Você também pode gostar
- 2020 RCODP Martins ControledeTorqueeretraodeinicivos PArte1Documento9 páginas2020 RCODP Martins ControledeTorqueeretraodeinicivos PArte1Abo MuriaéAinda não há avaliações
- Alças de Retração Retracao RetraçaoDocumento17 páginasAlças de Retração Retracao RetraçaoClaudia Dazzi TardinAinda não há avaliações
- Técnica Do Arco Segmentado de Burstone PDFDocumento25 páginasTécnica Do Arco Segmentado de Burstone PDFLuis Paipay SantosAinda não há avaliações
- Fechamento de Espaços (Furquim) PDFDocumento34 páginasFechamento de Espaços (Furquim) PDFmutans100% (3)
- BIOMECANICADocumento9 páginasBIOMECANICALisbethAinda não há avaliações
- Analise EstruturalDocumento28 páginasAnalise EstruturalRafaelAinda não há avaliações
- Manual de Materiais DentáriosDocumento284 páginasManual de Materiais DentáriosSAULO MACHADO PICCOLOAinda não há avaliações
- Biomecânica e OclusãoDocumento7 páginasBiomecânica e OclusãoWedson FerreiraAinda não há avaliações
- APOSTILA Ancoragem Esquelética Absoluta em OrtodontiaDocumento142 páginasAPOSTILA Ancoragem Esquelética Absoluta em OrtodontiaMariana SantosAinda não há avaliações
- Aula 1 - Teoria Das EstruturasDocumento9 páginasAula 1 - Teoria Das EstruturasHenrique MadureiraAinda não há avaliações
- Analise Estrutural IIIDocumento13 páginasAnalise Estrutural IIIKanú Mário NamandagaAinda não há avaliações
- Tipos de Roscas de ImplantesDocumento10 páginasTipos de Roscas de ImplantesWillams AlfaiaAinda não há avaliações
- Intrusao MolarDocumento13 páginasIntrusao MolarJaciara GuimarãesAinda não há avaliações
- Notas Aula Mecsol 2023ago29 VecciDocumento170 páginasNotas Aula Mecsol 2023ago29 VecciGabriel SantosAinda não há avaliações
- Biomecanica OrtodonticaDocumento6 páginasBiomecanica Ortodonticalarissa.debetioAinda não há avaliações
- A Movimentação Dentária e A OrtodontiaDocumento4 páginasA Movimentação Dentária e A OrtodontiaPollyana MalheirosAinda não há avaliações
- Consideração de Forças para A Movimentação Dentaria 191Documento7 páginasConsideração de Forças para A Movimentação Dentaria 191Leonardo LamimAinda não há avaliações
- Abordagem Segmentada para Intrusão Simultânea Ao Fechamento Do Espaço - Biomecânica Do Arco Base de Três PeçasDocumento8 páginasAbordagem Segmentada para Intrusão Simultânea Ao Fechamento Do Espaço - Biomecânica Do Arco Base de Três PeçasFábio Eduardo ColomboAinda não há avaliações
- Biologia e Movimento DentarioDocumento44 páginasBiologia e Movimento DentarioYuri SambeniAinda não há avaliações
- Mecânica Dos Sólidos - Atividade 3Documento3 páginasMecânica Dos Sólidos - Atividade 3Gabriel SidaniAinda não há avaliações
- Oclusão em Prótese Sobre Implante - RESUMODocumento21 páginasOclusão em Prótese Sobre Implante - RESUMOGuilherme Schmitt de Andrade100% (1)
- O Fechamento de Espaços e A Mecanica de DeslizamentoDocumento7 páginasO Fechamento de Espaços e A Mecanica de DeslizamentoAbo MuriaéAinda não há avaliações
- Ortopedia CompletoDocumento224 páginasOrtopedia Completofrsandes95Ainda não há avaliações
- 01 TESTR Sebenta CAP1 IntroducaoDocumento18 páginas01 TESTR Sebenta CAP1 IntroducaoJosé Costa AlmeidaAinda não há avaliações
- Atividade Pós-AulaDocumento3 páginasAtividade Pós-AulaVanessa Santos CostaAinda não há avaliações
- Estabilidade em PPRDocumento30 páginasEstabilidade em PPRFabricio Carvalho100% (1)
- Mesialização de Molares Com Microparafusos OrtodonticosDocumento9 páginasMesialização de Molares Com Microparafusos Ortodonticospauloferreira713283Ainda não há avaliações
- Estática - Aula 1Documento46 páginasEstática - Aula 1Bruno Silva LacerdaAinda não há avaliações
- 15 - Macrogeometria de Implantes Odontológicos em CachorrosDocumento5 páginas15 - Macrogeometria de Implantes Odontológicos em CachorrosDébora PereiraAinda não há avaliações
- Análise Do Conforto Humano Perante As Vibrações de Estádios de FutebolDocumento13 páginasAnálise Do Conforto Humano Perante As Vibrações de Estádios de FutebolMarcius SegundoAinda não há avaliações
- Artigo Prótese Total 3Documento7 páginasArtigo Prótese Total 3Darlyane100% (1)
- Forças Internas e Momento de InerciaDocumento27 páginasForças Internas e Momento de InerciaRafaelAinda não há avaliações
- Ligas Metalizas Utilizadas: Invençao Do Delineador, Por Fortunati (1918)Documento29 páginasLigas Metalizas Utilizadas: Invençao Do Delineador, Por Fortunati (1918)Fabio DiasAinda não há avaliações
- Oclusão em Prótese Sobre Implante - RESUMO INCOMPLETODocumento21 páginasOclusão em Prótese Sobre Implante - RESUMO INCOMPLETOGuilherme Schmitt de AndradeAinda não há avaliações
- Vto e Sistemas de AncoragemDocumento4 páginasVto e Sistemas de AncoragemAlex SilvaAinda não há avaliações
- Arcos e CabosDocumento22 páginasArcos e CabosAndressa BertoliAinda não há avaliações
- Retração Dos Dentes Caninos Com Alças Aspectos Biomecânicos Indispensáveis para o Sucesso Deste ProcedimentoDocumento9 páginasRetração Dos Dentes Caninos Com Alças Aspectos Biomecânicos Indispensáveis para o Sucesso Deste Procedimentojavi222222Ainda não há avaliações
- The Sticking Point in The Bench Press TH - En.ptDocumento28 páginasThe Sticking Point in The Bench Press TH - En.ptanjosAinda não há avaliações
- Prototipagem 3 DdeumaprtesedemoDocumento5 páginasPrototipagem 3 DdeumaprtesedemoKadu FeetAinda não há avaliações
- FITNESS IV - Doc - 02 - Sistemas de Alavancas e Participação Muscular Nos ExercíciosDocumento4 páginasFITNESS IV - Doc - 02 - Sistemas de Alavancas e Participação Muscular Nos ExercíciosVC MTAinda não há avaliações
- Tipos de Grampos Protese Parcial RemovivelDocumento14 páginasTipos de Grampos Protese Parcial RemovivelRaelison SousaAinda não há avaliações
- Relatório Prática 2 - InstrumentaçãoDocumento21 páginasRelatório Prática 2 - InstrumentaçãoCesar99augusto ResendeAinda não há avaliações
- Resmat UFRJDocumento47 páginasResmat UFRJpamelasouzavillarrrAinda não há avaliações
- Resistencia Dos MateriaisDocumento70 páginasResistencia Dos MateriaisAdilson LBAinda não há avaliações
- Ajuste OclusalDocumento13 páginasAjuste Oclusal210859Ainda não há avaliações
- Desenvolvimento de Um Simulador para CalDocumento13 páginasDesenvolvimento de Um Simulador para CalNivaldo Carlos GolloAinda não há avaliações
- Tratamento Cirúrgico e Conservador - EscolioseDocumento6 páginasTratamento Cirúrgico e Conservador - EscolioseTânia QueirósAinda não há avaliações
- Ângulos de ArtrodeseDocumento5 páginasÂngulos de ArtrodeseFabricio Ferreira PaganiAinda não há avaliações
- Folder ÓrteseDocumento2 páginasFolder ÓrteseBruna OrtizAinda não há avaliações
- AEI AnaliseEstatia 2S0607Documento32 páginasAEI AnaliseEstatia 2S0607Vitor ArsenioAinda não há avaliações
- Análise Das Estruturas IDocumento145 páginasAnálise Das Estruturas IItalo Malinowski AragãoAinda não há avaliações
- Redução de FraturasDocumento2 páginasRedução de FraturasedilaineAinda não há avaliações
- 8 - Biomecânica Do Movimento Dental - 230427 - 095807Documento61 páginas8 - Biomecânica Do Movimento Dental - 230427 - 095807Jeovanna NunesAinda não há avaliações
- IntroduçãoDocumento11 páginasIntroduçãoHigh Level FlyingAinda não há avaliações
- Estabilidade do equilíbrio das estruturasNo EverandEstabilidade do equilíbrio das estruturasAinda não há avaliações
- Técnicas cirúrgicas minimamente invasivas para artrodese interfalangeana proximal em equinos, uma comparação das propriedades biomecânicas entre dois procedimentosNo EverandTécnicas cirúrgicas minimamente invasivas para artrodese interfalangeana proximal em equinos, uma comparação das propriedades biomecânicas entre dois procedimentosAinda não há avaliações
- SAKIMA Resumo Sistema ErttyDocumento27 páginasSAKIMA Resumo Sistema ErttyEryson Thiago PradoAinda não há avaliações
- Licenciamento-De-Pocos SEDAMDocumento2 páginasLicenciamento-De-Pocos SEDAMEryson Thiago PradoAinda não há avaliações
- Poço Tubular - Instituto Das Águas Do ParanáDocumento1 páginaPoço Tubular - Instituto Das Águas Do ParanáEryson Thiago PradoAinda não há avaliações
- Inea - Instituto Estadual Do AmbienteDocumento1 páginaInea - Instituto Estadual Do AmbienteEryson Thiago PradoAinda não há avaliações
- RX Mão e PunhoDocumento10 páginasRX Mão e PunhoMaria Cristina GottardelloAinda não há avaliações
- AmbientalDocumento9 páginasAmbientalEryson Thiago PradoAinda não há avaliações
- Desmistificando Os Braquetes AutoligáveisDocumento8 páginasDesmistificando Os Braquetes AutoligáveisLeonardo LamimAinda não há avaliações
- ElásticosDocumento14 páginasElásticosBeatriz Chileno100% (1)
- SAKIMA 2013 Ancoragem Esquelética em Ortodontia Parte IIDocumento18 páginasSAKIMA 2013 Ancoragem Esquelética em Ortodontia Parte IIEryson Thiago PradoAinda não há avaliações
- Tese de Ricardo LealDocumento32 páginasTese de Ricardo LealMarcos Vinicios LopesAinda não há avaliações
- Res. 413-09 (Aquicultura)Documento1 páginaRes. 413-09 (Aquicultura)Eryson Thiago PradoAinda não há avaliações
- GONÇALVES 2006 Efeito Da Clorexidina 012 Na Redução de Bact Viáveis em Aerossois Gerados em Proced de ProfilaxiaDocumento5 páginasGONÇALVES 2006 Efeito Da Clorexidina 012 Na Redução de Bact Viáveis em Aerossois Gerados em Proced de ProfilaxiaEryson Thiago PradoAinda não há avaliações
- SAKIMA 2013 Ancoragem Esquelética em Ortodontia Parte IDocumento13 páginasSAKIMA 2013 Ancoragem Esquelética em Ortodontia Parte IEryson Thiago PradoAinda não há avaliações
- JANSON 2004 A Utilização Do Apar Bionator de Balters P A Correção Da MO de Classe II 2 Divisão Relato de CCDocumento11 páginasJANSON 2004 A Utilização Do Apar Bionator de Balters P A Correção Da MO de Classe II 2 Divisão Relato de CCEryson Thiago PradoAinda não há avaliações
- Orientações para Dentistas - COVID-19 PDFDocumento14 páginasOrientações para Dentistas - COVID-19 PDFEryson Thiago PradoAinda não há avaliações
- Análises de Modelos - Uma Revisão Da LiteraturaDocumento13 páginasAnálises de Modelos - Uma Revisão Da LiteraturaMirelle FernandaAinda não há avaliações
- Elásticos em Ortodontia Comportamento e Aplicação Clínica 184Documento15 páginasElásticos em Ortodontia Comportamento e Aplicação Clínica 184Leonardo Lamim95% (19)
- Benedicto 2013 Principais Alterações Do CEO 2012Documento13 páginasBenedicto 2013 Principais Alterações Do CEO 2012Eryson Thiago PradoAinda não há avaliações
- ARTESE 2011 Critérios para o Diagnóstico e Tratamento Estável Da Mordida Aberta Anterior PDFDocumento26 páginasARTESE 2011 Critérios para o Diagnóstico e Tratamento Estável Da Mordida Aberta Anterior PDFEryson Thiago PradoAinda não há avaliações
- Decreto Estadual 15.299 2013Documento10 páginasDecreto Estadual 15.299 2013Eryson Thiago PradoAinda não há avaliações
- Poder Do ShotDocumento4 páginasPoder Do ShotEryson Thiago PradoAinda não há avaliações
- Residuos de Serviço de Saúde Risco A CatadoresDocumento6 páginasResiduos de Serviço de Saúde Risco A CatadoresEryson Thiago PradoAinda não há avaliações
- Camara e Martins 2017 PaofDocumento12 páginasCamara e Martins 2017 PaofEryson Thiago PradoAinda não há avaliações
- ABOR 2015 Princípios Básicos e Aplicação Da Biomecânica - Livro ABOR 2015Documento12 páginasABOR 2015 Princípios Básicos e Aplicação Da Biomecânica - Livro ABOR 2015Eryson Thiago PradoAinda não há avaliações
- GT7 651 647 20100902102153Documento17 páginasGT7 651 647 20100902102153Paulo WilkomAinda não há avaliações
- Dec Est #16142 de 14-08-2015 - Estadual - Campanha de Cadastramento de Usuários de Recursos HídricosDocumento2 páginasDec Est #16142 de 14-08-2015 - Estadual - Campanha de Cadastramento de Usuários de Recursos HídricosEryson Thiago PradoAinda não há avaliações
- Manual Do CNARH 012009 ANA 2009 PDFDocumento85 páginasManual Do CNARH 012009 ANA 2009 PDFEryson Thiago PradoAinda não há avaliações
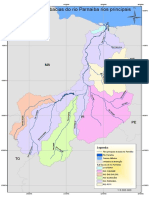
- Subbacias Do Rio Parnaiba e TributariosDocumento1 páginaSubbacias Do Rio Parnaiba e TributariosEryson Thiago PradoAinda não há avaliações
- Mapa PiauiDocumento1 páginaMapa Piaui958269Ainda não há avaliações
- Conjunção Explicação e AtividadesDocumento3 páginasConjunção Explicação e AtividadesjrfreitasprAinda não há avaliações
- Como Elaborar Memorial Descritivo de ArquiteturaDocumento5 páginasComo Elaborar Memorial Descritivo de ArquiteturaMarcelo CardosoAinda não há avaliações
- Slides Oficiais Da Qualificação - 20 Dezembro 2022 AtualizadoDocumento21 páginasSlides Oficiais Da Qualificação - 20 Dezembro 2022 AtualizadoGlauber PinheiroAinda não há avaliações
- TCC DiegoDocumento61 páginasTCC DiegoMilena RochaAinda não há avaliações
- Curso de Administrador de Banco de Dados Oracle 11g - Fundamentals I - SQL e SQLPLUS em Porto Alegre, Na T@RgetTrustDocumento21 páginasCurso de Administrador de Banco de Dados Oracle 11g - Fundamentals I - SQL e SQLPLUS em Porto Alegre, Na T@RgetTrustRicardo FredericoAinda não há avaliações
- NR-13. Apresentação TRABALHOpptDocumento18 páginasNR-13. Apresentação TRABALHOpptbordrinAinda não há avaliações
- Komeco20di - ManualDocumento13 páginasKomeco20di - ManualEduardoAinda não há avaliações
- Guia Do Corretor ExcelsiorDocumento17 páginasGuia Do Corretor ExcelsiorRoberta FidellisAinda não há avaliações
- TCF Mudanças ClimáticasDocumento17 páginasTCF Mudanças ClimáticasFrancisco GalvãoAinda não há avaliações
- ExercíciosDocumento4 páginasExercíciosPaulo JúniorAinda não há avaliações
- Tribuna-Espirita-nº-184 EsquizofreniaDocumento28 páginasTribuna-Espirita-nº-184 EsquizofreniaMarcosPaterraAinda não há avaliações
- 1649960368008nr 26 e NBR 7195 As Normas Essenciais para Quem Trabalha Com Sinalizacao Viaria de Seguranca 1Documento6 páginas1649960368008nr 26 e NBR 7195 As Normas Essenciais para Quem Trabalha Com Sinalizacao Viaria de Seguranca 1Tainá AlmeidaAinda não há avaliações
- NTC35Documento141 páginasNTC35Alessandro OliveiraAinda não há avaliações
- Correios - Minhas Importações 2Documento1 páginaCorreios - Minhas Importações 2Sheila GabrielyAinda não há avaliações
- Florilegios Espirituais - Divaldo FrancoDocumento60 páginasFlorilegios Espirituais - Divaldo FrancoSheilaAinda não há avaliações
- Pressões AnormaisDocumento38 páginasPressões AnormaisLuiz Antonio Pereira0% (1)
- Umbanda SertanejaDocumento240 páginasUmbanda SertanejaHermes De Sousa VerasAinda não há avaliações
- CONSOLOS CURTOS ALTA REST Sad - Fabiokassouf - MDocumento122 páginasCONSOLOS CURTOS ALTA REST Sad - Fabiokassouf - MGabriel SilvaAinda não há avaliações
- 4p119e05 01Documento9 páginas4p119e05 01Pandora RostyAinda não há avaliações
- Os Doze Passos de Aa ComentadoDocumento9 páginasOs Doze Passos de Aa ComentadoTania Maria Ferraz ContrimAinda não há avaliações
- Questões de Concurso - Professores Da Educação Infantil.Documento6 páginasQuestões de Concurso - Professores Da Educação Infantil.Anonymous aPzoIa4Ainda não há avaliações
- Fispq - Detergente Girando SolDocumento5 páginasFispq - Detergente Girando SolAna Guberte50% (2)
- Orçamento e Controlo OrçamentalDocumento17 páginasOrçamento e Controlo OrçamentalGambasGambas0% (1)
- Relatório RC e RLDocumento14 páginasRelatório RC e RLAriel HennigAinda não há avaliações
- O Que É Comunicação para VocêDocumento2 páginasO Que É Comunicação para VocêCinthia KeliAinda não há avaliações
- Ficha SucuboDocumento1 páginaFicha SucuboEDURGAinda não há avaliações
- Capitulo 6 O Interregno Café FilhoDocumento3 páginasCapitulo 6 O Interregno Café FilhoLaizAinda não há avaliações
- E-Voo - Aeromodelismo Elétrico - Turnigy 9x v2 - RECEPTORES COMPATIVEIS !!! PDFDocumento8 páginasE-Voo - Aeromodelismo Elétrico - Turnigy 9x v2 - RECEPTORES COMPATIVEIS !!! PDFluiz33Ainda não há avaliações
- Roda de GenebraDocumento11 páginasRoda de GenebraBruno Ferreira Couto0% (1)
- Apostila de Portugues para Concursos - Estrutura Das PalavrasDocumento2 páginasApostila de Portugues para Concursos - Estrutura Das PalavrasmarcelobooksAinda não há avaliações