Você também pode gostar
- AP 6 - Classe Pratica de Sistemas MultivariablesDocumento7 páginasAP 6 - Classe Pratica de Sistemas MultivariablesLeo WilliamAinda não há avaliações
- AP - Sistemas Multivariaveis.Documento7 páginasAP - Sistemas Multivariaveis.Nunes Jose LeonardoAinda não há avaliações
- AP1 - Traçado Do LGRDocumento12 páginasAP1 - Traçado Do LGRmanuessaanaAinda não há avaliações
- Resolução Exercícios Cap2 PDFDocumento5 páginasResolução Exercícios Cap2 PDFMarcos GutihaAinda não há avaliações
- Representação Espaço Estados Sistemas MultivariáveisDocumento4 páginasRepresentação Espaço Estados Sistemas MultivariáveisLionildo LucyAinda não há avaliações
- Representação Espaço Estados Sistemas MultivariáveisDocumento4 páginasRepresentação Espaço Estados Sistemas MultivariáveisLeo WilliamAinda não há avaliações
- Caderno de Exercícios - Aula 4 - Controle DiscretoDocumento22 páginasCaderno de Exercícios - Aula 4 - Controle DiscretoCiro DenizAinda não há avaliações
- AP 4 - Desenho de Controladores DigitalesDocumento11 páginasAP 4 - Desenho de Controladores DigitalesLionildo LucyAinda não há avaliações
- Bravox Novoe2kDocumento2 páginasBravox Novoe2kAlisson RibeiroAinda não há avaliações
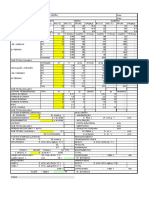
- Carga TermicaDocumento1 páginaCarga TermicaGabriel SantosAinda não há avaliações
- Sistema de controle com análise de estabilidade e lugar das raízesDocumento4 páginasSistema de controle com análise de estabilidade e lugar das raízesBruna CastroAinda não há avaliações
- LaplaceDocumento3 páginasLaplaceBenedito Nelson RovidaAinda não há avaliações
- CA 2022 - Ficha de Exercicios 2 - Parte 1Documento5 páginasCA 2022 - Ficha de Exercicios 2 - Parte 1Stelio TimaneAinda não há avaliações
- Cristalografia - Redes cristalinas, elementos de simetria e índices de MillerDocumento32 páginasCristalografia - Redes cristalinas, elementos de simetria e índices de MilleremaAinda não há avaliações
- Concreto Armado II - Exercício 2Documento2 páginasConcreto Armado II - Exercício 2Eval EngenhariaAinda não há avaliações
- PAE - TP4Documento6 páginasPAE - TP4laiomonteiro13Ainda não há avaliações
- Gabarito Da Lista 1Documento2 páginasGabarito Da Lista 1Mayara GóesAinda não há avaliações
- Circuitos Elétricos II - Transformada e Anti-transformada de LaplaceDocumento4 páginasCircuitos Elétricos II - Transformada e Anti-transformada de LaplaceMarcelo Pedro100% (1)
- Relatório 1Documento6 páginasRelatório 1André Filipe CabralAinda não há avaliações
- Relação entre corrente elétrica e força magnética em diferentes configurações experimentaisDocumento9 páginasRelação entre corrente elétrica e força magnética em diferentes configurações experimentaisCaio SimõesAinda não há avaliações
- Analise de Pilar - Imagem Do Programa Pcalc PDFDocumento18 páginasAnalise de Pilar - Imagem Do Programa Pcalc PDFRodolfo ShamáAinda não há avaliações
- 2 Exercicio AvaliativoDocumento6 páginas2 Exercicio AvaliativoGuilherme NascimentoAinda não há avaliações
- Concreto Armado II - Exercício de determinação de esforços, posição da linha neutra, área de aço e detalhamentoDocumento2 páginasConcreto Armado II - Exercício de determinação de esforços, posição da linha neutra, área de aço e detalhamentoEval EngenhariaAinda não há avaliações
- Dimensionamento e verificação de seções à flexão simplesDocumento83 páginasDimensionamento e verificação de seções à flexão simplesFabio DantasAinda não há avaliações
- Primeira Lista Cálculo IIDocumento23 páginasPrimeira Lista Cálculo IIMirelly TrigueiroAinda não há avaliações
- Desenho de controladores para sistemas de controleDocumento18 páginasDesenho de controladores para sistemas de controleRodrigues Antonio NaboAinda não há avaliações
- Experimento Bomba CentrífugaDocumento6 páginasExperimento Bomba CentrífugaGABRIEL SOUZAAinda não há avaliações
- Memorial Descritivo de Cálculo Do Duto de Aeração de Soja - Rio VerdeDocumento9 páginasMemorial Descritivo de Cálculo Do Duto de Aeração de Soja - Rio VerdeLariane MendesAinda não há avaliações
- Universidade de Aveiro Departamento de Matem Atica: T 2t 3t T 10 2 2 (T 2) 2 1Documento2 páginasUniversidade de Aveiro Departamento de Matem Atica: T 2t 3t T 10 2 2 (T 2) 2 1Rita AlmeidaAinda não há avaliações
- Lista2 ElepotDocumento12 páginasLista2 Elepotmarlondiaspacheco98Ainda não há avaliações
- Métodos matemáticos em geofísica: tabelas de transformadas de LaplaceDocumento7 páginasMétodos matemáticos em geofísica: tabelas de transformadas de LaplaceDavi Pina Barros100% (1)
- Exercicios - Transformada de Laplace PDFDocumento6 páginasExercicios - Transformada de Laplace PDFGenilson MBAinda não há avaliações
- Apostila MCAEDocumento78 páginasApostila MCAEDébora VitóriaAinda não há avaliações
- Transformações de coordenadas geográficasDocumento25 páginasTransformações de coordenadas geográficasAnthony Salas CaballeroAinda não há avaliações
- Teoria de Controle I - Projeto de Compensadores para Sistemas de Malha FechadaDocumento2 páginasTeoria de Controle I - Projeto de Compensadores para Sistemas de Malha FechadaPedro MartinsAinda não há avaliações
- Cálculo de deformações em seção de concreto armadoDocumento2 páginasCálculo de deformações em seção de concreto armadoEval EngenhariaAinda não há avaliações
- 11ºano - Ficha de Trabalho TrigonometriaDocumento3 páginas11ºano - Ficha de Trabalho TrigonometriaRaissa NeymaraAinda não há avaliações
- Relatorio 08 - SolenoideDocumento8 páginasRelatorio 08 - SolenoidePatrynie Garcia CrispimAinda não há avaliações
- R P1 CDin 217Documento6 páginasR P1 CDin 21705606908190Ainda não há avaliações
- solução exercício eqconst 08 aaaDocumento3 páginassolução exercício eqconst 08 aaaPedro PeixotoAinda não há avaliações
- Lista 1 - Exercícios LaplaceDocumento4 páginasLista 1 - Exercícios LaplacepedroAinda não há avaliações
- Sistemas de controle e transformada de LaplaceDocumento6 páginasSistemas de controle e transformada de Laplacelorentz franklinAinda não há avaliações
- Trigonometria na Circunferência: Gabarito com ResoluçõesDocumento8 páginasTrigonometria na Circunferência: Gabarito com ResoluçõesFrancine NumerAinda não há avaliações
- Exercícios Sobre Propriedades Da Potência - 100908Documento3 páginasExercícios Sobre Propriedades Da Potência - 100908ana.sousa25Ainda não há avaliações
- Ejercicio Clase - Modelos de OptimizacionDocumento3 páginasEjercicio Clase - Modelos de OptimizacionaleonlatinoAinda não há avaliações
- Elipses com centro na origem: equações e propriedadesDocumento2 páginasElipses com centro na origem: equações e propriedadesValdeir SantosAinda não há avaliações
- Elementos químicos e estrutura atômicaDocumento37 páginasElementos químicos e estrutura atômicaCarol Tomaz0% (2)
- Lista de Sistemas de Controle IIDocumento9 páginasLista de Sistemas de Controle IIfelipesineiderAinda não há avaliações
- 3 Perdas de CargasDocumento8 páginas3 Perdas de CargasGabriel ZapataAinda não há avaliações
- LGR: Técnica do Lugar Geométrico das RaízesDocumento30 páginasLGR: Técnica do Lugar Geométrico das RaízesNatalia SilvaAinda não há avaliações
- Transformada de Laplace: Propriedades, Funções de Transferência e Resposta de SistemasDocumento5 páginasTransformada de Laplace: Propriedades, Funções de Transferência e Resposta de SistemasGabriel MazzoniAinda não há avaliações
- Viga retangular com armadura de compressãoDocumento30 páginasViga retangular com armadura de compressãoCléudes Rodrigues100% (1)
- Conversão de Unidades de MedidaDocumento3 páginasConversão de Unidades de MedidaVinícius CotaAinda não há avaliações
- VIGA RETANGULAR SEM ARMADURA DE COMPRESSÃODocumento24 páginasVIGA RETANGULAR SEM ARMADURA DE COMPRESSÃOJosé Antônio CardosoAinda não há avaliações
- LogaritmoDocumento2 páginasLogaritmomarcos rodriguesAinda não há avaliações
- Procedi Caudales PDFDocumento4 páginasProcedi Caudales PDFanali bautista sanchezAinda não há avaliações
- ProblemaDocumento6 páginasProblemaIsai H AAinda não há avaliações
- Ciclo Trigonométrico - GABARITODocumento5 páginasCiclo Trigonométrico - GABARITOv1202Ainda não há avaliações
- Controle Servomecanismos LaplaceDocumento2 páginasControle Servomecanismos LaplaceDouglas SilvaAinda não há avaliações
- Controle Automático IDocumento18 páginasControle Automático ILionildo LucyAinda não há avaliações
- Sensor CircuitoDocumento1 páginaSensor CircuitoLionildo LucyAinda não há avaliações
- Variacao de Velocidade Do MotorDocumento3 páginasVariacao de Velocidade Do MotorLionildo LucyAinda não há avaliações
- Ajuste de Controladores pelo Método Ziegler-NicholsDocumento13 páginasAjuste de Controladores pelo Método Ziegler-NicholsLionildo LucyAinda não há avaliações
- Lugar geométrico das raízes em sistemas de controleDocumento24 páginasLugar geométrico das raízes em sistemas de controleLionildo LucyAinda não há avaliações
- Erro estacionário e classificação de sistemas de controleDocumento11 páginasErro estacionário e classificação de sistemas de controleLionildo LucyAinda não há avaliações
- Projeto de Controladores pelo método do Lugar Geométrico das RaízesDocumento28 páginasProjeto de Controladores pelo método do Lugar Geométrico das RaízesLionildo LucyAinda não há avaliações
- AP 4 - Desenho de Controladores DigitalesDocumento11 páginasAP 4 - Desenho de Controladores DigitalesLionildo LucyAinda não há avaliações
- Lugar geométrico das raízes em sistemas de segunda ordemDocumento24 páginasLugar geométrico das raízes em sistemas de segunda ordemLionildo LucyAinda não há avaliações
- Faults Troubleshooting p62 p81 PT PT UnlockedDocumento32 páginasFaults Troubleshooting p62 p81 PT PT UnlockedLionildo LucyAinda não há avaliações
- GP Coeme 2018 2 04Documento57 páginasGP Coeme 2018 2 04João Victor Mazetti BorgesAinda não há avaliações
- Assine o DeepL Pro para traduzir documentos maiores sobre Manutenção Centrada na Fiabilidade (RCMDocumento13 páginasAssine o DeepL Pro para traduzir documentos maiores sobre Manutenção Centrada na Fiabilidade (RCMLionildo LucyAinda não há avaliações
- Aula - 03 - Análise Da Resposta Transitória (Sistemas de Primeira e Segunda Ordem)Documento13 páginasAula - 03 - Análise Da Resposta Transitória (Sistemas de Primeira e Segunda Ordem)Lionildo LucyAinda não há avaliações
- Controle automático - Estabilidade de sistemasDocumento2 páginasControle automático - Estabilidade de sistemasLionildo LucyAinda não há avaliações
- Facts Worth Knowing Danfoss - p60-p84Documento25 páginasFacts Worth Knowing Danfoss - p60-p84Lionildo LucyAinda não há avaliações
- Controle por campo orientado de motor de indução com adaptação de parâmetros via MRACDocumento145 páginasControle por campo orientado de motor de indução com adaptação de parâmetros via MRACLionildo LucyAinda não há avaliações
- RASHID Power Electronics Handbook (Recovered) (Recovered 1) p251-p253Documento3 páginasRASHID Power Electronics Handbook (Recovered) (Recovered 1) p251-p253Lionildo LucyAinda não há avaliações
- RASHID Power Electronics Handbook (Recovered) (Recovered 1) p251-p253Documento3 páginasRASHID Power Electronics Handbook (Recovered) (Recovered 1) p251-p253Lionildo LucyAinda não há avaliações
- Como os inversores de frequência controlam a velocidade e torque dos motoresDocumento29 páginasComo os inversores de frequência controlam a velocidade e torque dos motoresLionildo LucyAinda não há avaliações
- Centrais Termoelectricas de CogeracãoDocumento56 páginasCentrais Termoelectricas de CogeracãoLionildo LucyAinda não há avaliações
- PEE1-Turbinas e Centrais Hidroelectricas-G9-Araujo JalaDocumento50 páginasPEE1-Turbinas e Centrais Hidroelectricas-G9-Araujo JalaLionildo LucyAinda não há avaliações
- RASHID Power Electronics Handbook (Recovered) (Recovered 1) p251-p253Documento3 páginasRASHID Power Electronics Handbook (Recovered) (Recovered 1) p251-p253Lionildo LucyAinda não há avaliações
- Facts Worth Knowing Danfoss - p60-p84Documento25 páginasFacts Worth Knowing Danfoss - p60-p84Lionildo LucyAinda não há avaliações
- Centrais Termoelectricas de CogeracãoDocumento56 páginasCentrais Termoelectricas de CogeracãoLionildo LucyAinda não há avaliações
- Trabalho 1 de Producao 2 Jala, Luciano e Baulene 23.05.2020Documento42 páginasTrabalho 1 de Producao 2 Jala, Luciano e Baulene 23.05.2020Lionildo LucyAinda não há avaliações
- Centrais Termoelectricas de CogeracãoDocumento56 páginasCentrais Termoelectricas de CogeracãoLionildo LucyAinda não há avaliações
- Informacao para Os Novos IngressosDocumento1 páginaInformacao para Os Novos IngressosLionildo LucyAinda não há avaliações
- Apresentacao PEE-2 Grupo VIDocumento49 páginasApresentacao PEE-2 Grupo VILionildo LucyAinda não há avaliações
- Carta para resolver dor de perda de amizadeDocumento4 páginasCarta para resolver dor de perda de amizadeJoão Emílio Damaceno dos SantosAinda não há avaliações
- (2001) Superinteressante 161 - Vacinas, A Cura Ou A DoençaDocumento8 páginas(2001) Superinteressante 161 - Vacinas, A Cura Ou A DoençaMarcus SevenAinda não há avaliações
- Doc3 - ISO 9001 - Comunicação Interna PDFDocumento3 páginasDoc3 - ISO 9001 - Comunicação Interna PDFzeliaornelasAinda não há avaliações
- Texto 04 - QuadriláterosDocumento8 páginasTexto 04 - QuadriláterosAbílio Júnior MubaiAinda não há avaliações
- Jô Soares - Apresentador Perdoou Taxista Que Matou Sua MãeDocumento7 páginasJô Soares - Apresentador Perdoou Taxista Que Matou Sua MãetezsfsadfAinda não há avaliações
- Excel 2016 AvancadoDocumento601 páginasExcel 2016 AvancadoJan MartinsAinda não há avaliações
- SONDA ROTATIVA CHECK LIST Atualizada 08 06 2020Documento1 páginaSONDA ROTATIVA CHECK LIST Atualizada 08 06 2020Marcos Antonio FelisardoAinda não há avaliações
- Memória de Martim FranciscoDocumento24 páginasMemória de Martim FranciscoVanderlei AmboniAinda não há avaliações
- Tecnologia Do Processamento de AlimentosDocumento450 páginasTecnologia Do Processamento de AlimentosFilipa PimentelAinda não há avaliações
- A Guilhotina de Hume e Kant, A Ignorância Dos Ateus Cientificistas e A Deturpação Da Filosofia (Contra Os Acadêmicos)Documento11 páginasA Guilhotina de Hume e Kant, A Ignorância Dos Ateus Cientificistas e A Deturpação Da Filosofia (Contra Os Acadêmicos)Jeff LavishAinda não há avaliações
- Regime de Lubrificação PDFDocumento2 páginasRegime de Lubrificação PDFMarcelo PereiraAinda não há avaliações
- Suprimento sangüíneo da cabeça e pescoçoDocumento19 páginasSuprimento sangüíneo da cabeça e pescoçoFlavia100% (1)
- Deficiência Mental e Fonoaudiologia - Passei DiretoDocumento8 páginasDeficiência Mental e Fonoaudiologia - Passei DiretoAlexsandraRibeiroAinda não há avaliações
- 1946 - 1964 A Experiência Democrática No BrasilDocumento8 páginas1946 - 1964 A Experiência Democrática No BrasilJosé Renato TeixeiraAinda não há avaliações
- Relatorio CNCDocumento8 páginasRelatorio CNCPOSTO FEITORIAAinda não há avaliações
- Resultado preliminar de candidatos com deficiênciaDocumento9 páginasResultado preliminar de candidatos com deficiênciaLícia CastroAinda não há avaliações
- Primeiros Socorros Básico ProvaDocumento5 páginasPrimeiros Socorros Básico ProvaDcastro Soares80% (5)
- VampiroDocumento79 páginasVampiroLuiz Henrique Matias MarcondesAinda não há avaliações
- Organização de Dados em Tabelas e GráficosDocumento12 páginasOrganização de Dados em Tabelas e GráficosLarissa FeijóAinda não há avaliações
- Estudo 01 - Que É Batismo Com o Espirito SantoDocumento3 páginasEstudo 01 - Que É Batismo Com o Espirito SantoHenrique JorgeAinda não há avaliações
- Diagnóstico tridimensional da faceDocumento180 páginasDiagnóstico tridimensional da facePaula Andrea MonroyAinda não há avaliações
- Contabilidade Gerencial, Slides - Rosana (CEFIS)Documento85 páginasContabilidade Gerencial, Slides - Rosana (CEFIS)tjesuscAinda não há avaliações
- Prefeitura Municipal de Vila-Velha Estado Do Espiríto Santo Secretaria Municipal de EducaçãoDocumento4 páginasPrefeitura Municipal de Vila-Velha Estado Do Espiríto Santo Secretaria Municipal de EducaçãoErica Dos Santos MascarenhasAinda não há avaliações
- Aula de Desfibrilador-Cardioversor EC TranspDocumento15 páginasAula de Desfibrilador-Cardioversor EC Transpjosuemax3Ainda não há avaliações
- Tabela de DRDocumento3 páginasTabela de DRSuzianeAinda não há avaliações
- Aula 09.replicação Do DNADocumento42 páginasAula 09.replicação Do DNArmdsAinda não há avaliações
- Tutorial LPIDocumento3 páginasTutorial LPIrandomerdreamerAinda não há avaliações
- Curso Técnico em Eletrotécnica: EletricidadeDocumento161 páginasCurso Técnico em Eletrotécnica: EletricidadeferanbaAinda não há avaliações
- Psicodrama Triádico para Dependentes QuímicosDocumento10 páginasPsicodrama Triádico para Dependentes QuímicosAdriana De Mello TridapalliAinda não há avaliações
- A Grande Fuga - Sylvio PereiraDocumento75 páginasA Grande Fuga - Sylvio Pereirahumb_santosAinda não há avaliações