Você também pode gostar
- Relatorio de COntrole Automatico - COntroladores PD, PI e PIDDocumento19 páginasRelatorio de COntrole Automatico - COntroladores PD, PI e PIDDiego YanezAinda não há avaliações
- 1 Operacional-Manual de TreinamentoDocumento95 páginas1 Operacional-Manual de TreinamentoCaio DinizAinda não há avaliações
- Resumo ControladoresDocumento3 páginasResumo ControladoresMarcela AlencarAinda não há avaliações
- Aula 10 Simulink Sintonia PIDDocumento53 páginasAula 10 Simulink Sintonia PIDMarcio DiegoAinda não há avaliações
- Semana 9Documento23 páginasSemana 9Jacques OliveiraAinda não há avaliações
- Prova N1Documento2 páginasProva N1Otavio LacerdaAinda não há avaliações
- Aulas FIC - CLPDocumento84 páginasAulas FIC - CLPGilnei LoschAinda não há avaliações
- Resumo Processos Industriais 2014 PDFDocumento5 páginasResumo Processos Industriais 2014 PDFJuliano MachadoAinda não há avaliações
- Exercícios InstrumentaçãoDocumento2 páginasExercícios Instrumentaçãoleandro3113100% (1)
- PID - Controle de Forma SimplesDocumento11 páginasPID - Controle de Forma SimplesivanlbragaAinda não há avaliações
- Controladores PIDDocumento14 páginasControladores PIDmarceloenderleAinda não há avaliações
- Instrument A Ç ÃoDocumento69 páginasInstrument A Ç ÃoLuisAinda não há avaliações
- 01-Overall Familiarization - PTDocumento93 páginas01-Overall Familiarization - PTpaulosouzabhAinda não há avaliações
- Controlador PID PDFDocumento19 páginasControlador PID PDFWesley Henrique MacielAinda não há avaliações
- Controlador PIDDocumento19 páginasControlador PIDWesley Henrique MacielAinda não há avaliações
- O Controle PID de Forma Simples e DescomplicadaDocumento13 páginasO Controle PID de Forma Simples e DescomplicadaDeividAinda não há avaliações
- Aula 10 - PCC - Controladores de ProcessosDocumento18 páginasAula 10 - PCC - Controladores de ProcessosthaysAinda não há avaliações
- Aula 01 - Instrumentação IndustrialDocumento20 páginasAula 01 - Instrumentação IndustrialPaula Gonçalves de SouzaAinda não há avaliações
- Operaçao e Manutençao de ColheitadeirasDocumento123 páginasOperaçao e Manutençao de ColheitadeiraspaulaoAinda não há avaliações
- Tarefa 5Documento9 páginasTarefa 5Alex LopesAinda não há avaliações
- SE 5 - Controladores PI PD e PIDDocumento37 páginasSE 5 - Controladores PI PD e PIDpriscila001Ainda não há avaliações
- 1° Trabalho de Automação Industrial 1-Questionário 2020Documento8 páginas1° Trabalho de Automação Industrial 1-Questionário 2020André BrightRevAinda não há avaliações
- Controladores On Off PD Pi PidDocumento1 páginaControladores On Off PD Pi PidGuilherme KwiatkowskiAinda não há avaliações
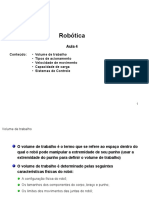
- Aula 4 Tipos de AcionamentoDocumento14 páginasAula 4 Tipos de AcionamentoAdriano AraujoAinda não há avaliações
- Trabalho Sobre Servomotor e Control Ad or PIDDocumento10 páginasTrabalho Sobre Servomotor e Control Ad or PIDCarlosAvlisAinda não há avaliações
- Instrumentos VDO-1Documento30 páginasInstrumentos VDO-1rawdir100% (1)
- CIA Vinha A - Treinamento Operacional TrimbleDocumento97 páginasCIA Vinha A - Treinamento Operacional TrimbleBeto Granja100% (4)
- O Controle PIDDocumento12 páginasO Controle PIDRui MendesAinda não há avaliações
- 4 - Acoes Controle Malha Fechada ExeDocumento27 páginas4 - Acoes Controle Malha Fechada ExeLuidy SiqueiraAinda não há avaliações
- 1.a Aula - CDG - Variáveis de Processo - IntroduçãoDocumento34 páginas1.a Aula - CDG - Variáveis de Processo - IntroduçãoRene LealAinda não há avaliações
- Controle - Tópico 1Documento9 páginasControle - Tópico 1kjonathas95Ainda não há avaliações
- Trabalho Av2 1Documento6 páginasTrabalho Av2 1Lincoln AlexandreAinda não há avaliações
- Instrumentaoindustrial 150410122315 Conversion Gate01Documento35 páginasInstrumentaoindustrial 150410122315 Conversion Gate01Allas JonyAinda não há avaliações
- Controladores n1030 n1040Documento8 páginasControladores n1030 n1040jaidinei Gomes da cruzAinda não há avaliações
- Automatismos e Autómatos - E-BookDocumento27 páginasAutomatismos e Autómatos - E-BookHugo Ferreira PintoAinda não há avaliações
- Aula 04 - Acoes Basicas de ControloDocumento19 páginasAula 04 - Acoes Basicas de ControloEsselino Luis RaimundoAinda não há avaliações
- Programação de Braço Robótico Utilizando PIC18F4550Documento27 páginasProgramação de Braço Robótico Utilizando PIC18F4550pedroh95Ainda não há avaliações
- Controle II. Estudo e Sintonia de Controladores IndustriaisDocumento56 páginasControle II. Estudo e Sintonia de Controladores IndustriaisRoger GimenesAinda não há avaliações
- Sistemas de ControloDocumento10 páginasSistemas de ControloBasilio CarlitosAinda não há avaliações
- Estudo Dirigido AMIVDocumento1 páginaEstudo Dirigido AMIVDouglas Braz PiovesanAinda não há avaliações
- Relatorio PID ItaloDocumento6 páginasRelatorio PID ItaloMkl JeffAinda não há avaliações
- Instruções e Controles de Sinais Analógicos para MicrologixDocumento13 páginasInstruções e Controles de Sinais Analógicos para MicrologixJulho100% (1)
- 805890-Sistema de Controle Controlador PIDDocumento28 páginas805890-Sistema de Controle Controlador PIDJúlio PabloAinda não há avaliações
- Aula 2 Sistemas de Controle Malha Aberta e FechadaDocumento20 páginasAula 2 Sistemas de Controle Malha Aberta e FechadaAllan GumesAinda não há avaliações
- Instrumentação e ControleDocumento12 páginasInstrumentação e ControleJefferson BrittoAinda não há avaliações
- MedidasDocumento18 páginasMedidasFernandes ManuelAinda não há avaliações
- A3 MatheusDocumento11 páginasA3 MatheusMatheus EduardoAinda não há avaliações
- 1 - Identificando Elementos de Um Sistema de Controle de MovimentoDocumento18 páginas1 - Identificando Elementos de Um Sistema de Controle de MovimentoRodrigo FogaçaAinda não há avaliações
- Controle PIDDocumento17 páginasControle PIDubbi_wanAinda não há avaliações
- Questionario de InstrumentaçãoDocumento2 páginasQuestionario de Instrumentaçãoyuri_benjamimAinda não há avaliações
- CONTROLE (Ações de Controle)Documento33 páginasCONTROLE (Ações de Controle)Paulo VictorAinda não há avaliações
- Instrumentação E Controle IDocumento131 páginasInstrumentação E Controle IwsmachadoAinda não há avaliações
- Aula - 6 (Controladores Na Automação)Documento24 páginasAula - 6 (Controladores Na Automação)barataaaaAinda não há avaliações
- Instrumentacao Livro 2Documento45 páginasInstrumentacao Livro 2Michel De Mattos FernandesAinda não há avaliações
- 4.a Aula - N7SRV - Modos de ControleDocumento28 páginas4.a Aula - N7SRV - Modos de ControleVinicius BoariAinda não há avaliações
- Introdução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No PicNo EverandIntrodução Aos Sistemas De Controle Com Implementação De Pid E Fuzzy No PicAinda não há avaliações
- Monitorando Um Hidrômetro Com O Pic E Android Programado No App InventorNo EverandMonitorando Um Hidrômetro Com O Pic E Android Programado No App InventorAinda não há avaliações
- Lendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoNo EverandLendo Um Encoder Para Controle De Velocidade De Motor Dc Com Base No ArduinoAinda não há avaliações
- N1107 (1) (Salvo Automaticamente)Documento9 páginasN1107 (1) (Salvo Automaticamente)Marineth LopesAinda não há avaliações
- AULA 16 - Tintas Na Construo CivilDocumento41 páginasAULA 16 - Tintas Na Construo CivilVinícius FrançaAinda não há avaliações
- Thiago Daboit RobertoDocumento118 páginasThiago Daboit RobertorogerAinda não há avaliações
- Determinação Da Distribuição de Tempos de Residência em Reator CSTRDocumento22 páginasDeterminação Da Distribuição de Tempos de Residência em Reator CSTRLucas ViníciusAinda não há avaliações
- Geometria TrigonometriaDocumento4 páginasGeometria TrigonometriaAnaAinda não há avaliações
- 1653667375173+instalações Eletrica 4Documento28 páginas1653667375173+instalações Eletrica 4João Lucas Mendes WetlerAinda não há avaliações
- Abracopel NBR 16384Documento19 páginasAbracopel NBR 16384ViniciusAinda não há avaliações
- Equipamentos - SE - Completo 1 PDFDocumento57 páginasEquipamentos - SE - Completo 1 PDFltavila2014Ainda não há avaliações
- Manual SBTDocumento29 páginasManual SBTGabrielGomesAinda não há avaliações
- Atsc Final Cheat Sheet PDFDocumento3 páginasAtsc Final Cheat Sheet PDFScribdTranslationsAinda não há avaliações
- Sensoriamento RemotoDocumento54 páginasSensoriamento RemotoMateus Tewito Lobo Savele100% (2)
- Ae - Le 1 - Un 1 - Propriedades Geométricas de Seções PlanasDocumento7 páginasAe - Le 1 - Un 1 - Propriedades Geométricas de Seções PlanasEduardo DelfinoAinda não há avaliações
- Manual Tecnico 903kDocumento1.196 páginasManual Tecnico 903kTulio ClementeAinda não há avaliações
- Preservação e Conservação de Papeis - Helen IkedaDocumento16 páginasPreservação e Conservação de Papeis - Helen Ikedabernardete oliveiraAinda não há avaliações
- Avaliação de Recuperação Semestral de QuímicaDocumento2 páginasAvaliação de Recuperação Semestral de QuímicaMari LemesAinda não há avaliações
- Apêndice 13 - Operação Do BRTDocumento7 páginasApêndice 13 - Operação Do BRTrafabarsiAinda não há avaliações
- Amplificadores Com Transistor UnipolarDocumento15 páginasAmplificadores Com Transistor UnipolarSobre tudo e menos nadaAinda não há avaliações
- Notas Aulas Módulo II FinalDocumento37 páginasNotas Aulas Módulo II FinalJorge twttAinda não há avaliações
- SUN2000 - (8KTL-20KTL) - M2 Manual Do UsuárioDocumento116 páginasSUN2000 - (8KTL-20KTL) - M2 Manual Do Usuárioregina celli lins de oliveiraAinda não há avaliações
- Colorimetria 2020Documento27 páginasColorimetria 2020Carlos Antonio firminoAinda não há avaliações
- Manual Forno Brastemp BO360Documento32 páginasManual Forno Brastemp BO360Marcos Roberto100% (1)
- Teste de Diagnostico MAT 3anoDocumento2 páginasTeste de Diagnostico MAT 3anomarisa cimentaAinda não há avaliações
- MC1-Aula 3Documento37 páginasMC1-Aula 3Martin MitsengaAinda não há avaliações
- Tubos ErmetoDocumento249 páginasTubos ErmetoAndre alexander dos santosAinda não há avaliações
- Parametrização Inversor Sinovo SD200 - Policomp2Documento1 páginaParametrização Inversor Sinovo SD200 - Policomp2Antonio PassosAinda não há avaliações
- Tópico 3 Manometria EXERCÍCIOS RESOLVIDOS 2020 I TesteDocumento12 páginasTópico 3 Manometria EXERCÍCIOS RESOLVIDOS 2020 I TesteJanyson Karllos100% (2)
- 12-08-13 ENSAIO MANHÃ EGL - 12,5mmDocumento3 páginas12-08-13 ENSAIO MANHÃ EGL - 12,5mmJoão PauloAinda não há avaliações
- Manual Pressurizador pb088-135-250Documento8 páginasManual Pressurizador pb088-135-250Eduardo RodriguesAinda não há avaliações
- Ficha 7 - QGDocumento7 páginasFicha 7 - QGOrenço JumaAinda não há avaliações