Posicionamento GPSDocumento5 páginasTécnicas de Posicionamento GPSMatheus-eLarissaBraziellasAinda não há avaliações
- Levantamento Topografico Com GPS DiferencialDocumento14 páginasLevantamento Topografico Com GPS DiferencialAzevedo Marcelino100% (1)
- Metodos e Medidas de Posicionamento Geodesico Gnss Unidade IVDocumento27 páginasMetodos e Medidas de Posicionamento Geodesico Gnss Unidade IVAndre RibeiroAinda não há avaliações
- Métodos de PosicionamentoDocumento53 páginasMétodos de PosicionamentoDellins CardosoAinda não há avaliações
- Equipamentos TopogDocumento15 páginasEquipamentos TopogHelder DiogoAinda não há avaliações
- Slides de Aula GNSSDocumento28 páginasSlides de Aula GNSSGilvan JuniorAinda não há avaliações
- Glossário de GPSDocumento17 páginasGlossário de GPSInalina MarcioAinda não há avaliações
- Orientação GPSDocumento11 páginasOrientação GPSLuiz Arlindo KohlerAinda não há avaliações
- Exercícios 1 - Geoprocessamento-1 Com RespostaDocumento4 páginasExercícios 1 - Geoprocessamento-1 Com RespostaUilma Resplande da SilvaAinda não há avaliações
- Métodos e Medidas de Posicionamento Geodésicos GNSSDocumento2 páginasMétodos e Medidas de Posicionamento Geodésicos GNSSDiogo CorreaAinda não há avaliações
- Resumo Técnicas de Levantamento TopográficoDocumento2 páginasResumo Técnicas de Levantamento TopográficoKellem AzevedoAinda não há avaliações
- Faculdade de Ciências Departamento de Matemática e InformáticaDocumento16 páginasFaculdade de Ciências Departamento de Matemática e InformáticaYoung LieAinda não há avaliações
- Tarefa 4.1Documento3 páginasTarefa 4.1EdioneiAinda não há avaliações
- Sistema GPSDocumento61 páginasSistema GPSFabiano BandeiraAinda não há avaliações
- Avaliacao Da Qualidade Das Efemerides Transmitidas Dos Satelites Gps T059Documento14 páginasAvaliacao Da Qualidade Das Efemerides Transmitidas Dos Satelites Gps T059Ricardo Rodrigues de AraujoAinda não há avaliações
- A Utilizacao Da Tecnolgia RTK NtripDocumento13 páginasA Utilizacao Da Tecnolgia RTK NtriprufuelAinda não há avaliações
- GPSDocumento3 páginasGPSGilmara Lima100% (1)
- Tarefa 4.1 TextoDocumento3 páginasTarefa 4.1 TextoWillian FrançaAinda não há avaliações
- FEAMIG - Metodos de Posicionamento GNSSDocumento70 páginasFEAMIG - Metodos de Posicionamento GNSSRodrigo Yoshiaki Kuriyama100% (2)
- Estação Total Ts11 X Gps RTK Gs15 - Relatório FinalDocumento7 páginasEstação Total Ts11 X Gps RTK Gs15 - Relatório FinalRodolfo MotaAinda não há avaliações
- Aula 08 - GNSS-GPSDocumento30 páginasAula 08 - GNSS-GPSVinicius Teixeira100% (1)
- GPSDocumento3 páginasGPSGIS GFIAinda não há avaliações
- GPS v1 1Documento63 páginasGPS v1 1Erikson MatosAinda não há avaliações
- Global Positioning SystemDocumento2 páginasGlobal Positioning SystemWellington Vargas GomesAinda não há avaliações
- Teste Comparativo Entre Coordenadas Calculadas Pelo Problema de POTHENOT e As Coordenadas Obtidas Com o Uso de GPSDocumento36 páginasTeste Comparativo Entre Coordenadas Calculadas Pelo Problema de POTHENOT e As Coordenadas Obtidas Com o Uso de GPSCarlos MonteiroAinda não há avaliações
- Fontes de Erros Que Influenciam Na Medida GNSSDocumento2 páginasFontes de Erros Que Influenciam Na Medida GNSSDiogo Correa80% (5)
- Como Funciona o GPSDocumento7 páginasComo Funciona o GPSBruna AbadeAinda não há avaliações
- 06-GPS e Protocolo NMEADocumento18 páginas06-GPS e Protocolo NMEAVinicius NogueiraAinda não há avaliações
- Instrumentos TopograficosDocumento12 páginasInstrumentos TopograficosoperigrinoAinda não há avaliações
- Erros GpsDocumento7 páginasErros GpsFátima NunesAinda não há avaliações
- Métodos Geofisicos ExperimentaisDocumento54 páginasMétodos Geofisicos ExperimentaisAnonymous KbM6WrPz100% (1)
- Atividade 4 KarinaDocumento3 páginasAtividade 4 KarinaEng.Maiara Karina PosseAinda não há avaliações
- SLIDES Uni IIDocumento41 páginasSLIDES Uni IILuis Gustavo G AmaralAinda não há avaliações
- Tarefa 4Documento3 páginasTarefa 4Edionei75% (8)
- Apostila GPS OutraDocumento10 páginasApostila GPS OutraZé RalevaAinda não há avaliações
- Norma Operacional Basica de Recursos Humanos Do SUAS NOB-RH SUASDocumento69 páginasNorma Operacional Basica de Recursos Humanos Do SUAS NOB-RH SUASMolina CleberAinda não há avaliações
- Sistema de Posicionamento GlobalDocumento19 páginasSistema de Posicionamento GlobalEduarda MirthyzAinda não há avaliações
- Sistema GpsDocumento18 páginasSistema GpsMalate MiltonAinda não há avaliações
- Prtica 22 - Levantamento Com Receptor GPS de NavegaoDocumento1 páginaPrtica 22 - Levantamento Com Receptor GPS de NavegaoMant SAinda não há avaliações
- Exercícios GeodésiaDocumento13 páginasExercícios GeodésiabojjisAinda não há avaliações