Você também pode gostar
- Os primeiros filósofos da natureza: dos pré-socráticos a DemócritoDocumento1 páginaOs primeiros filósofos da natureza: dos pré-socráticos a DemócritoPaulo Freitas67% (3)
- Manual de Instruções para Motores Série Citius AGCO SISU POWERDocumento53 páginasManual de Instruções para Motores Série Citius AGCO SISU POWERJorcyCarvalho100% (2)
- Código ProntosDocumento3 páginasCódigo ProntosalexandreAinda não há avaliações
- Equatorial Pará Distribuidora de Energia S.A.: Informações para O ClienteDocumento1 páginaEquatorial Pará Distribuidora de Energia S.A.: Informações para O ClienteFlaviane Nunes Pinto100% (1)
- 3 - Formalismo LagrangianoDocumento11 páginas3 - Formalismo LagrangianoTharcísyo SáAinda não há avaliações
- Equações para Turbulência e o Problema de FechamentoDocumento25 páginasEquações para Turbulência e o Problema de FechamentoAndre RezendeAinda não há avaliações
- Dinâmica de Lagrange e HamiltonDocumento3 páginasDinâmica de Lagrange e HamiltonLucasAinda não há avaliações
- Teorema de Stokes PDFDocumento13 páginasTeorema de Stokes PDFMurillo HenriqueAinda não há avaliações
- Primitivação de funçõesDocumento25 páginasPrimitivação de funçõesSalvador MeloAinda não há avaliações
- Métodos Dos Elementos FinitosDocumento2 páginasMétodos Dos Elementos FinitosHerstein Matematica100% (1)
- MecanicaClassica PG Aula2 MBGD 2022 2Documento24 páginasMecanicaClassica PG Aula2 MBGD 2022 2Leonardo Camargo RossatoAinda não há avaliações
- Atomo de HidrogenioDocumento9 páginasAtomo de HidrogenioBassem MakhoulAinda não há avaliações
- A Hierarquia BBGKY1Documento14 páginasA Hierarquia BBGKY1Denny FranciscoAinda não há avaliações
- Resumo - Modelos Nucleares - ArtigoDocumento25 páginasResumo - Modelos Nucleares - Artigolcsmaia765Ainda não há avaliações
- Relatorio Trab2 e 3Documento7 páginasRelatorio Trab2 e 3lucas de macedoAinda não há avaliações
- Teoria do Funcional de Densidade para Sólidos CristalinosDocumento13 páginasTeoria do Funcional de Densidade para Sólidos CristalinosMatheus TeixeiraAinda não há avaliações
- Folha 1Documento4 páginasFolha 1guido porto rosaAinda não há avaliações
- EDP's ELÍPTICAS - MAT5812Documento100 páginasEDP's ELÍPTICAS - MAT5812Marcus Vinicius Sousa SousaAinda não há avaliações
- Formas DiferenciaisDocumento56 páginasFormas DiferenciaisNicolly RamalhoAinda não há avaliações
- Admin,+36795 151861 1 RVDocumento26 páginasAdmin,+36795 151861 1 RVAdriana N GarciaAinda não há avaliações
- Introdução à Mecânica LagrangianaDocumento38 páginasIntrodução à Mecânica LagrangianaGleizer FerreiraAinda não há avaliações
- Quantica Cap8Documento16 páginasQuantica Cap8tiago balieiroAinda não há avaliações
- AL 3 - Espaços VetoriaisDocumento5 páginasAL 3 - Espaços VetoriaisBruno dos SantosAinda não há avaliações
- Tabela de Derivadas Básicas para Alunos IniciantesDocumento4 páginasTabela de Derivadas Básicas para Alunos IniciantesJoao Raimundo FerreiraAinda não há avaliações
- (Transformada de Laplace-StieltjesDocumento67 páginas(Transformada de Laplace-StieltjesCauã Silva FerreiraAinda não há avaliações
- Aula 10Documento13 páginasAula 10Adriano MoschiniAinda não há avaliações
- Mecânica Analítica BackupDocumento22 páginasMecânica Analítica Backupleoderoccohotmail.comAinda não há avaliações
- 14disst2014cap PDFDocumento31 páginas14disst2014cap PDFDaniel Augusto FerreiraAinda não há avaliações
- Subvariedades Do Espaço EuclidianoDocumento25 páginasSubvariedades Do Espaço EuclidianoAna Júlia GomesAinda não há avaliações
- Aula 05Documento10 páginasAula 05victorAinda não há avaliações
- Partícula no Anel - Estudo DirigidoDocumento7 páginasPartícula no Anel - Estudo Dirigidoerick p freitasAinda não há avaliações
- Lista IDocumento4 páginasLista IMax Sacramento MartinsAinda não há avaliações
- Teorema de Riemann BisDocumento13 páginasTeorema de Riemann BisLeandroAinda não há avaliações
- EstudoDirigido1 0Documento7 páginasEstudoDirigido1 0Fernando SilvaAinda não há avaliações
- PS 4-1Documento9 páginasPS 4-1GabrielAinda não há avaliações
- V01a03 Calculo Fracionario AplicadoDocumento8 páginasV01a03 Calculo Fracionario AplicadoPaulo HenriqueAinda não há avaliações
- Partículas IdênticasDocumento21 páginasPartículas IdênticasGonçalo AlmeidaAinda não há avaliações
- Lagrangiana de sistemas com vínculosDocumento4 páginasLagrangiana de sistemas com vínculosMarcos BenícioAinda não há avaliações
- Capitulo 2Documento15 páginasCapitulo 2dougnovaesAinda não há avaliações
- Funções analíticas de variável complexaDocumento40 páginasFunções analíticas de variável complexaHugo RaçõesAinda não há avaliações
- Aula 23Documento13 páginasAula 23Adriano MoschiniAinda não há avaliações
- Mecânica Analítica - Simetrias e Leis de ConservaçãoDocumento5 páginasMecânica Analítica - Simetrias e Leis de ConservaçãoGabrielAinda não há avaliações
- Sobre o Teorema Quântico de Sommerfeld e de EpsteinDocumento5 páginasSobre o Teorema Quântico de Sommerfeld e de EpsteinBruno VescoviAinda não há avaliações
- O Princípio de Equivalência na Relatividade GeralDocumento3 páginasO Princípio de Equivalência na Relatividade Geralmarcos henriqueAinda não há avaliações
- Exame de seleção para doutorado em matemática da UFAMDocumento39 páginasExame de seleção para doutorado em matemática da UFAMroseane souzaAinda não há avaliações
- Notas de Quântica Do Prof Abraham - Cap. 4Documento31 páginasNotas de Quântica Do Prof Abraham - Cap. 4Igor SchreiberAinda não há avaliações
- Teoria Ergódica PDFDocumento70 páginasTeoria Ergódica PDFmonteiroAinda não há avaliações
- Fundamentos da Mecânica QuânticaDocumento41 páginasFundamentos da Mecânica QuânticaJuciene Teixeira SouzaAinda não há avaliações
- Primitivas e integração indefinida de funçõesDocumento12 páginasPrimitivas e integração indefinida de funçõesLuigy Bertaglia Bortolo0% (1)
- Movimento de corpo rígido em torno de um eixoDocumento5 páginasMovimento de corpo rígido em torno de um eixoPedro Sousa CastroAinda não há avaliações
- Central ForcesDocumento22 páginasCentral ForcesHenrique ToledoAinda não há avaliações
- MC EDP Texto ESPINDOLA VBienalDocumento15 páginasMC EDP Texto ESPINDOLA VBienalTeodósio VelosoAinda não há avaliações
- Sistemas Dinamicos e Ensaios PraticosDocumento5 páginasSistemas Dinamicos e Ensaios PraticosVinícius Moreira SouzaAinda não há avaliações
- Estudo das equações de Schwinger-Dyson na TQCDocumento16 páginasEstudo das equações de Schwinger-Dyson na TQCArrigo de FlandresAinda não há avaliações
- Curso de Cálculo: Módulo sobre IntegraisDocumento144 páginasCurso de Cálculo: Módulo sobre Integraisluis joseAinda não há avaliações
- 04 VodoviDocumento27 páginas04 VodoviSlaven IvanovicAinda não há avaliações
- Lista 9 de Cálculo Diferencial e Integral I - UFRPEDocumento2 páginasLista 9 de Cálculo Diferencial e Integral I - UFRPEJosé PaivaAinda não há avaliações
- Folha4 Mom AngularDocumento6 páginasFolha4 Mom AngularManel PaivaAinda não há avaliações
- Curvas_e_superficiesDocumento9 páginasCurvas_e_superficiesWellington José Leite Da SilvaAinda não há avaliações
- Calculoiv PDFDocumento65 páginasCalculoiv PDFMatheus AnjosAinda não há avaliações
- Vassalo Pereira - Curso de Física Estatística - Exercícios Resolvidos - 0Documento67 páginasVassalo Pereira - Curso de Física Estatística - Exercícios Resolvidos - 0erwinpomboAinda não há avaliações
- Seminario - Carlos - Hartree-FockDocumento9 páginasSeminario - Carlos - Hartree-FockRi GomesAinda não há avaliações
- Aprendendo a mecânica quântica: equação de Schrödinger em 1DNo EverandAprendendo a mecânica quântica: equação de Schrödinger em 1DAinda não há avaliações
- Microondas Philco 18 LitrosDocumento24 páginasMicroondas Philco 18 LitrosJose Luiz da SilvaAinda não há avaliações
- (BROWN) Química A Ciência Central - 13a Ed - NoRestrictionDocumento1.229 páginas(BROWN) Química A Ciência Central - 13a Ed - NoRestrictionGabriel Henrique PereiraAinda não há avaliações
- Catálogo de Peças - Space VanDocumento218 páginasCatálogo de Peças - Space VanRafael Fávaro100% (1)
- D7 3° Ano Ensino Médio Matemática RespostaDocumento4 páginasD7 3° Ano Ensino Médio Matemática RespostaAugusto SoaresAinda não há avaliações
- Questionários para Seminários - Preparacao para Teste 1Documento4 páginasQuestionários para Seminários - Preparacao para Teste 1joaquim mequeAinda não há avaliações
- CA 9 Ano Vol 1 - Aluno MatemáticaDocumento33 páginasCA 9 Ano Vol 1 - Aluno MatemáticaGabriela UlianAinda não há avaliações
- Fluxo de Caixa para Clínicas e ConsultóriosDocumento223 páginasFluxo de Caixa para Clínicas e Consultóriosjosenato1970Ainda não há avaliações
- Teores de CorteDocumento6 páginasTeores de CorteDavisson M. Francisco100% (3)
- Eletroquímica: Reações RedoxDocumento19 páginasEletroquímica: Reações RedoxMartinson FreitasAinda não há avaliações
- Manual Multímetro - Fluke 26 Series IIIDocumento12 páginasManual Multímetro - Fluke 26 Series IIIa.diedrichsAinda não há avaliações
- Estruturas Geodésicas PDFDocumento146 páginasEstruturas Geodésicas PDFGuilherme GnipperAinda não há avaliações
- Artigo Permeação Cutânea - Desafios e OportunidadesDocumento12 páginasArtigo Permeação Cutânea - Desafios e OportunidadesCaroline OdaAinda não há avaliações
- Material Intensivo MatematicaDocumento511 páginasMaterial Intensivo MatematicaMirlaineAinda não há avaliações
- Catálogo de Produtos 2021Documento12 páginasCatálogo de Produtos 2021José Arnaldo SilvaAinda não há avaliações
- TP2 - BioquimicaDocumento23 páginasTP2 - BioquimicaInes PereiraAinda não há avaliações
- Características Das Águas SubterrâneasDocumento42 páginasCaracterísticas Das Águas SubterrâneasLeandroAinda não há avaliações
- Curso Técnico em Informática - Banco de DadosDocumento17 páginasCurso Técnico em Informática - Banco de DadosCidinha SilvaAinda não há avaliações
- Roteiro Estruturas de MadeiraDocumento10 páginasRoteiro Estruturas de MadeiraBryan AlmeidaAinda não há avaliações
- Resumo Orgânica ExperimentalDocumento18 páginasResumo Orgânica ExperimentalLuana CarrazedoAinda não há avaliações
- 6 Tipos de Caminhões para Cargas Mais PesadasDocumento2 páginas6 Tipos de Caminhões para Cargas Mais PesadasElias IdianeAinda não há avaliações
- Analise de Trocadores Calor - Introducao - Media - LogaritmicaDocumento51 páginasAnalise de Trocadores Calor - Introducao - Media - LogaritmicaAtaliba LeonelAinda não há avaliações
- Análise financeira completa para pequenos negóciosDocumento53 páginasAnálise financeira completa para pequenos negóciosalec561Ainda não há avaliações
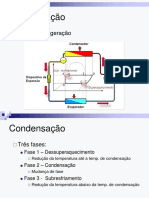
- Condensação. Ciclo de Refrigeração PDFDocumento38 páginasCondensação. Ciclo de Refrigeração PDFaislandesouza230% (1)
- Corrente Alternada - Circuitos Monofásicos e Circuitos Trifásicos (Powerpoint)Documento18 páginasCorrente Alternada - Circuitos Monofásicos e Circuitos Trifásicos (Powerpoint)Miguel Azevedo100% (2)
- Projeto de pilares de pontesDocumento6 páginasProjeto de pilares de pontesFábbio MirandaAinda não há avaliações
- EbookDocumento18 páginasEbookAndré DuarteAinda não há avaliações