Você também pode gostar
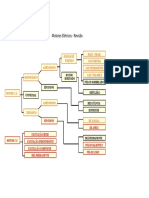
- Revisão Motores ElétricosDocumento31 páginasRevisão Motores ElétricosJULIANO100% (1)
- Aula (1) IntroduçãoDocumento52 páginasAula (1) IntroduçãoMatias HubertAinda não há avaliações
- (Microsoft Word - Apostila Inversor - Abril - 09Documento95 páginas(Microsoft Word - Apostila Inversor - Abril - 09Beto RibeiroAinda não há avaliações
- Aumento de Produtividade e Economia de Energia Com Inversores de Frequencia e Soft StartersDocumento36 páginasAumento de Produtividade e Economia de Energia Com Inversores de Frequencia e Soft StarterslucianocostaAinda não há avaliações
- Apresentação EEMEDocumento16 páginasApresentação EEMEDanielAinda não há avaliações
- Motores de Imas Permanentes TCCDocumento7 páginasMotores de Imas Permanentes TCCSilas Santos CostaAinda não há avaliações
- Maquinas Elétricos CC 01 Favinci 2019Documento29 páginasMaquinas Elétricos CC 01 Favinci 2019Christian PaulAinda não há avaliações
- Motores de CADocumento11 páginasMotores de CALuther BuqueAinda não há avaliações
- Ebook Motores Eletricos v2Documento65 páginasEbook Motores Eletricos v2Daniel Oliveira100% (1)
- Metodo de Partida de Motores de Induçao 05-04-22Documento94 páginasMetodo de Partida de Motores de Induçao 05-04-22Edmilson FernandesAinda não há avaliações
- Máquinas e Comandos ElétricosDocumento141 páginasMáquinas e Comandos ElétricosBruno AlmeidaAinda não há avaliações
- PCC Eng Mecatrônica-Acionamento de Máquinas I-MECI.002Documento3 páginasPCC Eng Mecatrônica-Acionamento de Máquinas I-MECI.002DrutskoBalaAinda não há avaliações
- Manual SMC-U-ADV V3.30 REV 4.0Documento15 páginasManual SMC-U-ADV V3.30 REV 4.0pazolaAinda não há avaliações
- Servo Motores Rui PiresDocumento7 páginasServo Motores Rui PiresRui PiresAinda não há avaliações
- Motores de Imãs PermanentesDocumento6 páginasMotores de Imãs PermanentesDione SilvaAinda não há avaliações
- APOSTILA - Acionamentos Elétricos - Cap. 1 - Conceitos FundamentaisDocumento42 páginasAPOSTILA - Acionamentos Elétricos - Cap. 1 - Conceitos FundamentaispcalmeidaAinda não há avaliações
- Apresentação Máquinas RotativasDocumento26 páginasApresentação Máquinas RotativasSandro SilvaAinda não há avaliações
- Atuadores PDFDocumento16 páginasAtuadores PDFjeffAinda não há avaliações
- Controle Automático 2Documento31 páginasControle Automático 2Antonio FloriPaca Da Foxx100% (1)
- Aula Motores CCDocumento36 páginasAula Motores CCClaudinha CristinaAinda não há avaliações
- Automacao Industrial Maquinas e Comandos EletricosDocumento141 páginasAutomacao Industrial Maquinas e Comandos EletricosDante La PortaAinda não há avaliações
- Produtos WEG 03-2018Documento67 páginasProdutos WEG 03-2018Matheus AndreoAinda não há avaliações
- Introdução A Motores ElétricosDocumento13 páginasIntrodução A Motores ElétricosAbner SilvaAinda não há avaliações
- Vantagens Do Uso de Motor CADocumento2 páginasVantagens Do Uso de Motor CAwkelw842Ainda não há avaliações
- Parcial Maq. e Com. EletricosDocumento7 páginasParcial Maq. e Com. EletricosrrxsavioAinda não há avaliações
- Motor UniversalDocumento24 páginasMotor UniversalGabriel AnteroAinda não há avaliações
- Aula9 Motores Eletricos SelecaoDocumento69 páginasAula9 Motores Eletricos SelecaoZickson ManjateAinda não há avaliações
- Artigo Inversor de FrequênciaDocumento11 páginasArtigo Inversor de FrequênciaFelipe della ViaAinda não há avaliações
- Motores de Corrente AlternadaDocumento6 páginasMotores de Corrente AlternadaRobson DorivalAinda não há avaliações
- QEE1 - AULAS 6 e 7 - 14-03-2014Documento23 páginasQEE1 - AULAS 6 e 7 - 14-03-2014Marcos C I SAinda não há avaliações
- Aula 12 - Caracteristicas Gerais Dos MotoresDocumento38 páginasAula 12 - Caracteristicas Gerais Dos MotoresElione RodriguesAinda não há avaliações
- Slides ComandosDocumento198 páginasSlides ComandosBruno VasconcelosAinda não há avaliações
- ApresentaçãoDocumento49 páginasApresentaçãoericodozAinda não há avaliações
- Motores de Imãs PermanentesDocumento6 páginasMotores de Imãs Permanentesccprado1Ainda não há avaliações
- Encontro 3Documento90 páginasEncontro 3Yandi Gallego LanderaAinda não há avaliações
- ServomotorDocumento3 páginasServomotorAlexandre PachecoAinda não há avaliações
- Elementos de Maquina Aula 01Documento40 páginasElementos de Maquina Aula 01Jacyeude Passos AraújoAinda não há avaliações
- Aula - 07 - Eletrotecnica IndustrialDocumento45 páginasAula - 07 - Eletrotecnica IndustrialJair SousaAinda não há avaliações
- Vantagens Do Uso de Motor CaDocumento1 páginaVantagens Do Uso de Motor CaKlebersonRamosAinda não há avaliações
- Plano de Aula - Acionamento e Controle de MotoresDocumento18 páginasPlano de Aula - Acionamento e Controle de MotoresDenilson Wagner ZaidanAinda não há avaliações
- Tópico 3 - Saídas - Atuadores 2020Documento80 páginasTópico 3 - Saídas - Atuadores 2020Lucas Cirino PAinda não há avaliações
- Inversores de FrequênciaDocumento57 páginasInversores de FrequênciaMarcos Vinicius100% (2)
- Motores 1Documento64 páginasMotores 1edubahiAinda não há avaliações
- 5Documento20 páginas5Thuanny BarbosaAinda não há avaliações
- Motores CC e CADocumento17 páginasMotores CC e CALucilene AparecidaAinda não há avaliações
- 5 - INSTALAÇÕES ELÉTRICAS INDUSTRIAIS - Motores ElétricosDocumento44 páginas5 - INSTALAÇÕES ELÉTRICAS INDUSTRIAIS - Motores ElétricosIvanaldo SilvaAinda não há avaliações
- Motores ElétricosDocumento48 páginasMotores ElétricosDenny rochaAinda não há avaliações
- Slide 11 Máquinas de Corrente Contínua 2021-2Documento25 páginasSlide 11 Máquinas de Corrente Contínua 2021-2Felipe Fiorotti da Rocha100% (1)
- Aula 09 - Instal Elétricas Aplicações e Projeto Energia Elétrica - Motores ElétricosDocumento75 páginasAula 09 - Instal Elétricas Aplicações e Projeto Energia Elétrica - Motores ElétricosAllan VictorAinda não há avaliações
- Servo MotorDocumento12 páginasServo MotorLOlzitoAinda não há avaliações
- Máquina PartidasDocumento4 páginasMáquina PartidasCicero MelloAinda não há avaliações
- Motores de Corrente ContinuaDocumento5 páginasMotores de Corrente ContinuaGabriel Moura FagundesAinda não há avaliações
- Aula 03 - Máquinas Assíncronas de Indução TrifásicasDocumento51 páginasAula 03 - Máquinas Assíncronas de Indução TrifásicasanjgarAinda não há avaliações
- Prova 2 - Joo v. D. PereiraDocumento9 páginasProva 2 - Joo v. D. PereiraohlakhAinda não há avaliações
- WEG Guia Pratico de Treinamento Tecnico Comercial 50009256 Brochure Portuguese WebDocumento16 páginasWEG Guia Pratico de Treinamento Tecnico Comercial 50009256 Brochure Portuguese WebCarlos GrilloAinda não há avaliações
- Introdução As Maquinas EléctricasDocumento21 páginasIntrodução As Maquinas EléctricasLeo WilliamAinda não há avaliações
- Simbolos e Acionamentos ElétricosDocumento21 páginasSimbolos e Acionamentos ElétricosDionatan RangelAinda não há avaliações
- Optimized Receptor To Multi-Channel Wearable Sensors NetworkDocumento3 páginasOptimized Receptor To Multi-Channel Wearable Sensors NetworkCarlos Alexandre FerriAinda não há avaliações
- Aula - 2 Motores de Corrente Contínua Com EscovasDocumento13 páginasAula - 2 Motores de Corrente Contínua Com EscovasCarlos Alexandre FerriAinda não há avaliações
- AtividadeDocumento1 páginaAtividadeCarlos Alexandre FerriAinda não há avaliações
- O Procedimento de Ponto de GamaDocumento1 páginaO Procedimento de Ponto de GamaCarlos Alexandre FerriAinda não há avaliações
- Gabarito L1Documento5 páginasGabarito L1Andre Luiz CostaAinda não há avaliações
- CalDef Est - Iso PeloPTV 1aaula 4.2.21Documento27 páginasCalDef Est - Iso PeloPTV 1aaula 4.2.21Tese ramonAinda não há avaliações
- Trabalho Potencia EnergiaDocumento10 páginasTrabalho Potencia EnergiaAlice da SilvaAinda não há avaliações
- Física Ensino Médio - HidrostaticaDocumento11 páginasFísica Ensino Médio - HidrostaticaRafael TavaresAinda não há avaliações
- 01 Everton 1 ANOF3 Aula 05 Aceleracao MediaDocumento2 páginas01 Everton 1 ANOF3 Aula 05 Aceleracao MediaBárbara Marchiori Biel100% (1)
- Pendulo Fisico Com CONCLUSÂODocumento13 páginasPendulo Fisico Com CONCLUSÂOTaline GóesAinda não há avaliações
- Conteúdo Programático - Concurso PetrobrasDocumento4 páginasConteúdo Programático - Concurso PetrobrasuleauAinda não há avaliações
- Lista 3 MHS e Ondas - 2020Documento6 páginasLista 3 MHS e Ondas - 2020Daniel SantosAinda não há avaliações
- Fenômenos Ondulatórios: InterferênciasDocumento20 páginasFenômenos Ondulatórios: InterferênciasRYAN PATRICK SIMÕES CORRÊAAinda não há avaliações
- Força Magnética - Exercícios de Fixação e TestesDocumento8 páginasForça Magnética - Exercícios de Fixação e TestesArmando Ferreira Alvferreira100% (2)
- Exercicios Cinematica NP1 - NP2Documento21 páginasExercicios Cinematica NP1 - NP2Sylvio Augusto0% (1)
- Calorimetria Dilatação Fisica PDFDocumento7 páginasCalorimetria Dilatação Fisica PDFluithaaAinda não há avaliações
- Atividade - EletrostáticaDocumento4 páginasAtividade - EletrostáticaThyago PinheiroAinda não há avaliações
- Lançamento Vertical e Queda Livre - CAP - 2016Documento4 páginasLançamento Vertical e Queda Livre - CAP - 2016Ronaldo Da Costa CunhaAinda não há avaliações
- Hidrostática: Pressões: Mecânica, Hidrostática, Atmosférica e Absoluta. EmpuxoDocumento17 páginasHidrostática: Pressões: Mecânica, Hidrostática, Atmosférica e Absoluta. EmpuxoRANDEROAinda não há avaliações
- Fisica Questões P1Documento5 páginasFisica Questões P1Vanessa BmAinda não há avaliações
- Mec FluDocumento9 páginasMec FluHenry MorenoAinda não há avaliações
- Dobras e Falhas-semana1-E@D1Documento34 páginasDobras e Falhas-semana1-E@D1Tik tok Tik tokAinda não há avaliações
- Dilatação Térmica Dos Sólidos e LíquidosDocumento23 páginasDilatação Térmica Dos Sólidos e LíquidosLeandroBritoAinda não há avaliações
- QuestoesUS-ME RespondidoDocumento34 páginasQuestoesUS-ME RespondidoHelton Jhonis88% (8)
- Arquivo ResistenciDocumento2 páginasArquivo ResistenciMateus TavaresAinda não há avaliações
- LF A06 ExercÃciosDocumento6 páginasLF A06 ExercÃciosNicolas Gabriel NinicoAinda não há avaliações
- Siemens Motores CCDocumento11 páginasSiemens Motores CCRui Mendes0% (1)
- Exercicios de Hidraulica BasicaDocumento25 páginasExercicios de Hidraulica BasicaJosé Luiz Saar HernandesAinda não há avaliações
- Provas Ita 2003 - EtapaDocumento1 páginaProvas Ita 2003 - EtapaRoberto NeivaAinda não há avaliações
- Lista Exercícios Fenômenos de Transporte - IFSCDocumento19 páginasLista Exercícios Fenômenos de Transporte - IFSCMarcelo GauAinda não há avaliações
- VIBRAÇÕES MECÂNICAS - Parte 3Documento16 páginasVIBRAÇÕES MECÂNICAS - Parte 3Fernanda SilveiraAinda não há avaliações
- Cap 8 - Introdução A Escoamento Viscoso, Incompressivel e InternoDocumento41 páginasCap 8 - Introdução A Escoamento Viscoso, Incompressivel e InternoThiago LauarAinda não há avaliações
- Lista de Exercícios - Forças de AtritoDocumento3 páginasLista de Exercícios - Forças de AtritoljowannaAinda não há avaliações
- CamesDocumento23 páginasCamesCaio ValérioAinda não há avaliações