Você também pode gostar
- Routh-HurwitzDocumento15 páginasRouth-HurwitzHudson MartinsAinda não há avaliações
- 10.criterio Ruth Hurwitz Resolucao PDFDocumento20 páginas10.criterio Ruth Hurwitz Resolucao PDFBrandaoAinda não há avaliações
- Pólos, Zeros e EstabilidadeDocumento14 páginasPólos, Zeros e EstabilidadeLeo WilliamAinda não há avaliações
- AT4 - Resposta Dinâmica Dos Sistemas Lineares (Cont)Documento15 páginasAT4 - Resposta Dinâmica Dos Sistemas Lineares (Cont)MonizAinda não há avaliações
- Pólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosDocumento29 páginasPólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosamadeusvcAinda não há avaliações
- Pólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosDocumento29 páginasPólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosLameseMecatronicaAinda não há avaliações
- Polos - Zeros e Estabilidade - 2011 - 2 PDFDocumento29 páginasPolos - Zeros e Estabilidade - 2011 - 2 PDFBruno AlvimAinda não há avaliações
- Apostila 3 Prova PDFDocumento63 páginasApostila 3 Prova PDFNelson JuniorAinda não há avaliações
- Criterio de Estabilidade de Routh-Hurwitz - RefDocumento13 páginasCriterio de Estabilidade de Routh-Hurwitz - RefGabriel AlbuquerqueAinda não há avaliações
- Controle de Processos Químicos: Estabilidade de Sistemas de Controle Routh-HurwitzDocumento28 páginasControle de Processos Químicos: Estabilidade de Sistemas de Controle Routh-HurwitzGnu_saraAinda não há avaliações
- Trabalho2 (Final)Documento33 páginasTrabalho2 (Final)Haroldo FilhoAinda não há avaliações
- Controle e Observação em Sistemas DinâmicosDocumento4 páginasControle e Observação em Sistemas DinâmicosAntonio BatistaAinda não há avaliações
- Controle Automático: Aula 2 - 1Documento64 páginasControle Automático: Aula 2 - 1Leo WilliamAinda não há avaliações
- Métodos Numéricos 1Documento122 páginasMétodos Numéricos 1Eduardo HenriqueAinda não há avaliações
- Aula 2Documento22 páginasAula 2Almeida AdilsonAinda não há avaliações
- Controle1_Técnicas de resposta em frequênciaDocumento32 páginasControle1_Técnicas de resposta em frequênciatressoengenhariaAinda não há avaliações
- Laboratório 1 - Análise e Controle de Sistemas MecânicosDocumento18 páginasLaboratório 1 - Análise e Controle de Sistemas Mecânicosjmaj jmajAinda não há avaliações
- Ogata - Criterio de RouthDocumento6 páginasOgata - Criterio de RouthFelipe Morais De FariaAinda não há avaliações
- Laplace No MatlabDocumento10 páginasLaplace No MatlabNazareno BragaAinda não há avaliações
- Solucoes Regional 2013 PDFDocumento24 páginasSolucoes Regional 2013 PDFa3kiraAinda não há avaliações
- Trabalho 2 - Ganho CríticoDocumento4 páginasTrabalho 2 - Ganho CríticoMeury BiazattiAinda não há avaliações
- Relatorio Trabalho1 Mec AplDocumento17 páginasRelatorio Trabalho1 Mec Aplfrickckyou420Ainda não há avaliações
- Controle - Exercicios C Gabarito-1Documento6 páginasControle - Exercicios C Gabarito-1Pulqueres Araújo de LemosAinda não há avaliações
- Modelagem Matemática de Sistemas Rotacionais MecânicosDocumento5 páginasModelagem Matemática de Sistemas Rotacionais MecânicosRodrigo LimaAinda não há avaliações
- Controle integral elimina erro estacionárioDocumento8 páginasControle integral elimina erro estacionárioNelson JuniorAinda não há avaliações
- Modelagem e controle de uma bomba dosadoraDocumento16 páginasModelagem e controle de uma bomba dosadoraELISA DE SOUZA SILVAAinda não há avaliações
- Lista de ExerciciosDocumento6 páginasLista de ExerciciosAline AraujoAinda não há avaliações
- p1 Controle AulasDocumento135 páginasp1 Controle AulasjoaoreniAinda não há avaliações
- Aula 6-Estabilidade de RouthDocumento23 páginasAula 6-Estabilidade de RouthEsselino Luis RaimundoAinda não há avaliações
- AutocorrelaçãoDocumento5 páginasAutocorrelaçãoAnonymous b0cKPzDMqfAinda não há avaliações
- Práticas - Controle de Processos 04Documento2 páginasPráticas - Controle de Processos 04Alessandro JesusAinda não há avaliações
- 3.a Aula - Sist. Lineares - Linearização de SistemasDocumento51 páginas3.a Aula - Sist. Lineares - Linearização de SistemasFrancisco SantosAinda não há avaliações
- Aula 09 - PCC - Fundamentos de COntroleDocumento44 páginasAula 09 - PCC - Fundamentos de COntrolethaysAinda não há avaliações
- Espaços de Estados - Alocação de PólosDocumento13 páginasEspaços de Estados - Alocação de PólosAnderson Marques LealAinda não há avaliações
- Exercícios ResolvidosDocumento5 páginasExercícios ResolvidosmuberttiAinda não há avaliações
- Cap3 LaplaceDocumento32 páginasCap3 LaplaceGabriel MazzoniAinda não há avaliações
- Controle de Pêndulo InvertidoDocumento25 páginasControle de Pêndulo InvertidoSergio Murilo XavierAinda não há avaliações
- Modelos matemáticos de sistemas dinâmicosDocumento17 páginasModelos matemáticos de sistemas dinâmicosVarzeanoAinda não há avaliações
- Considerações Superficiais Sobre Computação QuânticaDocumento34 páginasConsiderações Superficiais Sobre Computação Quânticaoswaldomarangoni5295Ainda não há avaliações
- Analise Sis Lineares 1Documento55 páginasAnalise Sis Lineares 1vgustavo_1Ainda não há avaliações
- Solução Das Equações de EstadoDocumento41 páginasSolução Das Equações de EstadothesinglemAinda não há avaliações
- MAT4154 33A Grupo5 T3 23 2Documento18 páginasMAT4154 33A Grupo5 T3 23 2ClóvisAinda não há avaliações
- Aula 1 Sis Ctle 2022 2SDocumento60 páginasAula 1 Sis Ctle 2022 2SBejamin AndersonAinda não há avaliações
- Propriedades e regras para cálculo de determinantes de matrizesDocumento9 páginasPropriedades e regras para cálculo de determinantes de matrizesDaniel ReisAinda não há avaliações
- Modelagem no domínio do tempoDocumento67 páginasModelagem no domínio do tempoEmilly CarvalhoAinda não há avaliações
- Estabilidade: Critério de Routh-Hurwitz, 1o caso especialDocumento10 páginasEstabilidade: Critério de Routh-Hurwitz, 1o caso especialvinicius andre matosAinda não há avaliações
- Solução P1 2020Documento10 páginasSolução P1 2020Lucas MorthAinda não há avaliações
- Simplificação de diagramas de blocos e efeito de carregamentoDocumento8 páginasSimplificação de diagramas de blocos e efeito de carregamentoneto512Ainda não há avaliações
- Exercícios para Realizar No Dia 19-06 - em AulaDocumento4 páginasExercícios para Realizar No Dia 19-06 - em Aulajão silvestre da cunhaAinda não há avaliações
- Laboratorio1 MRU Roteiro-1Documento6 páginasLaboratorio1 MRU Roteiro-1dasd asdfAinda não há avaliações
- Cadeias de Markov e matrizes de transiçãoDocumento9 páginasCadeias de Markov e matrizes de transiçãoMarcelo AlmeidaAinda não há avaliações
- Sistemas de Controle AutomáticoDocumento17 páginasSistemas de Controle AutomáticoleagueOfHU3 BRAinda não há avaliações
- Trabalho - Pêndulo Invertido Com Roda InercialDocumento6 páginasTrabalho - Pêndulo Invertido Com Roda InercialJoão Marcelo RomanoAinda não há avaliações
- Alg LinDocumento48 páginasAlg LinUnreal MileniaumAinda não há avaliações
- Unidade III - Modelagem de Sistemas FísicosDocumento16 páginasUnidade III - Modelagem de Sistemas FísicosRafael SousaAinda não há avaliações
- Prática 1 - Simulação de SistemasDocumento5 páginasPrática 1 - Simulação de Sistemasjgsantana.egeAinda não há avaliações
- Finanças Pessoais e InvestimentosDocumento17 páginasFinanças Pessoais e InvestimentosMiguelSalgadoAinda não há avaliações
- Apostila ENGEMAN - Modulo BásicoDocumento82 páginasApostila ENGEMAN - Modulo BásicoRoberto PriscilaAinda não há avaliações
- Análise de tensões em vasos de pressão cilíndricos e esféricosDocumento42 páginasAnálise de tensões em vasos de pressão cilíndricos e esféricosJosé Roberto HonórioAinda não há avaliações
- Instruções para realização de prova objetiva e discursivaDocumento19 páginasInstruções para realização de prova objetiva e discursivaJoao victor SameiroAinda não há avaliações
- Acupuntura Estetica Modulo 1Documento38 páginasAcupuntura Estetica Modulo 1Claudio Solano100% (1)
- As imunidades tributárias do artigo 150, VI da Constituição FederalDocumento3 páginasAs imunidades tributárias do artigo 150, VI da Constituição FederalAdriana MorettonAinda não há avaliações
- Relações Econômicas InternacionaisDocumento3 páginasRelações Econômicas InternacionaisBrunaAinda não há avaliações
- Charge, Texto de Divulgação Científica e Reportagem - 3º Ao 5º AnoDocumento4 páginasCharge, Texto de Divulgação Científica e Reportagem - 3º Ao 5º Anoadrielebarbosa12Ainda não há avaliações
- As Seis Lições - LivroDocumento21 páginasAs Seis Lições - LivroRonaldo AssisAinda não há avaliações
- Orçamento Reparos Drive Yaskawa - OS 40.162Documento2 páginasOrçamento Reparos Drive Yaskawa - OS 40.162Marcelo JesusAinda não há avaliações
- Matrizes Determinantes IIDocumento2 páginasMatrizes Determinantes IIRonaldo NdalaAinda não há avaliações
- Nota de Aula 10ADocumento35 páginasNota de Aula 10AMarcelo RomarcoAinda não há avaliações
- Introducao Aos BiomasDocumento9 páginasIntroducao Aos Biomasdaniel.morayan010Ainda não há avaliações
- Análise de Desempenho de Enlaces de Satélites de Alta CapacidadeDocumento26 páginasAnálise de Desempenho de Enlaces de Satélites de Alta CapacidadeAline MendonçaAinda não há avaliações
- Ebook PrincipalDocumento28 páginasEbook Principalcamily candyAinda não há avaliações
- Nattokinase: fibrinólise e saúde cardiovascularDocumento4 páginasNattokinase: fibrinólise e saúde cardiovascularSandro Rogério AlvaresAinda não há avaliações
- Capo 1Documento1 páginaCapo 1Raphael VicenteAinda não há avaliações
- O que é um e-mailDocumento3 páginasO que é um e-mailEfraim MoraesAinda não há avaliações
- MR Gyn MR Gyn Minha Juventude - Piano e Teclado - 1398866536Documento5 páginasMR Gyn MR Gyn Minha Juventude - Piano e Teclado - 1398866536Felipe CamargoAinda não há avaliações
- APOSTILA LínguaPortuguesaDocumento110 páginasAPOSTILA LínguaPortuguesaAlessandro TorrezaniAinda não há avaliações
- Como Obama consegue ser produtivoDocumento4 páginasComo Obama consegue ser produtivoMoby Sport OficialAinda não há avaliações
- Gestão Património EstadoDocumento50 páginasGestão Património Estadocassimo luis mundimoAinda não há avaliações
- Dívida pública em Moçambique: análise da sustentabilidade e implicações do acordo do Conselho ConstitucionalDocumento39 páginasDívida pública em Moçambique: análise da sustentabilidade e implicações do acordo do Conselho ConstitucionalErnesto Alvaro Mussa100% (1)
- Engenharia de Saneamento Básico e Ambiental - 400h - Inbec MGDocumento8 páginasEngenharia de Saneamento Básico e Ambiental - 400h - Inbec MGCarlos OliveiraAinda não há avaliações
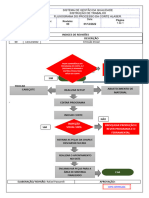
- 10 FLUXO CORTE LASER - Revisado 21-07-2020Documento1 página10 FLUXO CORTE LASER - Revisado 21-07-2020Rafael PassarelliAinda não há avaliações
- 823.828.165-20 DAE Único - Licenciamento Integrado 823.828.165-20 Nadson Gouvea Santana JPY1645 27400 SalvadorDocumento1 página823.828.165-20 DAE Único - Licenciamento Integrado 823.828.165-20 Nadson Gouvea Santana JPY1645 27400 SalvadorNadson SantanaAinda não há avaliações
- Formação Identidade e Relação Pais-FilhosDocumento16 páginasFormação Identidade e Relação Pais-FilhosFelix Nungo FmnAinda não há avaliações
- Os 222 Anos Da Família Fontenele Na Localidade Jacareí de BaixoDocumento3 páginasOs 222 Anos Da Família Fontenele Na Localidade Jacareí de BaixoSílvio FonteneleAinda não há avaliações
- Curso de técnicas de operações em terminais de contêineresDocumento11 páginasCurso de técnicas de operações em terminais de contêineresAngelo BotelhoAinda não há avaliações
- Manejo integrado das pragas da mandiocaDocumento17 páginasManejo integrado das pragas da mandiocaIraci RosaAinda não há avaliações