Você também pode gostar
- AAAIIISSSYYYDocumento9 páginasAAAIIISSSYYYjoyoAinda não há avaliações
- Exercicio Resolvido de CurtoDocumento125 páginasExercicio Resolvido de Curtoailsonmoura100% (1)
- Partida DiretaDocumento7 páginasPartida DiretatfeletronicaAinda não há avaliações
- Calculos de Curtos-Circuitos em Sistema de DistribuiçãoDocumento15 páginasCalculos de Curtos-Circuitos em Sistema de DistribuiçãoIgor PROJAinda não há avaliações
- Proteção de Linhas - INFEEDDocumento9 páginasProteção de Linhas - INFEEDAndré DuarteAinda não há avaliações
- Respostas - Potencia IDocumento6 páginasRespostas - Potencia IDIEGO DIAS DOMINGUESAinda não há avaliações
- Bancada de Testes Didática para Análise Dinâmica de Um Sistema de Transmissão Veicular Tipo CVTDocumento12 páginasBancada de Testes Didática para Análise Dinâmica de Um Sistema de Transmissão Veicular Tipo CVTFilipe CunhaAinda não há avaliações
- RelatórioDocumento6 páginasRelatórioGhavelarAinda não há avaliações
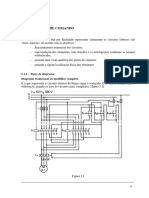
- 10 3diagramasdecomandoDocumento29 páginas10 3diagramasdecomandoNilso Cristóvão livele LiveleAinda não há avaliações
- Rela To Rio Final EspDocumento31 páginasRela To Rio Final EspLuise CardozoAinda não há avaliações
- Filtro Rejeita Faixa - Ra+¡ e BrunoDocumento14 páginasFiltro Rejeita Faixa - Ra+¡ e BrunofedirasagaAinda não há avaliações
- Conversores DuaisDocumento12 páginasConversores DuaisJohnantan SantosAinda não há avaliações
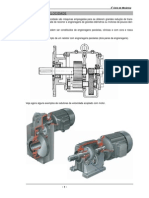
- Projetos Mecanicos PDFDocumento58 páginasProjetos Mecanicos PDFPauloAinda não há avaliações
- Relatorio 2 - Lab C2 - UFMG 2014/1Documento9 páginasRelatorio 2 - Lab C2 - UFMG 2014/1João VictorAinda não há avaliações
- Cap 2 - Dissertacao de Mestrado - Dante ShimodaDocumento30 páginasCap 2 - Dissertacao de Mestrado - Dante ShimodaDante ShimodaAinda não há avaliações
- Determinação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoDocumento7 páginasDeterminação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoCesar MaiaAinda não há avaliações
- Trabalho - ControleDocumento3 páginasTrabalho - ControleDouglas MagnusAinda não há avaliações
- Relatório 1Documento8 páginasRelatório 1Matheus RodriguesAinda não há avaliações
- Diagramas de Comando - Parte 01Documento16 páginasDiagramas de Comando - Parte 01ArturJaekelAinda não há avaliações
- Sistemas de Controle II - CompensadoresDocumento128 páginasSistemas de Controle II - CompensadoresGiovanna MisquitaAinda não há avaliações
- Lista 3 - Redutores e Rodas de AtritoDocumento3 páginasLista 3 - Redutores e Rodas de AtritoLeewangAinda não há avaliações
- SC 04Documento6 páginasSC 04GersonMinoruAinda não há avaliações
- Cálculo de Curto Circuito TrifásicoDocumento19 páginasCálculo de Curto Circuito TrifásicoMarcelo MagriAinda não há avaliações
- Unid 5.2 Circuitos Trifasicos DesequilibradosDocumento21 páginasUnid 5.2 Circuitos Trifasicos Desequilibradosandressapee100% (2)
- Motor Assíncrono TrifásicoDocumento9 páginasMotor Assíncrono TrifásicoDaniel SantosAinda não há avaliações
- ZetaDocumento8 páginasZetaDiego CarvalhoAinda não há avaliações
- Apresentacao Do Calculo Mecanico - NEWDocumento56 páginasApresentacao Do Calculo Mecanico - NEWlausjuniorAinda não há avaliações
- Lista de Exercícios 1Documento8 páginasLista de Exercícios 1RafaelAinda não há avaliações
- GraduadoresDocumento22 páginasGraduadoresggmadrugaAinda não há avaliações
- Dimensionamento de Partida Direta de Motor TrifasicoDocumento20 páginasDimensionamento de Partida Direta de Motor TrifasicoJosinaldo Justino100% (1)
- Unifap Lista de ExercIcios Cap 1 3Documento11 páginasUnifap Lista de ExercIcios Cap 1 3Anonymous woo8N5IAinda não há avaliações
- Lab 00Documento31 páginasLab 00Luiz Fernando Florentino TrevisanAinda não há avaliações
- Lista 1Documento7 páginasLista 1Tiago Rodrigues MendonçaAinda não há avaliações
- Relatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Documento22 páginasRelatório - Exp3 - Projeto de Controladores Discreto para o Controle de Posição de Um Motor DC - Controle Discreto - Quad5.1Fernando Henrique G. Zucatelli100% (1)
- Mapa - Acionamentos Elétricos - 51-2024Documento4 páginasMapa - Acionamentos Elétricos - 51-2024admcavaliniassessoriaAinda não há avaliações
- Curto CircuitoDocumento61 páginasCurto Circuitoacsbaltazar4474Ainda não há avaliações
- Forno Com Controle RealimentadoDocumento12 páginasForno Com Controle RealimentadoMaicon SponchiadoAinda não há avaliações
- Trabalho 2 - Eletrotecnica Mec - V4 Maio 2023Documento3 páginasTrabalho 2 - Eletrotecnica Mec - V4 Maio 2023Ronald José Silva CostaAinda não há avaliações
- Controle - Exercicios C Gabarito-1Documento6 páginasControle - Exercicios C Gabarito-1Pulqueres Araújo de LemosAinda não há avaliações
- Exercicios Prova 1Documento32 páginasExercicios Prova 1vadinhoteixeiraAinda não há avaliações
- Aula 5Documento11 páginasAula 5Adler MachadoAinda não há avaliações
- Aula Prática 2 - Simulação PDFDocumento3 páginasAula Prática 2 - Simulação PDFRichard De Medeiros CastroAinda não há avaliações
- ControleVelocidadeMotorCC 2007Documento47 páginasControleVelocidadeMotorCC 2007AlyssonAlmeidaAinda não há avaliações
- SEP 1 - Cap 5. 2 Componentes SimetricasDocumento26 páginasSEP 1 - Cap 5. 2 Componentes SimetricasFelipe NunesAinda não há avaliações
- Aula 14 Aula Pratica 02 ESTA008 17 v1Documento8 páginasAula 14 Aula Pratica 02 ESTA008 17 v1caAinda não há avaliações
- 3 Lista de Exercícios - GTDC - Sistemas em PuDocumento5 páginas3 Lista de Exercícios - GTDC - Sistemas em PuEngenharia ElétricaAinda não há avaliações
- Tx8H Desligamento Eletrônico Por Sobrecarga: Traubomatic Ind. E Com. LtdaDocumento8 páginasTx8H Desligamento Eletrônico Por Sobrecarga: Traubomatic Ind. E Com. LtdamarcosAinda não há avaliações
- Atividade Laboratório Máquinas Elétricas IIDocumento10 páginasAtividade Laboratório Máquinas Elétricas IIJeferson Carvalho ValverdeAinda não há avaliações
- Ex Controladores Discretos - 1Documento17 páginasEx Controladores Discretos - 1vanessacavalcantiiAinda não há avaliações
- Ensaio Motor InduçãoDocumento4 páginasEnsaio Motor InduçãoBruno MelloAinda não há avaliações
- Relatório Do Experimento1Documento10 páginasRelatório Do Experimento1Ryan EdwardsAinda não há avaliações
- Prova2 2010-2 Resolvida PDFDocumento16 páginasProva2 2010-2 Resolvida PDFRicardo VenturaAinda não há avaliações
- Corripio - Capitulo 6Documento30 páginasCorripio - Capitulo 6tai_ssAinda não há avaliações
- Manual de Torno V 02-07-010Documento63 páginasManual de Torno V 02-07-010moarababyAinda não há avaliações
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Controle Vetorial, Máquina De Indução E Métodos NuméricosNo EverandControle Vetorial, Máquina De Indução E Métodos NuméricosAinda não há avaliações
- Implementando Um Inversor De Frequência No Stm32f103c8 Programado No ArduinoNo EverandImplementando Um Inversor De Frequência No Stm32f103c8 Programado No ArduinoAinda não há avaliações
- AllegroDocumento7 páginasAllegroLeonardo LimaAinda não há avaliações
- Norma 14039 AterramentoDocumento28 páginasNorma 14039 Aterramentods_engenharia8817Ainda não há avaliações
- Seminário Siemens DPSDocumento40 páginasSeminário Siemens DPSVagner Pichinatti100% (3)
- Apostila - Aterramento ElétricoDocumento43 páginasApostila - Aterramento ElétricoItalo RicardoAinda não há avaliações
- Esquemas AterramentoDocumento15 páginasEsquemas AterramentorobertoAinda não há avaliações
- Apostila Gás PDFDocumento5 páginasApostila Gás PDFLeonardo LimaAinda não há avaliações
- Métodos de Produção de Semicondutores PDFDocumento32 páginasMétodos de Produção de Semicondutores PDFLeonardo LimaAinda não há avaliações
- Esquemas AterramentoDocumento15 páginasEsquemas AterramentorobertoAinda não há avaliações
- FISPQ Hidrogenio PDFDocumento3 páginasFISPQ Hidrogenio PDFLeonardo LimaAinda não há avaliações
- Hidrogenio AgaDocumento8 páginasHidrogenio AgaLeonardo LimaAinda não há avaliações
- Norma Cnen - Ne 301Documento22 páginasNorma Cnen - Ne 301kiko69Ainda não há avaliações
- Análise de INVESTIMENTODocumento14 páginasAnálise de INVESTIMENTOLeonardo LimaAinda não há avaliações
- Guia - Audit - GA03 - ABNT NBR 15358Documento4 páginasGuia - Audit - GA03 - ABNT NBR 15358Leonardo LimaAinda não há avaliações
- Col 0109Documento14 páginasCol 0109Elder SobrinhoAinda não há avaliações
- Ver A SUMULA 361 TST - Súmulas Do TST PDFDocumento33 páginasVer A SUMULA 361 TST - Súmulas Do TST PDFLeonardo LimaAinda não há avaliações
- 2014.05 - Fatores Atualizacao Monetaria 05.2014Documento2 páginas2014.05 - Fatores Atualizacao Monetaria 05.2014Leonardo LimaAinda não há avaliações
- Comunicação USB Com o PICDocumento3 páginasComunicação USB Com o PICLeonardo LimaAinda não há avaliações
- Comunicação USB Com o PICDocumento3 páginasComunicação USB Com o PICLeonardo LimaAinda não há avaliações
- Comunicação USB Com o PICDocumento3 páginasComunicação USB Com o PICLeonardo LimaAinda não há avaliações
- NR10 EadDocumento2 páginasNR10 EadLeonardo Lima100% (1)
- Detectores de Radiação IonizanteDocumento9 páginasDetectores de Radiação IonizantekalpicoAinda não há avaliações
- PIC18 F 4550Documento28 páginasPIC18 F 4550Lúcio Di LoretoAinda não há avaliações
- Acordao 343 2011 670Documento23 páginasAcordao 343 2011 670wernerkaiAinda não há avaliações
- Pesquisa Espectro EletromagneticoDocumento30 páginasPesquisa Espectro EletromagneticoalcantaraadAinda não há avaliações
- Artigo Dosimetria Tuffi Beatriz PDFDocumento7 páginasArtigo Dosimetria Tuffi Beatriz PDFTarcisio LopesAinda não há avaliações
- Manual de Orientação Sobre Controle Médico Sobre Controle Médico Ocupacional Da Exposição Ocupacional Da Exposição A Substâncias Químicas A Substâncias QuímicaDocumento84 páginasManual de Orientação Sobre Controle Médico Sobre Controle Médico Ocupacional Da Exposição Ocupacional Da Exposição A Substâncias Químicas A Substâncias QuímicaHudson LegnarAinda não há avaliações
- Curso Promeiros Socorros CRUZ VERMELHADocumento1 páginaCurso Promeiros Socorros CRUZ VERMELHALeonardo LimaAinda não há avaliações
- PPR FundacentroDocumento130 páginasPPR FundacentrotrixbsAinda não há avaliações
- Região Centro OesteDocumento3 páginasRegião Centro OesteValdecyr SantosAinda não há avaliações
- Aviso - Abertura - Processo - Selecao - Regentes 2Documento6 páginasAviso - Abertura - Processo - Selecao - Regentes 2Lili CordeiroAinda não há avaliações
- A Responsabilidade Penal Por Omissao ImpDocumento109 páginasA Responsabilidade Penal Por Omissao ImpValéria RodriguesAinda não há avaliações
- Fatura: Vencimento 20/01/2019 Valor Forma de Pagamento BoletoDocumento1 páginaFatura: Vencimento 20/01/2019 Valor Forma de Pagamento BoletoGleison da SilvaAinda não há avaliações
- Embreagens e Volantes 10Documento20 páginasEmbreagens e Volantes 10Daniel Willemam TrindadeAinda não há avaliações
- AULA 3 - Redação - Como Organizar Meu Pensamento - Profa. PambaDocumento8 páginasAULA 3 - Redação - Como Organizar Meu Pensamento - Profa. PambaPaulinha GazarianAinda não há avaliações
- Gerald Holton. As Raízes Da Complementaridade PDFDocumento23 páginasGerald Holton. As Raízes Da Complementaridade PDFUmaitan JuniorAinda não há avaliações
- Uma Conversa Sobre A BíbliaDocumento17 páginasUma Conversa Sobre A BíbliaGustavo MoreiraAinda não há avaliações
- ASPIRANTES Resumo SimplificadoDocumento4 páginasASPIRANTES Resumo SimplificadoKelvyn100% (2)
- 2 Lista Revisional - Conceitos BsicosDocumento2 páginas2 Lista Revisional - Conceitos BsicosPedro HenriqueAinda não há avaliações
- As2 Unidade 4 Historia Da ArteDocumento2 páginasAs2 Unidade 4 Historia Da ArteArquiteto e Eng. TSST Bombeiro civil Rafael Santos100% (1)
- EXERC - 1-PROVA BRASIL DESCR 3 (5º Ano - L.P)Documento3 páginasEXERC - 1-PROVA BRASIL DESCR 3 (5º Ano - L.P)Eduardo SilvaAinda não há avaliações
- Tales of Demons and Gods Capitulo 428Documento5 páginasTales of Demons and Gods Capitulo 428edimarribeirodacunhaAinda não há avaliações
- Plim! Revisão de Conteúdos de Matemática 4º Ano - 1º TrimestreDocumento12 páginasPlim! Revisão de Conteúdos de Matemática 4º Ano - 1º TrimestreCristina BarbosaAinda não há avaliações
- TCC AutismoDocumento21 páginasTCC AutismoMarcia SouzaAinda não há avaliações
- Livro Didático É MuletaDocumento3 páginasLivro Didático É MuletaantonioAinda não há avaliações
- Caderno de Generos QuarentenaDocumento18 páginasCaderno de Generos QuarentenaMarcio SuamAinda não há avaliações
- Testes (Formato Editável)Documento34 páginasTestes (Formato Editável)Catarina FerreiraAinda não há avaliações
- Tqe 01Documento13 páginasTqe 01kronos onomoAinda não há avaliações
- Abrindo Caixa de PandoraDocumento2 páginasAbrindo Caixa de PandoraTayrine SantosAinda não há avaliações
- Avaliação de Geografia 6º AnoDocumento3 páginasAvaliação de Geografia 6º AnoGal AnjosAinda não há avaliações
- Texto Seminario - Maria V Benevides Educação em DH de Que Se TrataDocumento11 páginasTexto Seminario - Maria V Benevides Educação em DH de Que Se TrataGustavo FujiAinda não há avaliações
- Regras MatriculaDocumento9 páginasRegras Matriculapaulo bessaAinda não há avaliações
- Treinamento de Força PDFDocumento59 páginasTreinamento de Força PDFCarlos ThiagoAinda não há avaliações
- Treinamento EnemDocumento3 páginasTreinamento EnemJóVidal100% (1)
- Prof. Tacia - Lição 10 REVISÃO AV1 - Logística 22 A 26.5Documento53 páginasProf. Tacia - Lição 10 REVISÃO AV1 - Logística 22 A 26.5Fernanda VitaliAinda não há avaliações
- Sistema de Classificação Dos VegetaisDocumento34 páginasSistema de Classificação Dos VegetaisLayla Lino100% (1)
- A Epistemologia Do Professor - BECKERDocumento172 páginasA Epistemologia Do Professor - BECKERCarolOenning100% (1)
- Aula 08 - Processo Civil IIIDocumento21 páginasAula 08 - Processo Civil IIIJennifer NunesAinda não há avaliações
- 06 - Descobrindo o Amor Com Os Olhos Da Alma - MioloDocumento48 páginas06 - Descobrindo o Amor Com Os Olhos Da Alma - MioloMarília Liloca100% (2)