Você também pode gostar
- Eletromagnetismo - Joseph EdministerDocumento238 páginasEletromagnetismo - Joseph EdministerAdriel Siqueira MendesAinda não há avaliações
- Relatorio 4 2020-2Documento6 páginasRelatorio 4 2020-2Edilton Costa AlvesAinda não há avaliações
- Prova PDFDocumento12 páginasProva PDFMaria MarizAinda não há avaliações
- Estatística - Regressão Linear Simples e MúltiplaDocumento4 páginasEstatística - Regressão Linear Simples e MúltiplaUilian SouzaAinda não há avaliações
- Teoria Dos Grafos para ComputacaoDocumento149 páginasTeoria Dos Grafos para ComputacaoAndrews RicardoAinda não há avaliações
- Laboratorio 05 Quimica UnifeiDocumento12 páginasLaboratorio 05 Quimica UnifeiHenrique RibeiroAinda não há avaliações
- Capitulo 3b - Diagrama Nyquist PDFDocumento32 páginasCapitulo 3b - Diagrama Nyquist PDFJoão Paulo PereiraAinda não há avaliações
- Diagrama NyquistDocumento93 páginasDiagrama NyquistLCOL_LuisLopesAinda não há avaliações
- Aula15 CSLDocumento30 páginasAula15 CSLVictor Hugo Garcia de CamposAinda não há avaliações
- Perguntas Teóricas Teste 2Documento9 páginasPerguntas Teóricas Teste 2João CavadasAinda não há avaliações
- Controle e Servomecanismos 1 - Trabalho AV2 PDFDocumento14 páginasControle e Servomecanismos 1 - Trabalho AV2 PDFFelipe PaisAinda não há avaliações
- Principios Cap 04Documento20 páginasPrincipios Cap 04Addy MucunaAinda não há avaliações
- Apresentacao Nyquist 04Documento31 páginasApresentacao Nyquist 04Victor EmanuelAinda não há avaliações
- Perguntas Teóricas Teste 2Documento9 páginasPerguntas Teóricas Teste 2João CavadasAinda não há avaliações
- Polos - Zeros e Estabilidade - 2011 - 2 PDFDocumento29 páginasPolos - Zeros e Estabilidade - 2011 - 2 PDFBruno AlvimAinda não há avaliações
- Apostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)Documento21 páginasApostila Controle - 17 - Análise de Estabilidade (Critério de Nyquist)lnery_1Ainda não há avaliações
- Ação de Controladores PIDDocumento8 páginasAção de Controladores PIDNelson JuniorAinda não há avaliações
- SR - T4 Dfiorillo Rev1Documento12 páginasSR - T4 Dfiorillo Rev1David de Almeida FiorilloAinda não há avaliações
- 03 Derivada AplicaçõesDocumento45 páginas03 Derivada AplicaçõesGenivaldo SilvaAinda não há avaliações
- Aula16 CSLDocumento33 páginasAula16 CSLVictor Hugo Garcia de CamposAinda não há avaliações
- CTRL Digital c3Documento19 páginasCTRL Digital c3Joseilton SouzaAinda não há avaliações
- Polos - Zeros e Estabilidade - 2011 - 2 PDFDocumento29 páginasPolos - Zeros e Estabilidade - 2011 - 2 PDFamadeusvcAinda não há avaliações
- Polos - Zeros e Estabilidade - 2011 - 2Documento29 páginasPolos - Zeros e Estabilidade - 2011 - 2LameseMecatronicaAinda não há avaliações
- 3 - Derivadas - AplicaçõesDocumento59 páginas3 - Derivadas - AplicaçõesAndré FreireAinda não há avaliações
- Exercícios para Realizar No Dia 19-06 - em AulaDocumento4 páginasExercícios para Realizar No Dia 19-06 - em Aulajão silvestre da cunhaAinda não há avaliações
- Controle e Servomecanismos I Aula 11 01 2023Documento10 páginasControle e Servomecanismos I Aula 11 01 2023Thiago de LimaAinda não há avaliações
- Aula 21 - Algoritmos Geométricos Elementares - Com AudioDocumento35 páginasAula 21 - Algoritmos Geométricos Elementares - Com Audioleandro santanaAinda não há avaliações
- Aula 16 25 11 2019 Sistemas de ControleDocumento59 páginasAula 16 25 11 2019 Sistemas de ControleNoedson RomarioAinda não há avaliações
- Sistema de ControleDocumento13 páginasSistema de ControleNetoSousaAinda não há avaliações
- Controle1 - Técnicas de Resposta em FrequênciaDocumento32 páginasControle1 - Técnicas de Resposta em FrequênciatressoengenhariaAinda não há avaliações
- Func TrigonometricasDocumento32 páginasFunc TrigonometricasMadalena SeabraAinda não há avaliações
- Transformacoes GeometricasDocumento34 páginasTransformacoes GeometricasMarco Antonio Rodrigues SilvaAinda não há avaliações
- VOD-Equações Da Reta, Paralelismo e Perpendicularismo e Distância de Ponto À Reta-2019Documento14 páginasVOD-Equações Da Reta, Paralelismo e Perpendicularismo e Distância de Ponto À Reta-2019welson R.Ainda não há avaliações
- CAPITULO9 - Correlação e RegressãoDocumento11 páginasCAPITULO9 - Correlação e RegressãoLeandro Ansbach SamwaysAinda não há avaliações
- Estabilidade RobustaDocumento35 páginasEstabilidade RobustaAdauto HanaokaAinda não há avaliações
- Regressão Linear SimplesDocumento22 páginasRegressão Linear SimplesDavid VenacioAinda não há avaliações
- Pratica A1 - Controle SS - Introdução As LMIs - Matlab - PythonDocumento22 páginasPratica A1 - Controle SS - Introdução As LMIs - Matlab - PythonVinícius BessaAinda não há avaliações
- 3 - Estabilidade Sistemas DiscretosDocumento10 páginas3 - Estabilidade Sistemas DiscretosglasceAinda não há avaliações
- Calculo de Incertezas PDFDocumento14 páginasCalculo de Incertezas PDFCorinne MartinAinda não há avaliações
- Aula2 APNP - Análise de Estabilidade de Routh-HurvitzDocumento41 páginasAula2 APNP - Análise de Estabilidade de Routh-Hurvitzmanolomay838Ainda não há avaliações
- Correla C Ao e Regress Ao Linear Simples 1 / 64Documento64 páginasCorrela C Ao e Regress Ao Linear Simples 1 / 64Taís HelenaAinda não há avaliações
- Derivadas - AplicaçõesDocumento108 páginasDerivadas - AplicaçõesWatson Matsumoto100% (1)
- Regressao Turma ITADocumento36 páginasRegressao Turma ITAisaac passosAinda não há avaliações
- Sintese de Voz Com QualidadeDocumento22 páginasSintese de Voz Com QualidadeManoel Marcio Silveira da LuzAinda não há avaliações
- Criterio de Estabilidade de Routh-Hurwitz - RefDocumento13 páginasCriterio de Estabilidade de Routh-Hurwitz - RefGabriel AlbuquerqueAinda não há avaliações
- Mat 11 ExamesDocumento111 páginasMat 11 ExamesRita SilvaAinda não há avaliações
- 12 - Aula 10 - Equação Da Reta e InclinaçãoDocumento21 páginas12 - Aula 10 - Equação Da Reta e InclinaçãoJosé Luiz AndréAinda não há avaliações
- Práticas - Controle de Processos 04Documento2 páginasPráticas - Controle de Processos 04Alessandro JesusAinda não há avaliações
- Aula3 - Análise Pelo Método Do Lugar Das RaízesDocumento17 páginasAula3 - Análise Pelo Método Do Lugar Das Raízesmanolomay838Ainda não há avaliações
- Controle Avançado Aula 21Documento18 páginasControle Avançado Aula 21JeffersonAinda não há avaliações
- 05 Estabilidade RouthDocumento10 páginas05 Estabilidade RouthNey Jr.Ainda não há avaliações
- Verão Matemática 2017Documento9 páginasVerão Matemática 2017Wat handsAinda não há avaliações
- Aula 4Documento7 páginasAula 4Joaquim Simão ArmandoAinda não há avaliações
- Assíntotas Ao Gráfico de Uma Função - V2Documento20 páginasAssíntotas Ao Gráfico de Uma Função - V2Nicola100% (1)
- Margem de Ganho e Fase PDFDocumento40 páginasMargem de Ganho e Fase PDFleandrociscotoAinda não há avaliações
- Retas Tangentes, Taxas de Variação e DerivadaDocumento12 páginasRetas Tangentes, Taxas de Variação e DerivadaJade VargasAinda não há avaliações
- Controlo de Sistemas: Problemas 2 SemanaDocumento10 páginasControlo de Sistemas: Problemas 2 SemanaKalopsia SwevenAinda não há avaliações
- Monitoria 4Documento1 páginaMonitoria 4Clauberto JúniorAinda não há avaliações
- 4 - Segurança Da InformaçãoDocumento132 páginas4 - Segurança Da InformaçãoClauberto JúniorAinda não há avaliações
- Lista Cap 4 - Aspectos B Sicos Da Transmiss o de EnergiaDocumento17 páginasLista Cap 4 - Aspectos B Sicos Da Transmiss o de EnergiaClauberto JúniorAinda não há avaliações
- Minayo 9788575413661 12Documento25 páginasMinayo 9788575413661 12Clauberto JúniorAinda não há avaliações
- Respironics - Millenium - Mod 605Documento14 páginasRespironics - Millenium - Mod 605Clauberto JúniorAinda não há avaliações
- 20 - Meio Ambiente e Desenvolvimento SustentávelDocumento7 páginas20 - Meio Ambiente e Desenvolvimento SustentávelClauberto JúniorAinda não há avaliações
- Apostila - Equipamentos Elétricos - Antônio VarejãoDocumento512 páginasApostila - Equipamentos Elétricos - Antônio VarejãoClauberto JúniorAinda não há avaliações
- Minayo 9788575413661 13Documento29 páginasMinayo 9788575413661 13Clauberto JúniorAinda não há avaliações
- FICHAMENTO - Meio AmbienteDocumento3 páginasFICHAMENTO - Meio AmbienteClauberto JúniorAinda não há avaliações
- Aula UtiDocumento13 páginasAula UtiClauberto JúniorAinda não há avaliações
- Lição 11 Lucas-Atos o Modelo Pentecostal para HojeDocumento6 páginasLição 11 Lucas-Atos o Modelo Pentecostal para HojeClauberto JúniorAinda não há avaliações
- A Teoria Da Evolução Sob Escrutínio Parte 6 - O Verdadeiro Motivo de Darwin Ter Ido Estudar Artes (Teologia)Documento3 páginasA Teoria Da Evolução Sob Escrutínio Parte 6 - O Verdadeiro Motivo de Darwin Ter Ido Estudar Artes (Teologia)Clauberto JúniorAinda não há avaliações
- Aula Ifpb Bombas Infusã oDocumento10 páginasAula Ifpb Bombas Infusã oClauberto JúniorAinda não há avaliações
- Aula Centro Cirurgico e EsterelizaçãoDocumento14 páginasAula Centro Cirurgico e EsterelizaçãoClauberto JúniorAinda não há avaliações
- A Teoria Da Evolução Sob Escrutínio Parte 5 - A Influência Que Marcou Charles Darwin Até A Formulação Da Teoria Da EvoluçãoDocumento7 páginasA Teoria Da Evolução Sob Escrutínio Parte 5 - A Influência Que Marcou Charles Darwin Até A Formulação Da Teoria Da EvoluçãoClauberto JúniorAinda não há avaliações
- Defenda Sua FéDocumento21 páginasDefenda Sua FéClauberto JúniorAinda não há avaliações
- Aula 2 Cal e Aferi 2012.2Documento23 páginasAula 2 Cal e Aferi 2012.2Clauberto JúniorAinda não há avaliações
- Apr TN STP 241 399 34053Documento18 páginasApr TN STP 241 399 34053Clauberto JúniorAinda não há avaliações
- Lição 13 A VIGILÂNCIA CONSERVA PURA A IGREJADocumento3 páginasLição 13 A VIGILÂNCIA CONSERVA PURA A IGREJAClauberto JúniorAinda não há avaliações
- A Supremacia Das EscriturasDocumento5 páginasA Supremacia Das EscriturasClauberto JúniorAinda não há avaliações
- Abra A Jaula - Lição N° 03 - 4° TM 2020.Documento2 páginasAbra A Jaula - Lição N° 03 - 4° TM 2020.Clauberto JúniorAinda não há avaliações
- Aula 3 - Riscos Elétricos - r2.2Documento198 páginasAula 3 - Riscos Elétricos - r2.2Clauberto JúniorAinda não há avaliações
- Expressões Algébricas - Toda MatériaDocumento6 páginasExpressões Algébricas - Toda MatériaRafael Jungo JambaAinda não há avaliações
- Exercícios Sobre Paralelepípedos e CubosDocumento3 páginasExercícios Sobre Paralelepípedos e CubosChristianGamaAinda não há avaliações
- Cinetica Quimica Enunciados 20190625-080524Documento52 páginasCinetica Quimica Enunciados 20190625-080524Júlia DemunerAinda não há avaliações
- CineticaDocumento3 páginasCineticapedroaugusto1313Ainda não há avaliações
- Manual TEN22Documento30 páginasManual TEN22ThunderboltAinda não há avaliações
- Formatos Que Saem Da Linha (Recartilhar) PDFDocumento11 páginasFormatos Que Saem Da Linha (Recartilhar) PDFcaioAinda não há avaliações
- Exercícios Sobre IsomeriaDocumento22 páginasExercícios Sobre IsomeriaGleisonAinda não há avaliações
- AIRMASTERDocumento1 páginaAIRMASTERCarine FreitasAinda não há avaliações
- Elementos de Máquinas - Telecurso 2000 PDFDocumento425 páginasElementos de Máquinas - Telecurso 2000 PDFLeandro Ricardo100% (3)
- A Relação Direções Cardeais-Esquema Corporal No Ensino de Geografia: Uma Perspectiva Histórica e AfirmativaDocumento16 páginasA Relação Direções Cardeais-Esquema Corporal No Ensino de Geografia: Uma Perspectiva Histórica e AfirmativaSérgio Luiz MirandaAinda não há avaliações
- E6ano PDFDocumento28 páginasE6ano PDFgripe AAinda não há avaliações
- NT.001.EQTL - Normas e Padrões - Fornecimento de Energia Elétrica em Baixa TensãoDocumento94 páginasNT.001.EQTL - Normas e Padrões - Fornecimento de Energia Elétrica em Baixa Tensãoengnnews2010Ainda não há avaliações
- Motor EléctricoDocumento3 páginasMotor EléctricoDaniel GarcêsAinda não há avaliações
- Fit EscolaDocumento5 páginasFit EscolaheldermsAinda não há avaliações
- Apostila 7 - Tipologia Dos veículos-DNIT PDFDocumento112 páginasApostila 7 - Tipologia Dos veículos-DNIT PDFLuis Augusto Neto100% (1)
- Unid.1.2.3 - Fibra Óptica T3-2023Documento77 páginasUnid.1.2.3 - Fibra Óptica T3-2023Rafael NevesAinda não há avaliações
- A Importancia Da Competição Na Formação Do Jovem AtletaDocumento24 páginasA Importancia Da Competição Na Formação Do Jovem AtletaCarlos MC Cruz100% (1)
- Propriedades Físicas Dos MineraisDocumento16 páginasPropriedades Físicas Dos MineraisEmilio DjiprincyAinda não há avaliações
- Fundamentos de Automação-Rev-03 PDFDocumento82 páginasFundamentos de Automação-Rev-03 PDFLuiz Otávio Pacheco100% (1)
- 3EM-Consumo de Energia EletricaDocumento2 páginas3EM-Consumo de Energia EletricaPedro MateusAinda não há avaliações
- Lista 1 - Lei de HookeDocumento3 páginasLista 1 - Lei de HookeLucasRenostoAinda não há avaliações
- FOTOGRAMETRIA BrandalizeDocumento49 páginasFOTOGRAMETRIA Brandalizevass8464Ainda não há avaliações
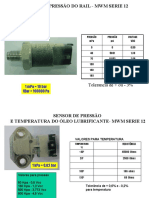
- Valores Dos Sensores2Documento7 páginasValores Dos Sensores2luiz ramosAinda não há avaliações
- Mat Expoen11 Solucoes Do Livros de FichasDocumento13 páginasMat Expoen11 Solucoes Do Livros de FichasPedro CarrolaAinda não há avaliações
- GATTI, Vanessa Vilas Bôas Súditos Da Rebelião: Estrutura de Sentimento Da Nova MPB (2009-2015) .Documento290 páginasGATTI, Vanessa Vilas Bôas Súditos Da Rebelião: Estrutura de Sentimento Da Nova MPB (2009-2015) .Rafael SilveiraAinda não há avaliações
- Estatica ApoiosDocumento6 páginasEstatica ApoiosEduardo CarvalhoAinda não há avaliações
- WEG Guia de Configuracao MMW03 M22CH PTDocumento74 páginasWEG Guia de Configuracao MMW03 M22CH PTAlex OliveiraAinda não há avaliações