Você também pode gostar
- Aula Resposta A Uma Excitação PeriódicaDocumento6 páginasAula Resposta A Uma Excitação PeriódicaAlmir BeneditoAinda não há avaliações
- Relatorio - Sistemas MecânicosDocumento9 páginasRelatorio - Sistemas MecânicosRonan AlvarengaAinda não há avaliações
- Denilson Manuel Francisco - FisicaDocumento5 páginasDenilson Manuel Francisco - FisicaDenny FranciscoAinda não há avaliações
- Ampop-Exercicios ResolvidosDocumento7 páginasAmpop-Exercicios ResolvidosMaitsudá Matos100% (1)
- Lista 2 de Física MatemáticaDocumento19 páginasLista 2 de Física MatemáticaJames GuimaraesAinda não há avaliações
- O Ensino Da Matemática Na Educação Básica Através Do Software GeogebraNo EverandO Ensino Da Matemática Na Educação Básica Através Do Software GeogebraAinda não há avaliações
- Besto Friendo 2Documento3 páginasBesto Friendo 2Mundo CuriosoAinda não há avaliações
- Formulário - Condução Fenômeno Dos TransportesDocumento2 páginasFormulário - Condução Fenômeno Dos Transportesfelipe.oliveira123334Ainda não há avaliações
- (84927-69608) Prova 1 EaD Circuitos CA 2021 ADocumento4 páginas(84927-69608) Prova 1 EaD Circuitos CA 2021 ARodrigo EduardoAinda não há avaliações
- Ndw32cd3vfqe38d6u478fead93mjc4pdf 230502 143404Documento2 páginasNdw32cd3vfqe38d6u478fead93mjc4pdf 230502 143404William GusmãoAinda não há avaliações
- Seminário FourierDocumento21 páginasSeminário FourierVanderson Beltrão de CarvalhoAinda não há avaliações
- Cópia de Teste1.2-Fis (2021-2022)Documento3 páginasCópia de Teste1.2-Fis (2021-2022)Royale BomberAinda não há avaliações
- Alan Lucas - MétAproxDocumento30 páginasAlan Lucas - MétAproxkhc2v7vhpyAinda não há avaliações
- Rova deDocumento2 páginasRova deThamires CoutinhoAinda não há avaliações
- Ap1 2022-1Documento6 páginasAp1 2022-1Victor PereiraAinda não há avaliações
- Trig 2022Documento9 páginasTrig 2022Daniel Figueira ReisAinda não há avaliações
- Formulário TermodinâmicaDocumento2 páginasFormulário TermodinâmicaKalopsia SwevenAinda não há avaliações
- SLITDocumento20 páginasSLITVivyane MarquesAinda não há avaliações
- Módulo 6 - Transformada de Laplace Direta e InversaDocumento35 páginasMódulo 6 - Transformada de Laplace Direta e Inversasolteirailudida2Ainda não há avaliações
- Lista 1 - Felipe Afonso Soares GuimarãesDocumento15 páginasLista 1 - Felipe Afonso Soares GuimarãesFelipe Afonso Soares GuimarãesAinda não há avaliações
- PPTfourier, 3ra ParteDocumento10 páginasPPTfourier, 3ra ParteRocio Angie Navarro SeguraAinda não há avaliações
- Publique Uma Atualização de StatusDocumento30 páginasPublique Uma Atualização de Statuskhc2v7vhpyAinda não há avaliações
- CON Teoria 05 2012 2Documento21 páginasCON Teoria 05 2012 2Richard de Medeiros CastroAinda não há avaliações
- Lista 1 MecânicaDocumento10 páginasLista 1 MecânicaMatheus MagalhãesAinda não há avaliações
- 1 Lista ED - Semestre 2022.1Documento9 páginas1 Lista ED - Semestre 2022.1Nicolas PessoaAinda não há avaliações
- Aula2 CinemáticaDocumento7 páginasAula2 CinemáticaSofia RodriguesAinda não há avaliações
- Aula Resposta A Uma Excitação Impulsiva - Casos EspeciaisDocumento13 páginasAula Resposta A Uma Excitação Impulsiva - Casos EspeciaisAlmir BeneditoAinda não há avaliações
- Formulas Física I (Corregido)Documento1 páginaFormulas Física I (Corregido)ValerieAinda não há avaliações
- Trabalho de VibraçõesDocumento8 páginasTrabalho de VibraçõesLeonardo LuizAinda não há avaliações
- Integral de Funções VetoriaisDocumento3 páginasIntegral de Funções VetoriaisHerik sandro de souza martinsAinda não há avaliações
- Formulas ResMatDocumento1 páginaFormulas ResMatLeonardo Kyo KabayamaAinda não há avaliações
- Transform A Das FourierDocumento2 páginasTransform A Das Fourierluiz.santosAinda não há avaliações
- 09 - Srie e Transformada de Fourier Tempo ContnuoDocumento24 páginas09 - Srie e Transformada de Fourier Tempo ContnuoLucas ViníciusAinda não há avaliações
- Trabalho TC FinalDocumento6 páginasTrabalho TC FinalFilipe Diamantino SabelaAinda não há avaliações
- Modelagem de Sistemas Meca NicosDocumento23 páginasModelagem de Sistemas Meca NicosDavid de Almeida FiorilloAinda não há avaliações
- Universidade Eduardo Mondlane Faculdade de Engenharia Departamento de Engenharia Química Curso de Engenharia QuímicaDocumento7 páginasUniversidade Eduardo Mondlane Faculdade de Engenharia Departamento de Engenharia Química Curso de Engenharia QuímicaFilipe Diamantino SabelaAinda não há avaliações
- Solução 8.4 SusskindDocumento6 páginasSolução 8.4 SusskindRenan OliveiraAinda não há avaliações
- Solução Sussekiind Questão 8.1Documento6 páginasSolução Sussekiind Questão 8.1Renan OliveiraAinda não há avaliações
- Solucionário Do Livro de Teoria Das Estruturas IDocumento22 páginasSolucionário Do Livro de Teoria Das Estruturas IRenan OliveiraAinda não há avaliações
- Formulas Física IDocumento1 páginaFormulas Física IKRYSSIA PAOLA RECINOS JUAREZAinda não há avaliações
- Anotações Conformação Mecânica - Lei Da Constância de VolumeDocumento7 páginasAnotações Conformação Mecânica - Lei Da Constância de VolumeMiii Bergalli100% (1)
- Sinais, Energia e PotenciaDocumento4 páginasSinais, Energia e PotenciaGeorgino Silva0% (1)
- Potência em Regime Senoidal PermanenteDocumento39 páginasPotência em Regime Senoidal PermanentePedro HenriqueAinda não há avaliações
- ACQA - CircuitosEletricosIII - 1 AVALIAÇÃO CONTINUADADocumento2 páginasACQA - CircuitosEletricosIII - 1 AVALIAÇÃO CONTINUADALuma W. OliveiraAinda não há avaliações
- Formulário SSM - FINALDocumento6 páginasFormulário SSM - FINALbatataAinda não há avaliações
- Tabela de DerivadasDocumento1 páginaTabela de DerivadasLuccasViegasAinda não há avaliações
- Modelagem de Sistemas Ele TricosDocumento19 páginasModelagem de Sistemas Ele TricosDavid de Almeida FiorilloAinda não há avaliações
- Formulario Controlo de SistemasDocumento6 páginasFormulario Controlo de SistemasKalopsia SwevenAinda não há avaliações
- Quiz Eletromag 2023 - 2 ResolvidoDocumento7 páginasQuiz Eletromag 2023 - 2 ResolvidoiomoreiramedAinda não há avaliações
- Formulario 11 AnoDocumento1 páginaFormulario 11 AnoMarta Cortez de LobãoAinda não há avaliações
- Aula 4 - Exercícios - Mecânica Dos FluidosDocumento4 páginasAula 4 - Exercícios - Mecânica Dos FluidosIsolda Xavier DantasAinda não há avaliações
- Controle e Instrumentação - Modelagem de Sistemas DinÂmicosDocumento32 páginasControle e Instrumentação - Modelagem de Sistemas DinÂmicosrenatoAinda não há avaliações
- Teste3 - 12 - Enunciado PDFDocumento8 páginasTeste3 - 12 - Enunciado PDFMartim LemeAinda não há avaliações
- Definição de Ponte de Wheatstone Com Resistência de ProteçãoDocumento4 páginasDefinição de Ponte de Wheatstone Com Resistência de ProteçãoMarco AraujoAinda não há avaliações
- Dedução Transferência de Calor e Resistência Térmica para Cilindro e EsferaDocumento2 páginasDedução Transferência de Calor e Resistência Térmica para Cilindro e EsferaVicenteFerrazAinda não há avaliações
- Acorda Raimundo ResumoDocumento3 páginasAcorda Raimundo ResumoJoão Marcos Lima MartinsAinda não há avaliações
- Amortecimento - 1Documento31 páginasAmortecimento - 1João Marcos Lima MartinsAinda não há avaliações
- Livre 2GDL - Ex2Documento15 páginasLivre 2GDL - Ex2João Marcos Lima MartinsAinda não há avaliações
- Livre 2GDLDocumento32 páginasLivre 2GDLJoão Marcos Lima MartinsAinda não há avaliações
- Calculo de Sapatas - Isolada - Divisa - Associada - Lista de AçoDocumento1.033 páginasCalculo de Sapatas - Isolada - Divisa - Associada - Lista de AçoKARINA MIRANZI NOGEUIRAAinda não há avaliações
- Catalogo Normas Tecnicas PetrobrasDocumento20 páginasCatalogo Normas Tecnicas PetrobrasRoberto AlessandroAinda não há avaliações
- P&id 1Documento1 páginaP&id 1Olycord VAinda não há avaliações
- Relatório de Fisico-Química Experimental I - Determinação Da Capacidade Calorífica de Um SólidoDocumento3 páginasRelatório de Fisico-Química Experimental I - Determinação Da Capacidade Calorífica de Um SólidoThiago LopesAinda não há avaliações
- N 2668Documento256 páginasN 2668Ricardo CurioniAinda não há avaliações
- Hercules 6 0 PT BRDocumento8 páginasHercules 6 0 PT BRLucas ferreira da silvaAinda não há avaliações
- G710-VHP 832 1002-0208 PDFDocumento4 páginasG710-VHP 832 1002-0208 PDFChagas OliveiraAinda não há avaliações
- Capitulo 6 IncroperaDocumento60 páginasCapitulo 6 IncroperaRenanAinda não há avaliações
- Rexroth - A10vso Série 31Documento40 páginasRexroth - A10vso Série 31Níkolas Borges100% (1)
- Colisoes Gps Prof Questao BKPDocumento15 páginasColisoes Gps Prof Questao BKPRicardoAmaralAinda não há avaliações
- Frenagem RegenerativaDocumento23 páginasFrenagem RegenerativaFilipe Sousa BarbosaAinda não há avaliações
- Aula Do Capítulo 7 - Livro ESTÁTICADocumento53 páginasAula Do Capítulo 7 - Livro ESTÁTICAALEXANDRE67% (3)
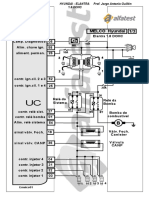
- Hyundai - Elantra 1.6 Dohc - JsalemanDocumento3 páginasHyundai - Elantra 1.6 Dohc - JsalemanLeonardo Molina100% (1)
- Relatório - Desmontagem de Um Mci - Anderson Roseo PereiraDocumento14 páginasRelatório - Desmontagem de Um Mci - Anderson Roseo PereiraAnderson RoseoAinda não há avaliações
- Accoes Sismicas Sobre Estruturas de SuporteDocumento8 páginasAccoes Sismicas Sobre Estruturas de SuporteJuventino Federico CumbaneAinda não há avaliações
- Ava Unip - Termodinâmica Aplicada - Questionário Unidade IDocumento4 páginasAva Unip - Termodinâmica Aplicada - Questionário Unidade IEliseu ManoelAinda não há avaliações
- Catalogo Suporte TubulaçãoDocumento11 páginasCatalogo Suporte TubulaçãoEdmar Ribeiro LopesAinda não há avaliações
- 7 Valvula de ControleDocumento291 páginas7 Valvula de ControleCarlos Junior100% (2)
- Lubrificantes e Graxas Shell PDFDocumento10 páginasLubrificantes e Graxas Shell PDFChagas OliveiraAinda não há avaliações
- PMOC Revisado 26082013 PDFDocumento38 páginasPMOC Revisado 26082013 PDFFernanda AndradeAinda não há avaliações
- Manual Inglês ImprimirDocumento89 páginasManual Inglês ImprimirLee BodiniAinda não há avaliações
- 4 Lista de Exercícios Fenomenos de TransporteDocumento3 páginas4 Lista de Exercícios Fenomenos de TransporteFelipe CalixtoAinda não há avaliações
- Plano Do Curso Técnico Mecânica - IntegradoDocumento427 páginasPlano Do Curso Técnico Mecânica - IntegradoMAYARA DAYANE DA SILVA100% (1)
- Caderno Técnico FAG - 2006 Sintomas, Causas, Soluções Oficina de RolamentosDocumento24 páginasCaderno Técnico FAG - 2006 Sintomas, Causas, Soluções Oficina de RolamentosBrunoMoreiraAinda não há avaliações
- Manual Ar Cond Pac9000 24000ifm8Documento48 páginasManual Ar Cond Pac9000 24000ifm8DONA BINHA DONA BINHAAinda não há avaliações
- Sangrar o Sistema de Freio Após Trocar As Pastilhas Pode Ser Difícil em Alguns Sistemas de Freio ABSDocumento2 páginasSangrar o Sistema de Freio Após Trocar As Pastilhas Pode Ser Difícil em Alguns Sistemas de Freio ABSasabrancoAinda não há avaliações
- Aula 1 - Introdução Ao Concreto Armado Mod UniDocumento41 páginasAula 1 - Introdução Ao Concreto Armado Mod UniJoyce RosaAinda não há avaliações
- Arquitetura - AçoMadeiras - Aula 3 e 4Documento53 páginasArquitetura - AçoMadeiras - Aula 3 e 4Juciorle SoaresAinda não há avaliações
- Tabela JNGDocumento95 páginasTabela JNGCarloSilva0% (1)
- Treinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisNo EverandTreinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisNota: 4.5 de 5 estrelas4.5/5 (169)
- MANUAL INTERNACIONAL DE TRICOLOGIA AVANÇADA: Um guia completo sobre cabelo, couro cabeludo e doenças capilaresNo EverandMANUAL INTERNACIONAL DE TRICOLOGIA AVANÇADA: Um guia completo sobre cabelo, couro cabeludo e doenças capilaresNota: 4.5 de 5 estrelas4.5/5 (6)
- O Poder Energético E Curativo Das Pedras E Dos CristaisNo EverandO Poder Energético E Curativo Das Pedras E Dos CristaisAinda não há avaliações
- Uma voz sem palavras: Como o corpo libera o trauma e restaura o bem-estarNo EverandUma voz sem palavras: Como o corpo libera o trauma e restaura o bem-estarNota: 4.5 de 5 estrelas4.5/5 (9)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Mãos de Luz: Um Guia Para a Cura Através do Campo de Energia HumanoNo EverandMãos de Luz: Um Guia Para a Cura Através do Campo de Energia HumanoNota: 4 de 5 estrelas4/5 (5)
- Como Elaborar Projeto de Pesquisa, Artigo Técnico-Científico e MonografiaNo EverandComo Elaborar Projeto de Pesquisa, Artigo Técnico-Científico e MonografiaAinda não há avaliações
- Matemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalNo EverandMatemática na educação infantil: Reflexões e proposições a partir teoria histórico-culturalAinda não há avaliações