Você também pode gostar
- Transformada z inversa: métodos para cálculoDocumento5 páginasTransformada z inversa: métodos para cálculoJessica FerreiraAinda não há avaliações
- Aula6 LGRDocumento10 páginasAula6 LGRFelipe AcquatiAinda não há avaliações
- Controle I - Exemplos do Lugar das Raízes Geométrico (LRGDocumento32 páginasControle I - Exemplos do Lugar das Raízes Geométrico (LRGNatalia SilvaAinda não há avaliações
- Bandas de Energia nos CristaisDocumento8 páginasBandas de Energia nos CristaisJoel Augusto Moura PortoAinda não há avaliações
- Bandas de Energia nos CristaisDocumento8 páginasBandas de Energia nos CristaisJoel Augusto Moura PortoAinda não há avaliações
- LGR: Técnica do Lugar Geométrico das RaízesDocumento30 páginasLGR: Técnica do Lugar Geométrico das RaízesNatalia SilvaAinda não há avaliações
- Transferência de Calor em ParedesDocumento29 páginasTransferência de Calor em ParedesMarcelo CheconAinda não há avaliações
- Formulario Analise de Circuitos EletricosDocumento6 páginasFormulario Analise de Circuitos EletricosOseias CardosoAinda não há avaliações
- Controle de Sistemas Dinâmicos de 1a e 2a OrdemDocumento8 páginasControle de Sistemas Dinâmicos de 1a e 2a OrdemCleber RodriguesAinda não há avaliações
- Aula 21 2023 Circuitos 1a Ordem Versao Apos AulaDocumento26 páginasAula 21 2023 Circuitos 1a Ordem Versao Apos AulaTassyla LimaAinda não há avaliações
- 5.º Teste - V1Documento8 páginas5.º Teste - V1Nuno InverneiroAinda não há avaliações
- Aula3 2Documento34 páginasAula3 2Lucas AssisAinda não há avaliações
- TSS Aula 06 PDFDocumento22 páginasTSS Aula 06 PDFAristides AnselmoAinda não há avaliações
- Relés de Distância para Proteção de Linhas de TransmissãoDocumento14 páginasRelés de Distância para Proteção de Linhas de Transmissãoigoramin100% (1)
- Modelo de Drude-Lorentz e propriedades de metaisDocumento18 páginasModelo de Drude-Lorentz e propriedades de metaisMatheus FairbancksAinda não há avaliações
- 12 - FÇ Inversa Trigonométricas, Hiperbólicas e Suas DerivadasDocumento37 páginas12 - FÇ Inversa Trigonométricas, Hiperbólicas e Suas DerivadasBianca RamosAinda não há avaliações
- Circuitos não sinusoidaisDocumento6 páginasCircuitos não sinusoidaisSimao RaivaAinda não há avaliações
- Formulário - Matemáica A - GeometriaDocumento2 páginasFormulário - Matemáica A - GeometriaBruna MachadoAinda não há avaliações
- Teste Matemática A 12o AnoDocumento12 páginasTeste Matemática A 12o AnoMarta SimõesAinda não há avaliações
- Teste3 - 12 - Enunciado PDFDocumento8 páginasTeste3 - 12 - Enunciado PDFMartim LemeAinda não há avaliações
- AnaliseDocumento10 páginasAnalisegean de medeiros vidalAinda não há avaliações
- 7 Razoes Trigonometricas de Angulos Generalizados 11Documento18 páginas7 Razoes Trigonometricas de Angulos Generalizados 11Gonçalo NascimentoAinda não há avaliações
- Edicoes ASA 12 Ano 2022 23 4 TesteDocumento13 páginasEdicoes ASA 12 Ano 2022 23 4 TesteRicardo Fernandes OliveiraAinda não há avaliações
- Exame Modelo (Texto Editores)Documento18 páginasExame Modelo (Texto Editores)sonia silvaAinda não há avaliações
- 5.º Teste - FaltososDocumento7 páginas5.º Teste - FaltososNuno InverneiroAinda não há avaliações
- Aula01 Transformada de Laplace e Sua InversaDocumento39 páginasAula01 Transformada de Laplace e Sua InversaGuilherme Américo RosaAinda não há avaliações
- Teste de Matemática A com problemas de probabilidade, combinatória e funçõesDocumento12 páginasTeste de Matemática A com problemas de probabilidade, combinatória e funçõescarolinaAinda não há avaliações
- Teste de Matemática A com probabilidades, funções e progressõesDocumento5 páginasTeste de Matemática A com probabilidades, funções e progressõesCarlahjojbnnjjkkkiklkkpjpjpjjmm PintoAinda não há avaliações
- Material - Suporte - Fenômenos IIDocumento18 páginasMaterial - Suporte - Fenômenos IIKaren de Sá GomesAinda não há avaliações
- Centro Universitário Da FEIDocumento3 páginasCentro Universitário Da FEIMatheus PrevedelAinda não há avaliações
- 1 - TRIGONOMETRIA - Resolução de Triângulos Quaisquer - Lei Dos Senos e Dos Cossenos.2Documento1 página1 - TRIGONOMETRIA - Resolução de Triângulos Quaisquer - Lei Dos Senos e Dos Cossenos.2Erinaldo AmaralAinda não há avaliações
- Circuitos RLC em série sem fonteDocumento156 páginasCircuitos RLC em série sem fonteThayannã YuryAinda não há avaliações
- 01 - MSL - Sinais e sistemasDocumento39 páginas01 - MSL - Sinais e sistemasJosé Wilson Oliveira SilvaAinda não há avaliações
- Aula9 Lugar Geométrico Das RaizesDocumento22 páginasAula9 Lugar Geométrico Das Raizesalan marquesAinda não há avaliações
- Aula SS - Tema 18 - Cálculo Da ConvoluçãoDocumento31 páginasAula SS - Tema 18 - Cálculo Da ConvoluçãoAlex Sandro BoroskiAinda não há avaliações
- 07 - MSL - Frequência (1)Documento53 páginas07 - MSL - Frequência (1)José Wilson Oliveira SilvaAinda não há avaliações
- Induções em LT paralelasDocumento16 páginasInduções em LT paralelasVITOR EDUARDO DOS SANTOSAinda não há avaliações
- Alan Lucas - MétAproxDocumento30 páginasAlan Lucas - MétAproxkhc2v7vhpyAinda não há avaliações
- Teorema de Kennelly em Circuitos CADocumento6 páginasTeorema de Kennelly em Circuitos CAMarcelo FernandesAinda não há avaliações
- Modelagem de Sistemas Meca NicosDocumento23 páginasModelagem de Sistemas Meca NicosDavid de Almeida FiorilloAinda não há avaliações
- Análise de curto-circuito trifásico e bifásico em sistemas de potênciaDocumento26 páginasAnálise de curto-circuito trifásico e bifásico em sistemas de potênciaRodrigo Prado de MedeirosAinda não há avaliações
- 4 - Polinômios de LegendreDocumento19 páginas4 - Polinômios de LegendreGiordanio NovaesAinda não há avaliações
- Coordenadas Polares e Cálculo de ÁreasDocumento61 páginasCoordenadas Polares e Cálculo de ÁreasRenataRochaAinda não há avaliações
- Teste 3 - Expoente12 Com Res (2022-2023)Documento13 páginasTeste 3 - Expoente12 Com Res (2022-2023)Isabel TavaresAinda não há avaliações
- Teste 3 - Expoente12Documento6 páginasTeste 3 - Expoente12Marta CamposAinda não há avaliações
- TESTE DE MATEMÁTICA MOCK 2021Documento9 páginasTESTE DE MATEMÁTICA MOCK 2021A José M Antunes100% (3)
- Relatório 5 - Amplificador Operacional SintonizadoDocumento8 páginasRelatório 5 - Amplificador Operacional SintonizadoAdriane França100% (1)
- Sistemas de controle por diagramas de blocosDocumento45 páginasSistemas de controle por diagramas de blocosPedro Minante100% (1)
- Teste de Matemática A: Probabilidades, Progressões e GeometriaDocumento6 páginasTeste de Matemática A: Probabilidades, Progressões e GeometriaJoão MartinsAinda não há avaliações
- Etapa 2 Pas Uem 2022Documento20 páginasEtapa 2 Pas Uem 2022Gabriela MarcheseAinda não há avaliações
- Cap 10 - Teoria de rotoresDocumento31 páginasCap 10 - Teoria de rotoresProjetos DiversosAinda não há avaliações
- Ficha - Polinómios PaginaDocumento2 páginasFicha - Polinómios Paginajesdomingos008Ainda não há avaliações
- Aula 2 - Caminhos - e - CircuitosDocumento42 páginasAula 2 - Caminhos - e - CircuitosRafael100% (1)
- Materiais - Discordâncias e deformação plásticaDocumento56 páginasMateriais - Discordâncias e deformação plásticaneombaAinda não há avaliações
- Eletromagnetismo I - Aula 08 - Campo Eletromagnético em Um Condutor RetilíneoDocumento15 páginasEletromagnetismo I - Aula 08 - Campo Eletromagnético em Um Condutor RetilíneoLeandro SilvaAinda não há avaliações
- MatemáticaDocumento25 páginasMatemáticamartinsadriana248Ainda não há avaliações
- Análise de Sistemas de Potência I - Matrizes YBarra e ZBarraDocumento29 páginasAnálise de Sistemas de Potência I - Matrizes YBarra e ZBarraErica SerbetoAinda não há avaliações
- Avaliação Virtual - Introdução À Analíse EstruturalDocumento4 páginasAvaliação Virtual - Introdução À Analíse EstruturalRômulo CarvalhoAinda não há avaliações
- Discalculia e JogosDocumento12 páginasDiscalculia e Jogoscristinarodrigues80Ainda não há avaliações
- Eletricidade 180h [Salvo Automaticamente]Documento708 páginasEletricidade 180h [Salvo Automaticamente]TSCHERLY KLEBER DA SILVA NEIVAAinda não há avaliações
- Álgebra 12 Problemas Envolvendo SistemasDocumento3 páginasÁlgebra 12 Problemas Envolvendo SistemascarolinaAinda não há avaliações
- Análise em Variedades - Luis Florit PDFDocumento30 páginasAnálise em Variedades - Luis Florit PDFGerman ChiappeAinda não há avaliações
- 07 APP651R ProtectionElementsLogic r13 MMDocumento65 páginas07 APP651R ProtectionElementsLogic r13 MMAlison RodrigoAinda não há avaliações
- Gerador CC Job NewDocumento23 páginasGerador CC Job NewAlex Chaquibo AbooAinda não há avaliações
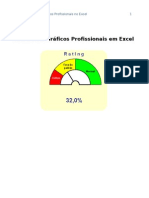
- Como criar gráficos profissionais no ExcelDocumento66 páginasComo criar gráficos profissionais no ExceldiegojotasilvaAinda não há avaliações
- Múltiplos divisores números primos aulas matemática 7o anoDocumento4 páginasMúltiplos divisores números primos aulas matemática 7o anoEden Carlos de SouzaAinda não há avaliações
- Defeitos cristalinos em 40Documento5 páginasDefeitos cristalinos em 40MarcosAinda não há avaliações
- Aplicacao Da Pesquisa Operacional Na Reducao de Custos de Uma Industria CimenteiraDocumento20 páginasAplicacao Da Pesquisa Operacional Na Reducao de Custos de Uma Industria CimenteiraLuis CarlosAinda não há avaliações
- Alimentos e animais em LibrasDocumento42 páginasAlimentos e animais em LibrasSilasFiorella100% (3)
- A6 - Circuito RCDocumento7 páginasA6 - Circuito RCVinicius MoraesAinda não há avaliações
- Converter Hexadecimal 9F para DecimalDocumento7 páginasConverter Hexadecimal 9F para DecimaljuninhoAinda não há avaliações
- Revisão de Geografia com Pontos CardeaisDocumento4 páginasRevisão de Geografia com Pontos CardeaisanacachinhoAinda não há avaliações
- Aprendizagem Situada GuzzoDocumento9 páginasAprendizagem Situada GuzzoMelvin JeffersonAinda não há avaliações
- Experimento Mesa de GaltonDocumento14 páginasExperimento Mesa de GaltonPETRUCIO BARROZO DA SILVAAinda não há avaliações
- Teste Final Mod A1Documento3 páginasTeste Final Mod A1Eleuterio Monteiro50% (2)
- Técnicas de CAD para Engenharia Civil (UFRJ)Documento69 páginasTécnicas de CAD para Engenharia Civil (UFRJ)Guilherme FernandesAinda não há avaliações
- Sistemas Lineares com Múltiplos Lados Direitos e Projeções de KrylovDocumento7 páginasSistemas Lineares com Múltiplos Lados Direitos e Projeções de KrylovMarcilene RodriguesAinda não há avaliações
- Juros Simples e Compostos AulaDocumento3 páginasJuros Simples e Compostos AulaLilian Silva100% (1)
- Lista sobre matrizesDocumento3 páginasLista sobre matrizesaaAinda não há avaliações
- Campo elétrico produzido por cargas elétricasDocumento55 páginasCampo elétrico produzido por cargas elétricasRuth NogueiraAinda não há avaliações
- Reconhecimento Das Classes GramaticaisDocumento7 páginasReconhecimento Das Classes GramaticaisVitoria ConstâncioAinda não há avaliações


































































![Eletricidade 180h [Salvo Automaticamente]](https://imgv2-2-f.scribdassets.com/img/document/720310588/149x198/4976240ec8/1712323351?v=1)