Você também pode gostar
- Instrumentos de Aeronaves: Guia CompletoDocumento88 páginasInstrumentos de Aeronaves: Guia CompletoRonaldoePatricia AraujoAinda não há avaliações
- Tutorial Placa de Identificação de Motores ElétricosDocumento6 páginasTutorial Placa de Identificação de Motores ElétricosMarco Colaneri100% (3)
- Projeto Forno Indução UNoveDocumento18 páginasProjeto Forno Indução UNoverodrigopeddrosa0% (1)
- Condutores Elétricos PDFDocumento6 páginasCondutores Elétricos PDFaltamirandodapaz@msn.comAinda não há avaliações
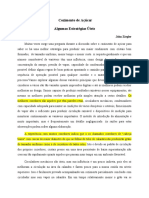
- Estratégias para um cozimento de açúcar mais eficienteDocumento18 páginasEstratégias para um cozimento de açúcar mais eficienteJavier Manuel Ibanez100% (1)
- Movimento relativo em eixos em rotaçãoDocumento9 páginasMovimento relativo em eixos em rotaçãoTiago BritoAinda não há avaliações
- Cinemética Dos Corpos RígidosDocumento34 páginasCinemética Dos Corpos RígidosandreflsoaresAinda não há avaliações
- S07 - Mov. Rotacional y TraslacionalDocumento22 páginasS07 - Mov. Rotacional y TraslacionalNaty Paola Torres RojasAinda não há avaliações
- É Representado em Radiano (Rad) : Movimento CircularDocumento4 páginasÉ Representado em Radiano (Rad) : Movimento CircularNicollyAinda não há avaliações
- 4.1-Cinematica Do SolidoDocumento58 páginas4.1-Cinematica Do SolidoEduardo BittencourtAinda não há avaliações
- FG1 2122 Aula08Documento30 páginasFG1 2122 Aula08Duarte MotaAinda não há avaliações
- Análise de Velocidades em MecanismosDocumento12 páginasAnálise de Velocidades em Mecanismostheuseguigo CazarinAinda não há avaliações
- Aula 3Documento25 páginasAula 3Lucas KangAinda não há avaliações
- Cap11 - Cinemática Rotacional - Material de Introdução À Mecânica ClássicaDocumento10 páginasCap11 - Cinemática Rotacional - Material de Introdução À Mecânica ClássicaMoisés AlvesAinda não há avaliações
- Aula 2 CSDocumento38 páginasAula 2 CSTábata Pedaes100% (1)
- Cames e SeguidoresDocumento57 páginasCames e SeguidoresTEfrom100% (1)
- Aula - Cinemática de RotaçãoDocumento14 páginasAula - Cinemática de RotaçãoFernandoAinda não há avaliações
- Mcu Parte 2Documento43 páginasMcu Parte 2Jaymilly Evelyn SilvaAinda não há avaliações
- Cap8 CamesDocumento26 páginasCap8 CamesBruno Costa de MirandaAinda não há avaliações
- Aula 06 - Movimento Circular Uniforme 2023Documento12 páginasAula 06 - Movimento Circular Uniforme 2023Jheison LopesAinda não há avaliações
- Aula 8 - Escoamento em Bombas e VentiladoresDocumento52 páginasAula 8 - Escoamento em Bombas e VentiladoresaleftgomesAinda não há avaliações
- Ac Tang NormalDocumento6 páginasAc Tang NormalGilmar Aparecido CostaAinda não há avaliações
- Slides MovimentoCurvilíneoDocumento6 páginasSlides MovimentoCurvilíneoStefani OliveiraAinda não há avaliações
- Aula 2 - Movimento CircularDocumento27 páginasAula 2 - Movimento Circularjoaquimj283Ainda não há avaliações
- Unidade - 2.1 - Cinemática Do Movimento Do Plano de Um Corpo RígidoDocumento14 páginasUnidade - 2.1 - Cinemática Do Movimento Do Plano de Um Corpo RígidoXay NevesAinda não há avaliações
- Cinematica de Corpos Rigidos Parte IDocumento20 páginasCinematica de Corpos Rigidos Parte Ipaulacristina.conteudistaAinda não há avaliações
- Lista 06 - DInâmica CurvilíneaDocumento8 páginasLista 06 - DInâmica CurvilíneaLeonardo SilvaAinda não há avaliações
- Ficha 15Documento4 páginasFicha 15AnaAinda não há avaliações
- Lista Cinem - Solidos 2Documento2 páginasLista Cinem - Solidos 2Pedro MaregaAinda não há avaliações
- Captura de Tela 2022-11-09 À(s) 07.38.40Documento39 páginasCaptura de Tela 2022-11-09 À(s) 07.38.40ana laura assunçãoAinda não há avaliações
- Nota de Aula 2 Bimentre 2Documento38 páginasNota de Aula 2 Bimentre 2Lucas Ramos Barbosa0% (1)
- 5 - O Movimento CircularDocumento3 páginas5 - O Movimento CircularFernando AssisAinda não há avaliações
- Lista Cap 15Documento4 páginasLista Cap 15CHARLESTON JOSE DA SILVA ROICE FILHOAinda não há avaliações
- Lista 1VADocumento5 páginasLista 1VADeivisonGomesAinda não há avaliações
- Momento AngularDocumento29 páginasMomento AngularMarcos CastroAinda não há avaliações
- Cinemática da Rotação: Lista de Exercícios com Problemas de Movimento RotacionalDocumento3 páginasCinemática da Rotação: Lista de Exercícios com Problemas de Movimento RotacionalAna Beatriz MaiczukAinda não há avaliações
- Exercicios de Fisica Sobre o Movimento CircularDocumento4 páginasExercicios de Fisica Sobre o Movimento CircularSadi ParruqueAinda não há avaliações
- 12 - Cinematica Dos Corpos Rigidos-1Documento44 páginas12 - Cinematica Dos Corpos Rigidos-1Joana CostaAinda não há avaliações
- Lista 4Documento2 páginasLista 4CARLOSAinda não há avaliações
- Ficha de exercícios de Física para o 11o ano com questões sobre movimento circular uniformeDocumento5 páginasFicha de exercícios de Física para o 11o ano com questões sobre movimento circular uniformeShelton MachianaAinda não há avaliações
- Cinemática Dos Corpos RígidosDocumento21 páginasCinemática Dos Corpos RígidosFernanda ClainAinda não há avaliações
- Lista - Movimento CircularDocumento5 páginasLista - Movimento Circularpeter.paul.agostiniAinda não há avaliações
- Lista 7Documento3 páginasLista 7Luiz FelipeAinda não há avaliações
- ListarotacoesDocumento7 páginasListarotacoesdnielemilaioAinda não há avaliações
- Atividade de Revisão - Cinemática rotacional 1Documento2 páginasAtividade de Revisão - Cinemática rotacional 1davidamossilva18Ainda não há avaliações
- CAMESDocumento17 páginasCAMESPedro HenriqueAinda não há avaliações
- FG1 2022 Ficha7Documento4 páginasFG1 2022 Ficha7Team TeaAinda não há avaliações
- Cinemática de corpo rígido: 10 exercíciosDocumento5 páginasCinemática de corpo rígido: 10 exercíciosPedro SchuchterAinda não há avaliações
- FG1 2022 Ficha6Documento2 páginasFG1 2022 Ficha6Team TeaAinda não há avaliações
- Cinemática dos Sólidos - Problemas ResolvidosDocumento5 páginasCinemática dos Sólidos - Problemas ResolvidosBruno AlvesAinda não há avaliações
- Movimento circular: velocidade, aceleração e relaçõesDocumento5 páginasMovimento circular: velocidade, aceleração e relaçõesLuana GriloAinda não há avaliações
- Lista de exercícios de mecânica com 5 questões sobre movimento de corpos rígidosDocumento2 páginasLista de exercícios de mecânica com 5 questões sobre movimento de corpos rígidosCaio ZavarezziAinda não há avaliações
- Movimento Circular UniformeDocumento25 páginasMovimento Circular UniformeEloisa NascimentoAinda não há avaliações
- Cinemática de máquinas - Rotação e movimentos compostosDocumento11 páginasCinemática de máquinas - Rotação e movimentos compostosRicardo CostaAinda não há avaliações
- Dinâmica das Máquinas - Lista 1Documento5 páginasDinâmica das Máquinas - Lista 1Felipe MascarenhasAinda não há avaliações
- Lista5 CinematicaDaRotacaoDocumento6 páginasLista5 CinematicaDaRotacaofranciscopitramuilaAinda não há avaliações
- Aula Teórica 04 22.23 Cinemática Da Rotação em Torno de Eixo FixoDocumento3 páginasAula Teórica 04 22.23 Cinemática Da Rotação em Torno de Eixo FixoZé engenheiroAinda não há avaliações
- Clássica II - Unidade 2 - CompiladoDocumento27 páginasClássica II - Unidade 2 - CompiladoDamião Alves Da SilvaAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Ensaios traçãoDocumento37 páginasEnsaios traçãoStefani OliveiraAinda não há avaliações
- Curso Engenharia Mecânica Prova Mecânica GeralDocumento1 páginaCurso Engenharia Mecânica Prova Mecânica GeralStefani OliveiraAinda não há avaliações
- Lista 1Documento2 páginasLista 1Stefani OliveiraAinda não há avaliações
- IFSP Lista Mecânica GeralDocumento1 páginaIFSP Lista Mecânica GeralStefani OliveiraAinda não há avaliações
- Lista 2Documento2 páginasLista 2Stefani OliveiraAinda não há avaliações
- Ensaios traçãoDocumento37 páginasEnsaios traçãoStefani OliveiraAinda não há avaliações
- Normas ISO e ASTM Ensaio de TraçãoDocumento7 páginasNormas ISO e ASTM Ensaio de TraçãoStefani OliveiraAinda não há avaliações
- ASTM E 8 Yr 13.en - PTDocumento28 páginasASTM E 8 Yr 13.en - PTStefani OliveiraAinda não há avaliações
- Slides MovimentoCurvilíneoDocumento6 páginasSlides MovimentoCurvilíneoStefani OliveiraAinda não há avaliações
- 1 Avaliação Da Etapa 1 - HIDRÁULICA IDocumento4 páginas1 Avaliação Da Etapa 1 - HIDRÁULICA IElana AdriaAinda não há avaliações
- TE 158 Operação de Sistemas Elétricos de Potência Lista de Exercícios. Fator de PotênciaDocumento12 páginasTE 158 Operação de Sistemas Elétricos de Potência Lista de Exercícios. Fator de PotênciaJose De Jesus Silva CardosoAinda não há avaliações
- Ensaio de Determinação Da Densidade Real Do SoloDocumento7 páginasEnsaio de Determinação Da Densidade Real Do SoloJulio LopesAinda não há avaliações
- Manual Tensiômetro PDFDocumento14 páginasManual Tensiômetro PDFviviane_santarosa100% (1)
- Relatorio 07 - Calor de Fusão Do GeloDocumento4 páginasRelatorio 07 - Calor de Fusão Do GeloMaria SidorAinda não há avaliações
- Operações de perfuração em mineraçãoDocumento197 páginasOperações de perfuração em mineraçãoRubens Felipe FilhoAinda não há avaliações
- Física Exercícios ResolvidosDocumento8 páginasFísica Exercícios ResolvidosVítor FurkelAinda não há avaliações
- EletroestáticaDocumento4 páginasEletroestáticaAllan ClementeAinda não há avaliações
- PME2230.RL - Escoamento Turbulento - Medidores PDFDocumento18 páginasPME2230.RL - Escoamento Turbulento - Medidores PDFEdmilson DuarteAinda não há avaliações
- Diodo SemicondutorDocumento33 páginasDiodo SemicondutorRicardo CesarAinda não há avaliações
- Exercícios de Fixação sobre Resistência ElétricaDocumento3 páginasExercícios de Fixação sobre Resistência ElétricaRau LuhAinda não há avaliações
- Circuitos com diodos da UFABCDocumento7 páginasCircuitos com diodos da UFABCLuiza dos Santos MattosAinda não há avaliações
- Modulo 01Documento12 páginasModulo 01DarlanSilveiraSantosAinda não há avaliações
- Eletrostática GeralDocumento4 páginasEletrostática GeralAlexandre das Graças NengaAinda não há avaliações
- Efeito Joule: Leis de Ohm e KirchhoffDocumento6 páginasEfeito Joule: Leis de Ohm e KirchhoffAdiel LourençoAinda não há avaliações
- Lista 5 - Ondas IDocumento4 páginasLista 5 - Ondas ILucas RenanAinda não há avaliações
- Aula1 SPICEDocumento38 páginasAula1 SPICECarlos RubimAinda não há avaliações
- Prova de Física I Do 2º AnoDocumento4 páginasProva de Física I Do 2º Anomarcosbem2Ainda não há avaliações
- Conservação Da Energia Mecânica - Profº. JBDocumento12 páginasConservação Da Energia Mecânica - Profº. JBIgor SousaAinda não há avaliações
- Refrigeração e Ar-Condicionado (Portugués) Autor Luiz Carlos MartinelliDocumento39 páginasRefrigeração e Ar-Condicionado (Portugués) Autor Luiz Carlos MartinellihassanchaarAinda não há avaliações
- Cms Files 54701 1654296848apostila Eletrogate - Kit Arduino MakerDocumento80 páginasCms Files 54701 1654296848apostila Eletrogate - Kit Arduino MakerroselitoAinda não há avaliações
- Quantidade de Movimento e ImpulsoDocumento5 páginasQuantidade de Movimento e ImpulsoJonas Carlos SantanaAinda não há avaliações
- Resmat - Notas de AulaDocumento7 páginasResmat - Notas de AulaGiovanni Chaves MoreiraAinda não há avaliações
- Prova Eear 2022 SeleçãoDocumento4 páginasProva Eear 2022 SeleçãoTORRES PREPARATÓRIO MILITARAinda não há avaliações