Você também pode gostar
- ADAPTAÇÃO-NEUROMUSCULAR (Pós)Documento35 páginasADAPTAÇÃO-NEUROMUSCULAR (Pós)guiturc473Ainda não há avaliações
- Anatomia General Dos Musculos-1Documento13 páginasAnatomia General Dos Musculos-1martagumbauAinda não há avaliações
- Atlasmuscular 220608150627 Bbfa6f54 - 090608Documento20 páginasAtlasmuscular 220608150627 Bbfa6f54 - 090608Daniel SilvaAinda não há avaliações
- Apostila de MiologiaDocumento8 páginasApostila de MiologiaBrenda Guedes FerreiraAinda não há avaliações
- Sistema MuscularDocumento34 páginasSistema MuscularrerecaAinda não há avaliações
- MúsculosDocumento11 páginasMúsculoscristianAinda não há avaliações
- Fisiologia Do Sistema MuscularDocumento18 páginasFisiologia Do Sistema MuscularFortaleza TecnológicaAinda não há avaliações
- Sistema Muscular - Material de ApoioDocumento5 páginasSistema Muscular - Material de ApoioOzimar FroesAinda não há avaliações
- Fisiologia Do Exercicio 2Documento22 páginasFisiologia Do Exercicio 2Bruno de AraujoAinda não há avaliações
- Nutrição Aplicada Ao ExercícioDocumento51 páginasNutrição Aplicada Ao ExercícioRicardo BarbozaAinda não há avaliações
- Anatomia Muscular - ReflexosDocumento4 páginasAnatomia Muscular - ReflexosalmaformaAinda não há avaliações
- Função NeuromuscularDocumento79 páginasFunção NeuromuscularClaudio Cruz SantosAinda não há avaliações
- SanarFlix - Biofísica Da Contração MuscularDocumento34 páginasSanarFlix - Biofísica Da Contração MuscularGabriel Elias100% (1)
- Cópia de INSTITUTO SUPERIOR POLITÉCNICO TUNDAVALADocumento19 páginasCópia de INSTITUTO SUPERIOR POLITÉCNICO TUNDAVALAraissachanayAinda não há avaliações
- Nutrição Aplicada Ao ExercícioDocumento49 páginasNutrição Aplicada Ao ExercícioRafael LinharesAinda não há avaliações
- 4sistema Muscular PDFDocumento49 páginas4sistema Muscular PDFKiatalua Manuel NorbertoAinda não há avaliações
- ATV IDADE Sistema Musculo Esqueletico PDFDocumento2 páginasATV IDADE Sistema Musculo Esqueletico PDFMaria S. BorgesAinda não há avaliações
- Sistema+muscular+Seções+2 43 13,23 33 4Documento139 páginasSistema+muscular+Seções+2 43 13,23 33 4Denise CozachencoAinda não há avaliações
- Fisio Neuro ReflexosDocumento9 páginasFisio Neuro ReflexosLil LennonAinda não há avaliações
- TRABALHO DE BiomechanicsDocumento14 páginasTRABALHO DE BiomechanicsPaulo Piter Da GraçaAinda não há avaliações
- Anatomia Animal e HumanaDocumento15 páginasAnatomia Animal e HumanaPaulitoAinda não há avaliações
- Slide 7 e 8Documento66 páginasSlide 7 e 8sidioushenriAinda não há avaliações
- ED. Fisio 16.09Documento6 páginasED. Fisio 16.09Nilo BarretoAinda não há avaliações
- Sistema MuscularDocumento6 páginasSistema Musculardevid2010Ainda não há avaliações
- Aula Anatomia Sistema MuscularDocumento37 páginasAula Anatomia Sistema MuscularJosé Augusto Ceron100% (1)
- Livro Texto Eletroterapia 3Documento36 páginasLivro Texto Eletroterapia 3Bruna RascagliaAinda não há avaliações
- 03 Aula Sistema MuscularDocumento22 páginas03 Aula Sistema MuscularKenia Chaves0% (1)
- Microsoft Power Point - Aula 7 Sistema Muscular 1Documento30 páginasMicrosoft Power Point - Aula 7 Sistema Muscular 1mldexterAinda não há avaliações
- Aula 9 - Tecido MuscularDocumento38 páginasAula 9 - Tecido MuscularAlecsandra AlecsandraAinda não há avaliações
- 2 Contração e Excitação Do Músculo Esquelético.Documento41 páginas2 Contração e Excitação Do Músculo Esquelético.DeborasSouza100% (3)
- MiologiaDocumento22 páginasMiologiaBunga MavilacanaAinda não há avaliações
- 11 Contracao Muscular EsqueleticaDocumento10 páginas11 Contracao Muscular EsqueleticaFernando MouraAinda não há avaliações
- Histofisiologia NeuromuscularDocumento7 páginasHistofisiologia NeuromuscularJlc TeixeiraAinda não há avaliações
- Capitulo 8 Reumo Fisiologia GuytonDocumento4 páginasCapitulo 8 Reumo Fisiologia Guytonmuller maia100% (1)
- Seção+2 4+-+sistema+muscular+origem,+organização+geral+e+histologiaDocumento23 páginasSeção+2 4+-+sistema+muscular+origem,+organização+geral+e+histologiamegamenteAinda não há avaliações
- Sistema MuscularDocumento16 páginasSistema MuscularRose LinonAinda não há avaliações
- Tecido Muscular 2015Documento57 páginasTecido Muscular 2015Webert Martins MeloAinda não há avaliações
- Anatomia MuscularDocumento5 páginasAnatomia MuscularJosé Carlos JoséAinda não há avaliações
- Sistema MuscularDocumento20 páginasSistema MuscularIsabel PereiraAinda não há avaliações
- Fisiologia - Musculo EsqueléticoDocumento12 páginasFisiologia - Musculo EsqueléticoHumberto KabukiAinda não há avaliações
- Movimento E Suporte Do Corpo Humano: Sistema MuscularDocumento23 páginasMovimento E Suporte Do Corpo Humano: Sistema MuscularAndré AbreuAinda não há avaliações
- ANATOMMIADocumento10 páginasANATOMMIALacerda Luis MuteliAinda não há avaliações
- Trabalho BioCelDocumento28 páginasTrabalho BioCeljustskillzgtAinda não há avaliações
- Anatomia Do Aparelho Locomotor 3Documento37 páginasAnatomia Do Aparelho Locomotor 3waldete souzaAinda não há avaliações
- Miologia MoodleDocumento16 páginasMiologia MoodleEdson oliveiraAinda não há avaliações
- Tecido MuscularDocumento9 páginasTecido Muscularcristina MipatoAinda não há avaliações
- 11 Contracao Muscular EsqueleticaDocumento10 páginas11 Contracao Muscular Esqueleticam4rv4d0Ainda não há avaliações
- Seminário FisioDocumento30 páginasSeminário FisioLaura ScottAinda não há avaliações
- Fisiologia Do ExercícioDocumento19 páginasFisiologia Do ExercícioosvaldoAinda não há avaliações
- Fisiologia Do Sistema MuscularDocumento17 páginasFisiologia Do Sistema MuscularKaillany Andrade NaivaAinda não há avaliações
- Anatomia e Fisiologia Humana - UN2Documento31 páginasAnatomia e Fisiologia Humana - UN2Luciano ContiAinda não há avaliações
- Captura de Tela 2022-04-22 À(s) 21.53.04Documento51 páginasCaptura de Tela 2022-04-22 À(s) 21.53.04Karina SobreiraAinda não há avaliações
- Relatório - ASE 22 - Problema 01 - Tutoria ADocumento6 páginasRelatório - ASE 22 - Problema 01 - Tutoria AFernanda HerênioAinda não há avaliações
- Pilates 01Documento0 páginaPilates 01Gleiviane MatosAinda não há avaliações
- Nova Anatomia Do Aparelho Locomotor 2Documento39 páginasNova Anatomia Do Aparelho Locomotor 2ELISAMA LIMAAinda não há avaliações
- Ciências Integradas MorfofuncionaisDocumento2 páginasCiências Integradas MorfofuncionaisIara SouzaAinda não há avaliações
- Fortalecimento MuscularDocumento46 páginasFortalecimento MuscularLeticia FructuosoAinda não há avaliações
- Cinesiologia e BiomecânicaDocumento152 páginasCinesiologia e BiomecânicaFabio Fernandes100% (2)
- Neurociência da Hipertrofia: Desvendando os Segredos da Conexão Mente-MúsculoNo EverandNeurociência da Hipertrofia: Desvendando os Segredos da Conexão Mente-MúsculoAinda não há avaliações
- As cadeias fisiológicas- a cadeia visceral: abdome-pelve: descrição de tratamentoNo EverandAs cadeias fisiológicas- a cadeia visceral: abdome-pelve: descrição de tratamentoAinda não há avaliações
- Avaliando o Aprendizado 4 - Fisiologia Humana PDFDocumento2 páginasAvaliando o Aprendizado 4 - Fisiologia Humana PDFMarcia Nogueira FuturanutricionistaAinda não há avaliações
- Cito PlasmaDocumento29 páginasCito PlasmaAna Lúcia ZimmermannAinda não há avaliações
- Regulação HormonalDocumento46 páginasRegulação Hormonalbianca ferreiraAinda não há avaliações
- Características RN Pre e Pos TermoDocumento17 páginasCaracterísticas RN Pre e Pos TermoDinaiara PrestesAinda não há avaliações
- Jivha Pariksha Sou AyurvedaDocumento4 páginasJivha Pariksha Sou AyurvedaElisabete Castelo BrancoAinda não há avaliações
- Relatório Prática - Bases Da Biologia Celular, Molecular e Tecidual 1 (3) .Docx - 20231003 - 074645 - 0000Documento10 páginasRelatório Prática - Bases Da Biologia Celular, Molecular e Tecidual 1 (3) .Docx - 20231003 - 074645 - 0000heritareis3Ainda não há avaliações
- Esqueleto ApendicularDocumento39 páginasEsqueleto ApendicularAna Carolina PimentelAinda não há avaliações
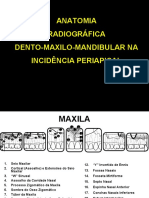
- TRABALHO DE ANATOMIA DENTO-MAXILO-MANDIBULAR - Estágio USP Noturno PDFDocumento90 páginasTRABALHO DE ANATOMIA DENTO-MAXILO-MANDIBULAR - Estágio USP Noturno PDFGiovanne Di FrancescantonioAinda não há avaliações
- Histologia Sistema Reprodutor FemininoDocumento45 páginasHistologia Sistema Reprodutor FemininoMaria NascimentoAinda não há avaliações
- Terminologia Na CinesiologiaDocumento6 páginasTerminologia Na CinesiologiaDani SoutoAinda não há avaliações
- Nervos CranianosDocumento17 páginasNervos CranianosLúcia Andrade100% (1)
- AVALIAÇÃO THOMPSON Inspirar - 230113 - 144607Documento4 páginasAVALIAÇÃO THOMPSON Inspirar - 230113 - 144607lineserafimAinda não há avaliações
- Resumo - Massagem ClássicaDocumento6 páginasResumo - Massagem ClássicaAndress2 Campos2Ainda não há avaliações
- Resumo - HemostasiaDocumento5 páginasResumo - HemostasiajuliaAinda não há avaliações
- Aparelho RespiratorioDocumento2 páginasAparelho RespiratorioFrancisco Bernardes de OliveiraAinda não há avaliações
- AnatomiaDocumento8 páginasAnatomiaSandro Santos vianaAinda não há avaliações
- Corpo Orgaos e Sistemas Fichas de EstudoDocumento19 páginasCorpo Orgaos e Sistemas Fichas de EstudofatimansiolAinda não há avaliações
- Semiologia - Boca e FaringeDocumento29 páginasSemiologia - Boca e FaringeWaltaganLopesAinda não há avaliações
- Resumo de AnatomiaDocumento22 páginasResumo de AnatomiaElse VivasAinda não há avaliações
- BiologiaCelula-Citologia Fácil para SpressadosDocumento39 páginasBiologiaCelula-Citologia Fácil para SpressadosAdna SilvaAinda não há avaliações
- Módulo 3Documento207 páginasMódulo 3Vanessa AlvesAinda não há avaliações
- Revisao Bio Bi 1 Unidade 2018Documento2 páginasRevisao Bio Bi 1 Unidade 2018Daniel S. ValleAinda não há avaliações
- Paginas 70 e 71Documento6 páginasPaginas 70 e 71ian lucasAinda não há avaliações
- Sistema MuscularDocumento49 páginasSistema MuscularPedro AmbrosioAinda não há avaliações
- Mapeamento Dos Pés Área 1Documento24 páginasMapeamento Dos Pés Área 1mila8pink100% (1)
- Fatores de CoagulaçãoDocumento9 páginasFatores de CoagulaçãoJéssica FernandesAinda não há avaliações
- Embriologia Do Sistema NervosoDocumento4 páginasEmbriologia Do Sistema NervosoMirla FontesAinda não há avaliações
- Seiva Bruta No Xilema:: Matilde CarvalhoDocumento14 páginasSeiva Bruta No Xilema:: Matilde CarvalhoMatilde da Silva CarvalhoAinda não há avaliações
- Anatomia e Fisiologia Humana DemoDocumento25 páginasAnatomia e Fisiologia Humana DemoDanniel Cabral Leão FerreiraAinda não há avaliações
- Gametogênese Alunos 2015Documento14 páginasGametogênese Alunos 2015Mylena karolyne Souza silvaAinda não há avaliações