Você também pode gostar
- 3.1-Geometria - Linha - 1 - Prof. ErnaniDocumento26 páginas3.1-Geometria - Linha - 1 - Prof. ErnaniThiago Alexandre de AlmeidaAinda não há avaliações
- Instrução Manutenção Potenciometro e PenduloDocumento44 páginasInstrução Manutenção Potenciometro e PenduloMilson Vieira100% (1)
- 13 SSP 203Documento4 páginas13 SSP 203Anonymous Byopfd100% (1)
- Descrição Técnica AlcDocumento21 páginasDescrição Técnica AlcWillian Ramon de Miranda Cavalcante100% (2)
- Sistema hidráulico de marcha em motor dieselDocumento1 páginaSistema hidráulico de marcha em motor dieselBruno silva pereiraAinda não há avaliações
- Aferição Da Banca de Socaria 08-16Documento10 páginasAferição Da Banca de Socaria 08-16Willian Ramon de Miranda Cavalcante100% (1)
- Reguladora de lastro de alta velocidadeDocumento4 páginasReguladora de lastro de alta velocidadepercy f.f100% (1)
- 09 32CSMDocumento36 páginas09 32CSMSidartaTrovao BarbalhoAinda não há avaliações
- Manual de manutenção truque Cruzaço 6 x 11Documento41 páginasManual de manutenção truque Cruzaço 6 x 11Fabiano Oliveira100% (1)
- Adaptação de locomotivas SD 40 para bitola métricaDocumento13 páginasAdaptação de locomotivas SD 40 para bitola métricaRicardo JuniorAinda não há avaliações
- SL2030 Janeiro 08Documento8 páginasSL2030 Janeiro 08Willian Ramon de Miranda CavalcanteAinda não há avaliações
- NBR 5565 - RODEIRO FERROVIÁRIO (Revisão) - Reuniao de Setembro 2006Documento24 páginasNBR 5565 - RODEIRO FERROVIÁRIO (Revisão) - Reuniao de Setembro 2006Daniel Lodi100% (1)
- 4.3-Superestr - Lastro - 1 - Prof. ErnaniDocumento13 páginas4.3-Superestr - Lastro - 1 - Prof. ErnaniThiago Alexandre de AlmeidaAinda não há avaliações
- Correção geométrica da viaDocumento88 páginasCorreção geométrica da viaThiago Neres100% (2)
- 09.1 - FERROVIAS - Via - Permanente - Parte4 - Construção Ferroviária - REV5Documento109 páginas09.1 - FERROVIAS - Via - Permanente - Parte4 - Construção Ferroviária - REV5Marcelo Morais100% (1)
- Defeitos e serviços de manutenção de vias ferroviáriasDocumento103 páginasDefeitos e serviços de manutenção de vias ferroviáriasLucas Rangel RodriguesAinda não há avaliações
- Apostila 1 Via Permanente 2012Documento85 páginasApostila 1 Via Permanente 2012tultler100% (1)
- Catalogo HyvaDocumento28 páginasCatalogo HyvaNova prudencromoAinda não há avaliações
- Apostila Controle Da Contaminação em Sistemas Hidráulicos - M3001-2 BRDocumento134 páginasApostila Controle Da Contaminação em Sistemas Hidráulicos - M3001-2 BRThiago Romero100% (1)
- Proposta para inspeção de equipamento industrialDocumento14 páginasProposta para inspeção de equipamento industrialPedroDiazAinda não há avaliações
- Compressor de ar JuntasDocumento11 páginasCompressor de ar JuntasRicardo Marcia DonadonAinda não há avaliações
- Fatores que influenciam emergências indesejadas em trens da MRSDocumento78 páginasFatores que influenciam emergências indesejadas em trens da MRSNelson Alves Ferreira JuniorAinda não há avaliações
- Tecnologia da socaria - O processo correto para manutenção de linhas e AMVsDocumento36 páginasTecnologia da socaria - O processo correto para manutenção de linhas e AMVselcioniwa100% (1)
- Simbologia Dos Componentes - M2001 2 P 19Documento29 páginasSimbologia Dos Componentes - M2001 2 P 19alsbauerAinda não há avaliações
- 09-32.16 Circuitos Proporcionais de Banca de Socaria - NewDocumento30 páginas09-32.16 Circuitos Proporcionais de Banca de Socaria - NewWillian Ramon de Miranda CavalcanteAinda não há avaliações
- Catálogo de produtos para construção ferroviáriaDocumento60 páginasCatálogo de produtos para construção ferroviáriaLuciano JuniorAinda não há avaliações
- Manual de Produtos de Cilindros Pneumaticos - 20170619 - 114457 - Pneum PDFDocumento112 páginasManual de Produtos de Cilindros Pneumaticos - 20170619 - 114457 - Pneum PDFJose luiz coelhoAinda não há avaliações
- Redutor de Rosca Sem Fim e Coroa 2Documento36 páginasRedutor de Rosca Sem Fim e Coroa 2Marcos RodriguesAinda não há avaliações
- Processos de fabricação e conexões de tubulaçõesDocumento45 páginasProcessos de fabricação e conexões de tubulaçõesCézar NobreAinda não há avaliações
- Aula 10 Válvulas HidráulicasDocumento31 páginasAula 10 Válvulas HidráulicasWeberson CorreaAinda não há avaliações
- DL001 - Sistema Não Inicia - Sidarta TrovãoDocumento15 páginasDL001 - Sistema Não Inicia - Sidarta TrovãoSidartaTrovao BarbalhoAinda não há avaliações
- Acoplamento dimensionamentoDocumento2 páginasAcoplamento dimensionamentoCarlos Volnei FerreiraAinda não há avaliações
- Apostila de Freio Locomotiva - PDF - Freio - LocomotivasDocumento153 páginasApostila de Freio Locomotiva - PDF - Freio - LocomotivasSara MeloAinda não há avaliações
- BA5591 App A MeasFrameAdj V02-BrasDocumento26 páginasBA5591 App A MeasFrameAdj V02-BrasAndré SousaAinda não há avaliações
- Parafusos - Aula 1Documento43 páginasParafusos - Aula 1marceloAinda não há avaliações
- RP 1009101 PDFDocumento20 páginasRP 1009101 PDFDalila VaroghAinda não há avaliações
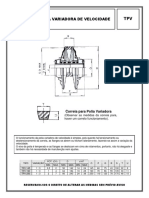
- Polia Variadora de Velocidade TPVDocumento1 páginaPolia Variadora de Velocidade TPVPhilaletoIrineusAinda não há avaliações
- RP 07001Documento25 páginasRP 07001Eduardo Augusto100% (1)
- Vertimax - Motorredutores e Redutores de Engrenagens HelicoidaisDocumento177 páginasVertimax - Motorredutores e Redutores de Engrenagens HelicoidaisDiego RincónAinda não há avaliações
- VedaçãoDocumento42 páginasVedaçãoAldembar Sarmento100% (2)
- Parker CatálogoDocumento56 páginasParker CatálogoWagner OliveiraAinda não há avaliações
- Transporte Ferroviário e AéreoDocumento29 páginasTransporte Ferroviário e Aéreo2f8st40BAinda não há avaliações
- Aço resistente ao desgaste Quard 500Documento2 páginasAço resistente ao desgaste Quard 500mazuckAinda não há avaliações
- Catálogo de Eixo Cardan-V4-859Documento16 páginasCatálogo de Eixo Cardan-V4-859mhp123100% (1)
- Manual MecânicoDocumento1.267 páginasManual MecânicoReinaldo SantiagoAinda não há avaliações
- Catálogo - Contra Recuo - TTHS-TTHVR - Rev1 PDFDocumento1 páginaCatálogo - Contra Recuo - TTHS-TTHVR - Rev1 PDFluiziriasAinda não há avaliações
- Freio a ar de locomotivas e vagõesDocumento63 páginasFreio a ar de locomotivas e vagõesPauloAinda não há avaliações
- Catálogo BGL BuchasDocumento15 páginasCatálogo BGL BuchasBraz Pataro NetoAinda não há avaliações
- Fadiga e FraturaDocumento91 páginasFadiga e Fraturagesiel melo100% (1)
- Eixos Cardan MeritorDocumento73 páginasEixos Cardan Meritormessas93100% (1)
- Torno mecânico PUCRSDocumento21 páginasTorno mecânico PUCRSByaukenAinda não há avaliações
- Ermeto - ConexõesDocumento266 páginasErmeto - ConexõesElieser Júnio100% (1)
- 09-16 CAT BA 5199 BrasDocumento214 páginas09-16 CAT BA 5199 BrasBruno silva pereira100% (1)
- Freios de veículos comerciais e ônibusDocumento57 páginasFreios de veículos comerciais e ônibusDiego BolivarAinda não há avaliações
- Ttmf-020-03 Noções de VPDocumento78 páginasTtmf-020-03 Noções de VPAnderson Junior100% (2)
- Bombas Pistões AxiaisDocumento7 páginasBombas Pistões AxiaisOrlando LimaAinda não há avaliações
- Prova Topografia PublicarDocumento18 páginasProva Topografia PublicarRodolpho SimoneAinda não há avaliações
- Faça valer a pena: Determine as cotas do PIV e PIV2 em perfil de terrenoDocumento6 páginasFaça valer a pena: Determine as cotas do PIV e PIV2 em perfil de terrenoOzeias ChagasAinda não há avaliações
- Capítulo 17 - Locação 2Documento12 páginasCapítulo 17 - Locação 2Erison BarrosAinda não há avaliações
- Capítulo 17 - Locação 2Documento12 páginasCapítulo 17 - Locação 2DanielLimaAinda não há avaliações
- Importância da drenagem para o sublastro ferroviárioDocumento2 páginasImportância da drenagem para o sublastro ferroviárioThiago Alexandre de AlmeidaAinda não há avaliações
- 4.3-Superestr - Lastro - 1 - Prof. ErnaniDocumento13 páginas4.3-Superestr - Lastro - 1 - Prof. ErnaniThiago Alexandre de AlmeidaAinda não há avaliações
- 4.1-Superestr - Sublastro - 1 - Prof. ErnaniDocumento5 páginas4.1-Superestr - Sublastro - 1 - Prof. ErnaniThiago Alexandre de AlmeidaAinda não há avaliações
- 411 Aula 10 Conservacao Da ViaDocumento18 páginas411 Aula 10 Conservacao Da ViaThiago Alexandre de AlmeidaAinda não há avaliações
- Características geométricas das ferrovias UFRGSDocumento8 páginasCaracterísticas geométricas das ferrovias UFRGSThiago Alexandre de AlmeidaAinda não há avaliações
- Via PermanenteDocumento58 páginasVia PermanenteThiago Alexandre de AlmeidaAinda não há avaliações
- Dormentes ferroviários: materiais e especificaçõesDocumento19 páginasDormentes ferroviários: materiais e especificaçõesThiago Alexandre de AlmeidaAinda não há avaliações
- UFRGS apresenta técnicas de curvas ferroviáriasDocumento27 páginasUFRGS apresenta técnicas de curvas ferroviáriasThiago Alexandre de AlmeidaAinda não há avaliações
- Normas ACEA e API para lubrificantes de motores e transmissõesDocumento5 páginasNormas ACEA e API para lubrificantes de motores e transmissõesSamuel MorenoAinda não há avaliações
- Como funciona o diferencial do carroDocumento20 páginasComo funciona o diferencial do carroFirmino Valdemar SevundoAinda não há avaliações
- Motores Elétricos: Principais Tipos e CaracterísticasDocumento28 páginasMotores Elétricos: Principais Tipos e CaracterísticasLeandro Alves RezendeAinda não há avaliações
- Guia Pratico para Calculo de Recursos e Reservas MineraisDocumento15 páginasGuia Pratico para Calculo de Recursos e Reservas MineraisLuiz Carlos Damasceno100% (2)
- Avaliação autonomia idosoDocumento17 páginasAvaliação autonomia idosoAdfda FdfdfAinda não há avaliações
- Controle VibraçõesDocumento10 páginasControle VibraçõesLucas BoneziAinda não há avaliações
- Francisco Waldner-Os Astros e o Teu DestinoDocumento147 páginasFrancisco Waldner-Os Astros e o Teu DestinoRosa_100% (4)
- Relatorio. CalibraçãoDocumento4 páginasRelatorio. CalibraçãoViviane Cristina Buge BrasilAinda não há avaliações
- EC77D CA1 - 03 Qualidade e Durabilidade Das Estruturas de Concreto (Slides de Apresentação)Documento23 páginasEC77D CA1 - 03 Qualidade e Durabilidade Das Estruturas de Concreto (Slides de Apresentação)bianca limaAinda não há avaliações
- Roteiro Phet FotoelétricoDocumento2 páginasRoteiro Phet FotoelétricoVictor Yuji SamAinda não há avaliações
- P.A. - P.G. (Aprofundamento de Estudo)Documento4 páginasP.A. - P.G. (Aprofundamento de Estudo)RenataAinda não há avaliações
- Atv61 Catalogo Jan07 BRDocumento182 páginasAtv61 Catalogo Jan07 BRFabiano LimaAinda não há avaliações
- GUIA COMPLETO DE INSTALAÇÃO DE AR CONDICIONADO SPLIT 3.0-Protegido PDFDocumento201 páginasGUIA COMPLETO DE INSTALAÇÃO DE AR CONDICIONADO SPLIT 3.0-Protegido PDFGEANDERAinda não há avaliações
- Aptidão Física - TestesDocumento38 páginasAptidão Física - TestesMárcia GardêniaAinda não há avaliações
- Radiologia FreitasDocumento795 páginasRadiologia FreitasJéssica Iamashita100% (1)
- SEQUENCIAMENTODocumento25 páginasSEQUENCIAMENTOBRITTO12Ainda não há avaliações
- Resenha de livro sobre circuitos elétricos e teoria eletromagnéticaDocumento2 páginasResenha de livro sobre circuitos elétricos e teoria eletromagnéticamarcellopiresalvesAinda não há avaliações
- NBR 8522 - Concreto ― Determinação dos mód. estát. de elast. e de deformação à compressãoDocumento26 páginasNBR 8522 - Concreto ― Determinação dos mód. estát. de elast. e de deformação à compressãoMusicas boasAinda não há avaliações
- Projeto GuindasteDocumento5 páginasProjeto GuindasteHumberto SouzaAinda não há avaliações
- AULA B.01 - Cinemática e MRUDocumento1 páginaAULA B.01 - Cinemática e MRUvitoriadecastrowAinda não há avaliações
- Chen LiangDocumento15 páginasChen LiangThiago DalocoAinda não há avaliações
- Freio a ar: fundamentos e influências na frenagemDocumento24 páginasFreio a ar: fundamentos e influências na frenagemDjalma SouzaAinda não há avaliações
- Fq8 Teste 5 FinalDocumento5 páginasFq8 Teste 5 Finalpaulacnrnunes100% (1)
- Manual Do Rádio ICOM IC-706MKIIG em Português Do BrasilDocumento117 páginasManual Do Rádio ICOM IC-706MKIIG em Português Do Brasilradioamador100% (3)
- PDF Eletrica Automotiva Os Fundamentos1pdf DDDocumento241 páginasPDF Eletrica Automotiva Os Fundamentos1pdf DDGraciliano Produções100% (4)
- Forever Living - Aloe Body Toning KitDocumento2 páginasForever Living - Aloe Body Toning KitGrazy TavaresAinda não há avaliações
- Prostar - PT BRDocumento2 páginasProstar - PT BRPesca EspetacularAinda não há avaliações
- Questionário - Prática 2 - Micrômetro 280818 DefDocumento8 páginasQuestionário - Prática 2 - Micrômetro 280818 DefIó GalvãoAinda não há avaliações
- Lista-De - Exercicios CalorimetriaDocumento3 páginasLista-De - Exercicios CalorimetriaProfessor WagnerAinda não há avaliações