Você também pode gostar
- Guia de Nutricao para o FisiculturismoDocumento42 páginasGuia de Nutricao para o FisiculturismoRafael Pestano92% (38)
- Ativ. Adaptadas Ciências - 3º AnoDocumento88 páginasAtiv. Adaptadas Ciências - 3º AnoAninha Ribeiro100% (3)
- Herdeiro Rebelde - Vi KeelandDocumento247 páginasHerdeiro Rebelde - Vi KeelandEdna TorresAinda não há avaliações
- Apostila Arduino Basico V1.0 EletrogateDocumento44 páginasApostila Arduino Basico V1.0 EletrogateGleison Aparecido OnofreAinda não há avaliações
- Ficha-Lei de KirchhoffDocumento13 páginasFicha-Lei de Kirchhofflagostinha100% (2)
- Textos Metabolismo - Nutrição2Documento30 páginasTextos Metabolismo - Nutrição2Marcos100% (1)
- Geradores e Leis de KirchhoffDocumento13 páginasGeradores e Leis de KirchhoffRomerio Ribeiro da SilvaAinda não há avaliações
- MACETES de FísicaDocumento40 páginasMACETES de FísicaLuciana Martins De Sousa Teles Correia100% (1)
- Bombas e estações elevatórias: tipos e funcionamentoDocumento52 páginasBombas e estações elevatórias: tipos e funcionamentoPedro BrondaniAinda não há avaliações
- Cálculo IMC e ciclos cutting/contestDocumento1 páginaCálculo IMC e ciclos cutting/contestMarcos100% (1)
- Cálculo IMC e ciclos cutting/contestDocumento1 páginaCálculo IMC e ciclos cutting/contestMarcos100% (1)
- Física II Calorimetria GabaritoDocumento20 páginasFísica II Calorimetria GabaritoFlavio BaccAinda não há avaliações
- Lista de Equilibrio Do Corpo ExetensoDocumento6 páginasLista de Equilibrio Do Corpo ExetensoMateus Manhani100% (2)
- ENEM Simulado de Matemática BásicaDocumento14 páginasENEM Simulado de Matemática BásicaLorena Marcelino100% (1)
- Procedimentos Administrativos Na ExportaçãoDocumento42 páginasProcedimentos Administrativos Na ExportaçãoJonas Corassa100% (1)
- Mecânica Quântica PostuladosDocumento21 páginasMecânica Quântica PostuladosDenise Jacqueline SchereiberAinda não há avaliações
- Motores de Indução: Lista de Exercícios e ConceitosDocumento15 páginasMotores de Indução: Lista de Exercícios e ConceitosGabriel Ramon de BritoAinda não há avaliações
- Movimento circular uniforme: grandezas angulares e relações fundamentaisDocumento8 páginasMovimento circular uniforme: grandezas angulares e relações fundamentaisRonaldo da Costa CunhaAinda não há avaliações
- Pcmso - Log Brasil - 2021Documento31 páginasPcmso - Log Brasil - 2021David Augusto0% (1)
- Física - Dicas Fórmulas IIDocumento10 páginasFísica - Dicas Fórmulas IIFísica Concurso Vestibular100% (10)
- Questões de Física - José Roberto BonjornoDocumento118 páginasQuestões de Física - José Roberto BonjornoMonica Fig0% (1)
- Manual técnico de bombas e motobombas SchneiderDocumento50 páginasManual técnico de bombas e motobombas SchneiderFernando AlmeidaAinda não há avaliações
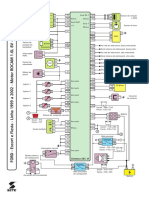
- FORD Escort Fiesta Linha 1999 A 2002 Motor ROCAM 1.6L 8V Sistema EEC VIDocumento1 páginaFORD Escort Fiesta Linha 1999 A 2002 Motor ROCAM 1.6L 8V Sistema EEC VICristianoAinda não há avaliações
- Experimento 3 RelatorioDocumento6 páginasExperimento 3 RelatorioDinizAinda não há avaliações
- Gabarito 06 - Exercicio de Fixação 06 - CapacitorDocumento6 páginasGabarito 06 - Exercicio de Fixação 06 - CapacitorDaniel Silva De OliveiraAinda não há avaliações
- Física QuânticaDocumento60 páginasFísica QuânticaMarcos MacedoAinda não há avaliações
- Eletricidade Básica 03 - Corrente Contínua (Exercícios Resolvidos)Documento100 páginasEletricidade Básica 03 - Corrente Contínua (Exercícios Resolvidos)Josué Fortes Dorneles100% (4)
- 59,37 Aderir Aderir 15,52 : Quanto Tenho A Pagar? Débito Na Minha Conta A Partir deDocumento3 páginas59,37 Aderir Aderir 15,52 : Quanto Tenho A Pagar? Débito Na Minha Conta A Partir deRose Mery de Jesus GomesAinda não há avaliações
- Circuitos Lógicos PráticosDocumento11 páginasCircuitos Lógicos PráticosJose Wilson Soares Do NascimentoAinda não há avaliações
- Ficha Avaliação EL - Robinson Crusoe - (Correção)Documento4 páginasFicha Avaliação EL - Robinson Crusoe - (Correção)Patrícia Valente100% (1)
- Simulado SAEP - Partida de motores e circuitos elétricosDocumento20 páginasSimulado SAEP - Partida de motores e circuitos elétricosdanielfortalAinda não há avaliações
- Lista 6 - TorçãoDocumento5 páginasLista 6 - TorçãoSamuel Corazza Junges0% (1)
- Transformações Gasosas e Lei Dos GasesDocumento217 páginasTransformações Gasosas e Lei Dos GasesEsdras Santos de Oliveira100% (1)
- Mecânica Vibratória - Modelo Mola-MassaDocumento29 páginasMecânica Vibratória - Modelo Mola-MassaedsonguitarAinda não há avaliações
- Força hidrostática planaDocumento37 páginasForça hidrostática planaguilhermenq201350% (4)
- Dinâmica II - Cinemática plana de corpos rígidosDocumento381 páginasDinâmica II - Cinemática plana de corpos rígidosMarcosAinda não há avaliações
- Lista 2Documento5 páginasLista 2Eduardo LedurAinda não há avaliações
- Física 12a classe resumo 6a aula impulso quantidade movimentoDocumento3 páginasFísica 12a classe resumo 6a aula impulso quantidade movimentoJerónimo LourençoAinda não há avaliações
- TCC - Utilização de Pastilhas Peltier para Retirar Calor Do Ambiente Microprocessado (TINOCO, Wellington) PDFDocumento62 páginasTCC - Utilização de Pastilhas Peltier para Retirar Calor Do Ambiente Microprocessado (TINOCO, Wellington) PDFwellingtonAinda não há avaliações
- Experiência-1 - OsciloscopioDocumento7 páginasExperiência-1 - OsciloscopioThalis CaixetaAinda não há avaliações
- Estatica Dos Fluidos ExercicosDocumento26 páginasEstatica Dos Fluidos ExercicosFernando TorresAinda não há avaliações
- Força e EquilíbrioDocumento8 páginasForça e EquilíbrioAlexandre PrudencioAinda não há avaliações
- Análise de ondas não-senoidais via série de FourierDocumento45 páginasAnálise de ondas não-senoidais via série de FourierLeonardo Pinheiro100% (1)
- A Transformação de LorentzDocumento25 páginasA Transformação de LorentzIgor LambertAinda não há avaliações
- Exercícios sobre fundamentos de máquinas elétricasDocumento7 páginasExercícios sobre fundamentos de máquinas elétricasdanielfortalAinda não há avaliações
- Díodo SemicondutorDocumento40 páginasDíodo SemicondutorJmariros JmAinda não há avaliações
- Estática Exercícios Física 40NDocumento5 páginasEstática Exercícios Física 40NRaphael VictorAinda não há avaliações
- Relatório Sobre CapacitoresDocumento29 páginasRelatório Sobre Capacitorestumor_guitarrista5361Ainda não há avaliações
- Máquinas de Indução: Construção, Conceitos e Escorregamento do RotorDocumento30 páginasMáquinas de Indução: Construção, Conceitos e Escorregamento do RotorWagner Menezes100% (1)
- Relatório Sobre Carga e Descarga Do CapacitorDocumento15 páginasRelatório Sobre Carga e Descarga Do CapacitorlaertonAinda não há avaliações
- Propriedades termodinâmicas de gases e vaporesDocumento4 páginasPropriedades termodinâmicas de gases e vaporesJessica Guedes QueirozAinda não há avaliações
- Transformadores: indução e tensãoDocumento17 páginasTransformadores: indução e tensãoCleison Freitas100% (1)
- MHS partícula origem velocidadeDocumento4 páginasMHS partícula origem velocidadeLeonardo Ferreira100% (1)
- Relatório Física 2 - Oscilador Harmonico AmortecidoDocumento6 páginasRelatório Física 2 - Oscilador Harmonico AmortecidofabioelerAinda não há avaliações
- Circuitos Polifasicos PDFDocumento50 páginasCircuitos Polifasicos PDFedmilson GeroAinda não há avaliações
- Lista de Exercícios de Circuitos ElétricosDocumento11 páginasLista de Exercícios de Circuitos Elétricosmucambo100% (1)
- Ensaio Motor CC PDFDocumento35 páginasEnsaio Motor CC PDFRogérioPaganiniValentini100% (4)
- Resolução Maquinas Eletricas Fitzgerald Edição 7 Capitulo 7 - Passei DiretoDocumento11 páginasResolução Maquinas Eletricas Fitzgerald Edição 7 Capitulo 7 - Passei DiretoLeandro Souza de FreitasAinda não há avaliações
- Movimentos planosDocumento24 páginasMovimentos planosDenivaldo Oliveira Santos100% (1)
- Quantidade de movimento e Impulso de uma forçaDocumento4 páginasQuantidade de movimento e Impulso de uma forçaCLAUDIO MARIANO SILVAAinda não há avaliações
- Forças e Pressões em Equilíbrio MecânicoDocumento3 páginasForças e Pressões em Equilíbrio MecânicoRui MoreiraAinda não há avaliações
- Lista Exercícios RelatividadeDocumento2 páginasLista Exercícios RelatividadeAllanAinda não há avaliações
- PUCMINAS - Exercícios de Resistência dos Materiais IDocumento1 páginaPUCMINAS - Exercícios de Resistência dos Materiais IGabriel Palhares Girao100% (2)
- Ufmg 2011 Etapa 2 Resolução6Documento12 páginasUfmg 2011 Etapa 2 Resolução6Daniel Aguiar ZivianiAinda não há avaliações
- Capacitores elétricos: conceitos e aplicaçõesDocumento5 páginasCapacitores elétricos: conceitos e aplicaçõesLais GermanoAinda não há avaliações
- Movimento harmônico simplesDocumento6 páginasMovimento harmônico simplesDarkArkangel2100% (1)
- Questões Sobre Diodo Boylestad Cap IDocumento9 páginasQuestões Sobre Diodo Boylestad Cap Ityrone pinheiroAinda não há avaliações
- Mola constante elásticaDocumento26 páginasMola constante elásticaDiego AzevedoAinda não há avaliações
- Faculdade Pitágoras de Teixeira de Freitas atividade sala aula termodinâmicaDocumento2 páginasFaculdade Pitágoras de Teixeira de Freitas atividade sala aula termodinâmicaRodrigo Mota40% (10)
- Termodinâmica de gás idealDocumento13 páginasTermodinâmica de gás idealDaniel HenriqueAinda não há avaliações
- Movimento circular uniformemente aceleradoDocumento8 páginasMovimento circular uniformemente aceleradoCLAUDIO REINKEAinda não há avaliações
- FG1 2022 Ficha6Documento2 páginasFG1 2022 Ficha6Team TeaAinda não há avaliações
- Exercícios de Dinâmica de Partículas e Corpos RígidosDocumento5 páginasExercícios de Dinâmica de Partículas e Corpos RígidosVictorAinda não há avaliações
- Física Geral I - Cinemática do ponto materialDocumento3 páginasFísica Geral I - Cinemática do ponto materialfisnunes4447Ainda não há avaliações
- Medicos Cassi em ItaperunaDocumento2 páginasMedicos Cassi em ItaperunaMarcosAinda não há avaliações
- Bulking Dieta 05Documento1 páginaBulking Dieta 05MarcosAinda não há avaliações
- Apostila Metalurgia SoldagemDocumento13 páginasApostila Metalurgia SoldagemJulio Cezar RibeiroAinda não há avaliações
- APS 2 - Ponte MetálicaDocumento10 páginasAPS 2 - Ponte MetálicaMarcosAinda não há avaliações
- Calculo Estrutural Cadeiras EscolaresDocumento22 páginasCalculo Estrutural Cadeiras EscolaresMarcosAinda não há avaliações
- 05 - Metrologia - Micrômetro - Sistema InglêsDocumento22 páginas05 - Metrologia - Micrômetro - Sistema InglêsMarcosAinda não há avaliações
- Catalogo ANANDA Isolamento TermicoDocumento8 páginasCatalogo ANANDA Isolamento TermicoMarcosAinda não há avaliações
- Catalogo2015 SITEDocumento26 páginasCatalogo2015 SITEMarcosAinda não há avaliações
- Aula 3 - 2015 - Ciclo Diesel e DualDocumento9 páginasAula 3 - 2015 - Ciclo Diesel e DualMarcosAinda não há avaliações
- Resistência Dos Materiais I - Gabarito APS 1Documento5 páginasResistência Dos Materiais I - Gabarito APS 1MarcosAinda não há avaliações
- Novo Manual de Formatação de TCC EditadoDocumento34 páginasNovo Manual de Formatação de TCC EditadoMarcosAinda não há avaliações
- 007Documento1 página007MarcosAinda não há avaliações
- Aula 5 - Eom II - Engrenagens Cilíndricas de Dentes HelicoidaisDocumento37 páginasAula 5 - Eom II - Engrenagens Cilíndricas de Dentes HelicoidaisMarcosAinda não há avaliações
- Dieta e Treino Abcd AlineDocumento2 páginasDieta e Treino Abcd AlineMarcosAinda não há avaliações
- Os Fatores de Localização e Distribuição Das IndústriasDocumento37 páginasOs Fatores de Localização e Distribuição Das IndústriasL Antonio Savino Athayde100% (1)
- GABcp 2 APROF2016 AFIMQUADRAula 1Documento8 páginasGABcp 2 APROF2016 AFIMQUADRAula 1RafaelLaurentinoAinda não há avaliações
- SerDocumento8 páginasSerDiego BeckAinda não há avaliações
- Formação do solo e seus fatoresDocumento8 páginasFormação do solo e seus fatoresDouglas AlexandreAinda não há avaliações
- Spink - Frezza - Práticas DiscursivasDocumento23 páginasSpink - Frezza - Práticas DiscursivasClara RodriguesAinda não há avaliações
- Guia Corrimão DuploDocumento12 páginasGuia Corrimão DuploAndre VidalAinda não há avaliações
- AfmszezecinskiDocumento159 páginasAfmszezecinskiKarian LeaoAinda não há avaliações
- Oncocercose em animais: revisão de aspectos clínicosDocumento19 páginasOncocercose em animais: revisão de aspectos clínicosSaulo DuckyAinda não há avaliações
- IbamaDocumento17 páginasIbamaanon_700777709Ainda não há avaliações
- Frater Achad - 31 Hinos A Deusa Das Estrelas (PT)Documento18 páginasFrater Achad - 31 Hinos A Deusa Das Estrelas (PT)Caléu N. MoraesAinda não há avaliações
- De JudIIJEF 2020 09 15 ADocumento401 páginasDe JudIIJEF 2020 09 15 AShayene RibeiroAinda não há avaliações
- Lentes e visão: exercícios sobre lentes convergentes e divergentesDocumento6 páginasLentes e visão: exercícios sobre lentes convergentes e divergentesleugimfisicaAinda não há avaliações
- Relatório parcial de Psicologia ExperimentalDocumento16 páginasRelatório parcial de Psicologia ExperimentalGEOVANA RISSATO GARCIAAinda não há avaliações
- Flash Card - PediatriaDocumento9 páginasFlash Card - PediatriaADRIANA VIEIRA ALVARENGAAinda não há avaliações
- Classificação Climática B.m.aDocumento1 páginaClassificação Climática B.m.aRoberta FreireAinda não há avaliações
- Alimentação na BíbliaDocumento21 páginasAlimentação na BíbliaRav Yehunatan Mikhail ZaytsAinda não há avaliações
- Transtorno de LinguagemDocumento8 páginasTranstorno de LinguagemmetalliraphaAinda não há avaliações
- Resumo de Psicofarmacologia da Faculdade Internacional da ParaíbaDocumento6 páginasResumo de Psicofarmacologia da Faculdade Internacional da ParaíbaAphrouddy (Koi Ni Furu)Ainda não há avaliações
- Exercicio de CircuitosDocumento2 páginasExercicio de CircuitosFrancisco SilvaAinda não há avaliações
- Caracterização funcional da vegetação da Barra da TijucaDocumento56 páginasCaracterização funcional da vegetação da Barra da TijucaJoão MouraAinda não há avaliações
- NBR 1002 - Mascaras de Protecao Respiratoria de Uso Nao ProfissionalDocumento42 páginasNBR 1002 - Mascaras de Protecao Respiratoria de Uso Nao ProfissionalKildere AlmeidaAinda não há avaliações
- Garrafa Térmica Arabic Classhome 1 Litro - BrancoDocumento3 páginasGarrafa Térmica Arabic Classhome 1 Litro - Brancodaysa joanita dos santos souzaAinda não há avaliações