Você também pode gostar
- Motores de Indução: Conceitos e Circuito EquivalenteDocumento25 páginasMotores de Indução: Conceitos e Circuito EquivalentePaulo Manuel Paulo PMAinda não há avaliações
- Motores de InduçãoDocumento16 páginasMotores de InduçãoSérgio FerreiraAinda não há avaliações
- Motor IndutivoDocumento21 páginasMotor IndutivoUilerAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Aula 7 e 8 Teoria Maquinas Electricas I - ISPUNADocumento25 páginasAula 7 e 8 Teoria Maquinas Electricas I - ISPUNABlame PeterAinda não há avaliações
- Velocidade Angular Síncrona: Motor de InduçãoDocumento24 páginasVelocidade Angular Síncrona: Motor de InduçãoRhuan GamaAinda não há avaliações
- Relatório de experimento de tensão e frequência induzida em rotor de motor de induçãoDocumento12 páginasRelatório de experimento de tensão e frequência induzida em rotor de motor de induçãoBrenda Montes Cardoso FarahAinda não há avaliações
- Simulação MIT - MATLABDocumento14 páginasSimulação MIT - MATLABMarco Aurélio FrançaAinda não há avaliações
- Motor Assíncrono: Qualidades e FuncionamentoDocumento14 páginasMotor Assíncrono: Qualidades e FuncionamentoLucyana RosaAinda não há avaliações
- Máquinas de Indução: Construção, Conceitos e Escorregamento do RotorDocumento30 páginasMáquinas de Indução: Construção, Conceitos e Escorregamento do RotorWagner Menezes100% (1)
- Motores de indução trifásicos: princípio de funcionamento e análise do rotorDocumento10 páginasMotores de indução trifásicos: princípio de funcionamento e análise do rotorLMO007Ainda não há avaliações
- Relatório Impedância SíncronaDocumento16 páginasRelatório Impedância SíncronaTiago Leite100% (1)
- Aula ATPDrawDocumento54 páginasAula ATPDrawJoão Contreiras100% (1)
- Apostila Máquinas Elétricas IFCE Pecém - Cap10Documento25 páginasApostila Máquinas Elétricas IFCE Pecém - Cap10Wagner MenezesAinda não há avaliações
- Geradores CA: princípio e tiposDocumento21 páginasGeradores CA: princípio e tiposfaeduardoAinda não há avaliações
- Aula 14Documento31 páginasAula 14Camila PereiraAinda não há avaliações
- Capítulo 3 e 4 - Elementos-24.05.2023Documento59 páginasCapítulo 3 e 4 - Elementos-24.05.2023João Lourenço CussondamaAinda não há avaliações
- Máquinas rotativas torque e tensão induzidaDocumento16 páginasMáquinas rotativas torque e tensão induzidadavidengautAinda não há avaliações
- 2017 06 07 MotoresdeIndução PostDocumento44 páginas2017 06 07 MotoresdeIndução PostCaique EduardoAinda não há avaliações
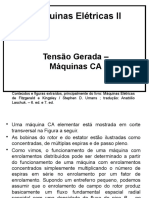
- Máquinas Elétricas II - Tensão Gerada Máquinas CADocumento16 páginasMáquinas Elétricas II - Tensão Gerada Máquinas CAsamuel augustoAinda não há avaliações
- Maquinas Indutivas ResumoDocumento7 páginasMaquinas Indutivas ResumoCaio FicheAinda não há avaliações
- Controle de velocidade de motor CCDocumento3 páginasControle de velocidade de motor CCPaulo SouzaAinda não há avaliações
- Efeito da resistência do rotor no torque e correnteDocumento4 páginasEfeito da resistência do rotor no torque e correnteanajulia16Ainda não há avaliações
- Inversor de frequência controla motores elétricosDocumento9 páginasInversor de frequência controla motores elétricosEmerson RuizAinda não há avaliações
- Exercicios ResolvidosDocumento8 páginasExercicios ResolvidosMiguel LoboAinda não há avaliações
- Aula 5Documento28 páginasAula 5Camila PereiraAinda não há avaliações
- Aula16 Circuito Equivalente Motor InducaoDocumento29 páginasAula16 Circuito Equivalente Motor Inducaoplayercops36Ainda não há avaliações
- Cap 2 Maquinasde Inducao PUCDocumento53 páginasCap 2 Maquinasde Inducao PUCAbednego Zano100% (1)
- Mse Aula 03 Motores Elétricos 12052022Documento77 páginasMse Aula 03 Motores Elétricos 12052022douglasncamiloAinda não há avaliações
- Ficha 4Documento4 páginasFicha 4NobercioAinda não há avaliações
- Diferença entre máquinas síncronas e de induçãoDocumento15 páginasDiferença entre máquinas síncronas e de induçãoCarlosAinda não há avaliações
- Ativ 6.1 - ExerAval05 - Pedro SilvérioDocumento4 páginasAtiv 6.1 - ExerAval05 - Pedro Silvérioadro.eng18Ainda não há avaliações
- Motor de InduçãoDocumento9 páginasMotor de InduçãoGuilherme Souza SantosAinda não há avaliações
- Máquinas de corrente contínua: princípios e aplicaçõesDocumento14 páginasMáquinas de corrente contínua: princípios e aplicaçõesAlexandre PachecoAinda não há avaliações
- Motor Indução 3Documento29 páginasMotor Indução 3Emanoel RibeiroAinda não há avaliações
- Determinação dos parâmetros de um motor CCDocumento6 páginasDeterminação dos parâmetros de um motor CCIago Oliveira deSouzaAinda não há avaliações
- Relatório Experimento 1 - Lab Máquinas - Turma 6.3Documento7 páginasRelatório Experimento 1 - Lab Máquinas - Turma 6.3David de Almeida FiorilloAinda não há avaliações
- Aula - 2 Motores de Corrente Contínua Com EscovasDocumento13 páginasAula - 2 Motores de Corrente Contínua Com EscovasCarlos Alexandre FerriAinda não há avaliações
- Aula19 MIsem ExerciciosDocumento54 páginasAula19 MIsem ExerciciosWembley OliveiraAinda não há avaliações
- Maquinas Sincrons - 1Documento17 páginasMaquinas Sincrons - 1Emanoel RibeiroAinda não há avaliações
- Estabilidade Transitória Cap 9Documento20 páginasEstabilidade Transitória Cap 9bmlbruno26Ainda não há avaliações
- Atividade 1 - Gabriel GomesDocumento13 páginasAtividade 1 - Gabriel GomesModestoAinda não há avaliações
- Estabilidade ElétricaDocumento60 páginasEstabilidade ElétricaIngrid MonteiroAinda não há avaliações
- Partida, Proteção e Comando de Motores de Indução TrifasicosDocumento5 páginasPartida, Proteção e Comando de Motores de Indução TrifasicosLuiz FernandoAinda não há avaliações
- Parâmetros de Uma Máquina Síncrona de Pólos LisosDocumento7 páginasParâmetros de Uma Máquina Síncrona de Pólos LisospcpontiniAinda não há avaliações
- Motores de Indução Trifásicos: Partida e Circuito EquivalenteDocumento56 páginasMotores de Indução Trifásicos: Partida e Circuito Equivalentedriano22100% (1)
- MIT InduçãoDocumento37 páginasMIT InduçãoDircSoarAinda não há avaliações
- Atividade 3.1Documento4 páginasAtividade 3.1Caik Cavalcante50% (2)
- ConversãoDocumento43 páginasConversãoRamon ResendeAinda não há avaliações
- Aula 4 - Máquinas de Indução - Revisão Circuito Equivalente MI - ExercicioDocumento18 páginasAula 4 - Máquinas de Indução - Revisão Circuito Equivalente MI - ExercicioCarlos OliboniAinda não há avaliações
- Aula de motores eletricos - ReparadoDocumento56 páginasAula de motores eletricos - ReparadoRodmam MouraAinda não há avaliações
- Aula03 MotoresElétricos COMELDocumento52 páginasAula03 MotoresElétricos COMELThiago Felipe NavarroAinda não há avaliações
- Fasiculo de Maquina ElDocumento40 páginasFasiculo de Maquina ElMateus SimbaAinda não há avaliações
- Motores Electricos de Corrente AlternadaDocumento13 páginasMotores Electricos de Corrente AlternadaCardoso CyprianoAinda não há avaliações
- Medidas protetivas urgênciaDocumento5 páginasMedidas protetivas urgênciavanessa françaAinda não há avaliações
- Material de Apoio para LíderesDocumento9 páginasMaterial de Apoio para LíderesTaís DanielleAinda não há avaliações
- Karate Zeon 250 Cs 1Documento10 páginasKarate Zeon 250 Cs 1Teste SaraivaAinda não há avaliações
- Aula 08Documento93 páginasAula 08Josielson LopesAinda não há avaliações
- Prova Matematica IV UnidadeDocumento4 páginasProva Matematica IV UnidadeLucilaineMariaJesusAinda não há avaliações
- Inspeção de SMS e SmaDocumento5 páginasInspeção de SMS e SmarenaldotstAinda não há avaliações
- Extração Do ADN Do Kiwi - Relatório Biologia 11ºDocumento2 páginasExtração Do ADN Do Kiwi - Relatório Biologia 11ºFrancisco Palaio67% (3)
- Os principais impostos em Angola e sua relevância na economiaDocumento8 páginasOs principais impostos em Angola e sua relevância na economiaManuela RitaAinda não há avaliações
- Aurélio Oliveira - História Dos Descobrimentos e Expansão Portuguesa-OcrDocumento384 páginasAurélio Oliveira - História Dos Descobrimentos e Expansão Portuguesa-OcrAlberto PaisAinda não há avaliações
- Ensinando MatemáticaDocumento19 páginasEnsinando MatemáticaMaycon AlmeidaAinda não há avaliações
- 701 Atividade 3Documento3 páginas701 Atividade 3Daniel BarrosAinda não há avaliações
- Angulos 6º AnoDocumento2 páginasAngulos 6º AnoJoana RamosAinda não há avaliações
- As Funções Da Responsabilidade Social No Marketing Social de Hoje. o Caso de Estudo Mcdonald S PortugalDocumento188 páginasAs Funções Da Responsabilidade Social No Marketing Social de Hoje. o Caso de Estudo Mcdonald S PortugalMargarida OliveiraAinda não há avaliações
- PROTETTI - A Burocracia Na Sociologia Da Dominação de Max Weber - Contribuições À Pesquisa EducacionalDocumento25 páginasPROTETTI - A Burocracia Na Sociologia Da Dominação de Max Weber - Contribuições À Pesquisa EducacionalFernando ProtettiAinda não há avaliações
- Métodos e Técnicas AdministrativasDocumento17 páginasMétodos e Técnicas Administrativasalisson caio50% (2)
- A invenção das ciências modernas segundo Isabelle StengersDocumento11 páginasA invenção das ciências modernas segundo Isabelle StengersMario Victor MargottoAinda não há avaliações
- Edital de Convocação para Lotação - 6 Convocação Ed 20Documento9 páginasEdital de Convocação para Lotação - 6 Convocação Ed 20Lucas PereiraAinda não há avaliações
- Gabarito Vestibular 2o Dia Tarde Grupo 1Documento17 páginasGabarito Vestibular 2o Dia Tarde Grupo 1flcbAinda não há avaliações
- O Fazendeiro MiguelDocumento21 páginasO Fazendeiro MiguelVirginia MarkovicAinda não há avaliações
- Regulamento de Pesquisa UFFSDocumento29 páginasRegulamento de Pesquisa UFFSSuianny Francini Luiz MichelonAinda não há avaliações
- Tratado de Anestesiologia SAESP Vol1Documento79 páginasTratado de Anestesiologia SAESP Vol1Henrique Machado100% (2)
- Manual 42 Licoes para Dobrar Lucro Da Fazenda - AgroTalento-BeefPointDocumento41 páginasManual 42 Licoes para Dobrar Lucro Da Fazenda - AgroTalento-BeefPointMarcosAinda não há avaliações
- Orientaes Ao Candidato Prova Tcnica Pee 2022Documento4 páginasOrientaes Ao Candidato Prova Tcnica Pee 2022Fortunato NetoAinda não há avaliações
- N 0011Documento41 páginasN 0011Rafael BritoAinda não há avaliações
- Manual Técnico - Respirador Inter Plus VapsDocumento92 páginasManual Técnico - Respirador Inter Plus VapsandreissantosAinda não há avaliações
- 01 Bound by Honor - Cora ReillyDocumento208 páginas01 Bound by Honor - Cora ReillyCarolina Izquierdo78% (9)
- EE47 - Montagem em Redes Subterrâneas - BT-IP (Caixas de União e Mangas)Documento9 páginasEE47 - Montagem em Redes Subterrâneas - BT-IP (Caixas de União e Mangas)RuiMãodeFerroAinda não há avaliações
- Minicurso de Antenas 5Documento60 páginasMinicurso de Antenas 5Aline DiasAinda não há avaliações
- Exercicio 1Documento1 páginaExercicio 1Lívia SimoAinda não há avaliações
- Psicologia Emergências DesastresDocumento5 páginasPsicologia Emergências DesastresDany QueirozAinda não há avaliações
- Treinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisNo EverandTreinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisNota: 4.5 de 5 estrelas4.5/5 (169)
- 365 Ideias De Posts Para Ter Um Instagram De Sucesso!No Everand365 Ideias De Posts Para Ter Um Instagram De Sucesso!Ainda não há avaliações
- Uma viagem pelo cérebro: A via rápida para entender neurociência: 1ª edição revisada e atualizadaNo EverandUma viagem pelo cérebro: A via rápida para entender neurociência: 1ª edição revisada e atualizadaNota: 4 de 5 estrelas4/5 (13)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Biomecânica Básica dos Exercícios: Membros InferioresNo EverandBiomecânica Básica dos Exercícios: Membros InferioresNota: 3.5 de 5 estrelas3.5/5 (8)
- Dieta Anti-inflamatória EstratégicaNo EverandDieta Anti-inflamatória EstratégicaNota: 5 de 5 estrelas5/5 (2)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Ser bom não é ser bonzinho: Como a comunicação não violenta e a arte do palhaço podem te ajudar a identificar e expressar as suas necessidades de maneira clara e autêntica – e evitar julgamentos, como o deste títuloNo EverandSer bom não é ser bonzinho: Como a comunicação não violenta e a arte do palhaço podem te ajudar a identificar e expressar as suas necessidades de maneira clara e autêntica – e evitar julgamentos, como o deste títuloNota: 5 de 5 estrelas5/5 (12)
- Hormonios E Fisiculturismo - Uso De Substâncias Para Aumento De PerformanceNo EverandHormonios E Fisiculturismo - Uso De Substâncias Para Aumento De PerformanceAinda não há avaliações
- Raciocínio lógico e matemática para concursos: Manual completoNo EverandRaciocínio lógico e matemática para concursos: Manual completoNota: 5 de 5 estrelas5/5 (1)