Você também pode gostar
- Exercicios de Telecinese - CompletoDocumento6 páginasExercicios de Telecinese - Completoryotchan87% (15)
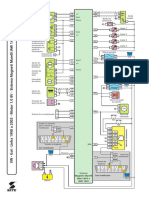
- VW Gol 1998 A 2002 1.0 16V Sistema Magneti Marelli I AW 1AVI IAW 1AVS PDFDocumento2 páginasVW Gol 1998 A 2002 1.0 16V Sistema Magneti Marelli I AW 1AVI IAW 1AVS PDFWagnerMenezes50% (2)
- Curso Básico Esquadrias de AlumínioDocumento47 páginasCurso Básico Esquadrias de Alumínioned695% (19)
- Manual para Fabricar ViolaoDocumento26 páginasManual para Fabricar ViolaoAlessandre Oliveira100% (8)
- Introducao A Filosofia de Spinosa - Amauri Ferreira PDFDocumento65 páginasIntroducao A Filosofia de Spinosa - Amauri Ferreira PDFEmanuel Luz0% (1)
- Aula 10 - PQP - Produção de Ferro e Aço PDFDocumento48 páginasAula 10 - PQP - Produção de Ferro e Aço PDFgiselechavesAinda não há avaliações
- Eletro 5410 PDFDocumento14 páginasEletro 5410 PDFCarla LuizAinda não há avaliações
- Munir El Debs 010308Documento1 páginaMunir El Debs 010308dhf_pereiraAinda não há avaliações
- Fichas de Validação Stc7 TarDocumento13 páginasFichas de Validação Stc7 TarDomingos PinhoAinda não há avaliações
- Apostila de GnosiologiaDocumento27 páginasApostila de GnosiologiaVania Sofia100% (1)
- CAPÍTULO 10 - RotaçõesDocumento34 páginasCAPÍTULO 10 - RotaçõesjclaudiocpAinda não há avaliações
- 2 - Rotação - 19mar20Documento18 páginas2 - Rotação - 19mar20Renato Pereira (RenatoSky)Ainda não há avaliações
- 3 - Rotação, Rolamento e Torque - 26mar20Documento55 páginas3 - Rotação, Rolamento e Torque - 26mar20Clayton RayAinda não há avaliações
- 2 - Rotação PDFDocumento33 páginas2 - Rotação PDFCauan ProductionsAinda não há avaliações
- Dinamica Das Rotacoes FISICADocumento14 páginasDinamica Das Rotacoes FISICASteffanyeAinda não há avaliações
- Aceleração de CoriolisDocumento25 páginasAceleração de CoriolisFelipeAinda não há avaliações
- Aula 05 - Vibrações - Rotação Corpo RigidoDocumento29 páginasAula 05 - Vibrações - Rotação Corpo RigidoRicardo PereiraAinda não há avaliações
- Momento AngularDocumento4 páginasMomento AngularCleyton FariaAinda não há avaliações
- Notas de Aula - Momento AngularDocumento35 páginasNotas de Aula - Momento AngularDaniel PinhoAinda não há avaliações
- Lista Rotação, Equilibrio (Fis II)Documento26 páginasLista Rotação, Equilibrio (Fis II)bms.pradoAinda não há avaliações
- Rolamento Torque e Momento AngularDocumento17 páginasRolamento Torque e Momento AngularJuliana Rosa0% (1)
- R Sen: DL LhelDocumento5 páginasR Sen: DL Lhelpmarcal9803Ainda não há avaliações
- Trabalho de Rotacao FisicaDocumento15 páginasTrabalho de Rotacao Fisicajose celioAinda não há avaliações
- Rotacoes Dos Corpos Rigidos GabaritoDocumento18 páginasRotacoes Dos Corpos Rigidos GabaritoLeonardo FarinaAinda não há avaliações
- Módulo VIDocumento49 páginasMódulo VIismaeldownloadAinda não há avaliações
- Momento AngularDocumento29 páginasMomento AngularMarcos CastroAinda não há avaliações
- RotaçãoBDocumento21 páginasRotaçãoBermelindo juliaoAinda não há avaliações
- R Sen: TotalDocumento6 páginasR Sen: Totalpmarcal9803Ainda não há avaliações
- P3 - FundMec - 2018 - 1Documento4 páginasP3 - FundMec - 2018 - 1MacelleAinda não há avaliações
- Aula - Dinâmica de Um Corpo RígidoDocumento15 páginasAula - Dinâmica de Um Corpo RígidoFernandoAinda não há avaliações
- 3a Conferência de Mecânica TeóricaDocumento25 páginas3a Conferência de Mecânica TeóricaLinoAntonioAinda não há avaliações
- Aula 10 Rotacao Momento AngularDocumento16 páginasAula 10 Rotacao Momento AngularDouglas ManciniAinda não há avaliações
- Rotacao Do Momento AngularDocumento7 páginasRotacao Do Momento Angularfrancisco2mixAinda não há avaliações
- Aula Teórica 04 22.23 Cinemática Da Rotação em Torno de Eixo FixoDocumento3 páginasAula Teórica 04 22.23 Cinemática Da Rotação em Torno de Eixo FixoZé engenheiroAinda não há avaliações
- Lista 06 FMDocumento2 páginasLista 06 FMLucas PazAinda não há avaliações
- Teoria GIROSCÓPIODocumento19 páginasTeoria GIROSCÓPIOMarina Pimentel MorenoAinda não há avaliações
- FGLEGI 2023 2024 Slides06 CorpoRigidoDocumento38 páginasFGLEGI 2023 2024 Slides06 CorpoRigidojoel freire alvesAinda não há avaliações
- CINEMATICADocumento59 páginasCINEMATICAfernandoenzodossantosbarrosAinda não há avaliações
- Cinematica Dos Corpos RigidosDocumento7 páginasCinematica Dos Corpos RigidosAlexandre AmorimAinda não há avaliações
- Aula 6Documento25 páginasAula 6Azt RibAinda não há avaliações
- Apostila de Física (Resumo + Questões)Documento93 páginasApostila de Física (Resumo + Questões)Santos RdsAinda não há avaliações
- Forças e MovimentosDocumento12 páginasForças e MovimentosEduDona 9Ainda não há avaliações
- Lista 05 Rotacao Momento Angular IQDocumento9 páginasLista 05 Rotacao Momento Angular IQTennyson Accetti Resende FilhoAinda não há avaliações
- TÓPICOS INTEGRADORES I - Webaula 2Documento39 páginasTÓPICOS INTEGRADORES I - Webaula 2Daniel JuniorAinda não há avaliações
- Rotacao 2Documento10 páginasRotacao 2Henrique MarceloAinda não há avaliações
- M8 - Movimento Circular UniformeDocumento27 páginasM8 - Movimento Circular UniformeDD VitoldasAinda não há avaliações
- 2017 PsubDocumento8 páginas2017 PsubFelipe AdrianAinda não há avaliações
- Dinâmica Do Corpo RigidoDocumento107 páginasDinâmica Do Corpo RigidoUemerson CoelhoAinda não há avaliações
- Cap11 - Cinemática Rotacional - Material de Introdução À Mecânica ClássicaDocumento10 páginasCap11 - Cinemática Rotacional - Material de Introdução À Mecânica ClássicaMoisés AlvesAinda não há avaliações
- Cálculo de Momentos de Inércia PDFDocumento8 páginasCálculo de Momentos de Inércia PDFphael_garridoAinda não há avaliações
- Aula03-Mecânica GeralDocumento19 páginasAula03-Mecânica GeralCarlos AurelioAinda não há avaliações
- Cinemática e Dinâmica Da RotaçãoDocumento6 páginasCinemática e Dinâmica Da RotaçãoBruna RolimAinda não há avaliações
- Movimento Circular - SlidesDocumento19 páginasMovimento Circular - SlidesFísica 1o, 2o e 3o EsqAinda não há avaliações
- Rotação de Corpos EsféricosDocumento18 páginasRotação de Corpos EsféricosLeandro TeodoroAinda não há avaliações
- Dinamica Do Corpo RigidoDocumento5 páginasDinamica Do Corpo RigidoAlberto Jaime JaimeAinda não há avaliações
- Aula - Cinemática de RotaçãoDocumento14 páginasAula - Cinemática de RotaçãoFernandoAinda não há avaliações
- Turma Olímpica McuDocumento12 páginasTurma Olímpica Mcumaclaudio100% (1)
- 4.1-Cinematica Do SolidoDocumento58 páginas4.1-Cinematica Do SolidoEduardo BittencourtAinda não há avaliações
- Colisaobidimesional 1Documento4 páginasColisaobidimesional 1Pedro BAinda não há avaliações
- GIROSCÓPIO - Documentos GoogleDocumento11 páginasGIROSCÓPIO - Documentos GoogleAndré LuisAinda não há avaliações
- Cinemética Dos Corpos RígidosDocumento34 páginasCinemética Dos Corpos RígidosandreflsoaresAinda não há avaliações
- Movimento Circular (MC) E Acoplamento de Polias, Movimento Circular Uniforme (Mcu)Documento12 páginasMovimento Circular (MC) E Acoplamento de Polias, Movimento Circular Uniforme (Mcu)ricardohosana.esefAinda não há avaliações
- Movimento Circular Uniforme PDFDocumento9 páginasMovimento Circular Uniforme PDFVirgínia Torres da SilvaAinda não há avaliações
- 3 Aula Do Cap. 06: Atrito E Movimento CircularDocumento22 páginas3 Aula Do Cap. 06: Atrito E Movimento CircularfrechesAinda não há avaliações
- Cinematica de Corpos Rigidos Parte IDocumento20 páginasCinematica de Corpos Rigidos Parte Ipaulacristina.conteudistaAinda não há avaliações
- Anexo 6 - Permissπo de Trabalho a QuenteDocumento3 páginasAnexo 6 - Permissπo de Trabalho a QuenteJorge perezAinda não há avaliações
- Química - Pré-Vestibular Impacto - Misturas Do Dia-DiaDocumento2 páginasQuímica - Pré-Vestibular Impacto - Misturas Do Dia-DiaQuímica Qui100% (3)
- Polivinil Pirrolidona 90Documento1 páginaPolivinil Pirrolidona 90maodesusAinda não há avaliações
- ADDI - 2010-1-Eng Civil Prova ADocumento39 páginasADDI - 2010-1-Eng Civil Prova AAndrey Luciano0% (1)
- Polaridade Das LigaçõesDocumento11 páginasPolaridade Das LigaçõesjianzinhooAinda não há avaliações
- Trabalho Automação Veicular PDFDocumento7 páginasTrabalho Automação Veicular PDFAlexandre FoglieniAinda não há avaliações
- Relatório Hidráulica RessaltoDocumento8 páginasRelatório Hidráulica RessaltoWesley AlexandreAinda não há avaliações
- Lista 1Documento1 páginaLista 1Juarez DenadaiAinda não há avaliações
- Segurança Na Execução de Obras e Serviços de ConstruçãoDocumento112 páginasSegurança Na Execução de Obras e Serviços de ConstruçãoAntonio Fernando Navarro100% (1)
- Movimentos Com Velocidade VariávelDocumento2 páginasMovimentos Com Velocidade VariávelAlerric Gonçalves100% (1)
- Fagundes Varela - A Lenda Do Amazonas PDFDocumento4 páginasFagundes Varela - A Lenda Do Amazonas PDFfrm2004Ainda não há avaliações
- PT - DT.PDN.03.14.005 Rev 02Documento190 páginasPT - DT.PDN.03.14.005 Rev 02Celis GomesAinda não há avaliações
- Aula1 Luis HenriqueDocumento22 páginasAula1 Luis HenriqueEduardo FariasAinda não há avaliações
- Lista 1 - Resolução - EletromagDocumento9 páginasLista 1 - Resolução - EletromagRafaelyamiyo100% (1)
- Glossário de InstrumentaçãoDocumento20 páginasGlossário de InstrumentaçãoWalter KardozoAinda não há avaliações
- Vt7ema TagDocumento6 páginasVt7ema Tagcarlbisp1Ainda não há avaliações
- Parte3-FIBRAS TÊXTEIS QUÍMICASDocumento41 páginasParte3-FIBRAS TÊXTEIS QUÍMICASfmaesta0% (1)
- 4a Aula. Topografia - AltimetriaDocumento29 páginas4a Aula. Topografia - AltimetriawagnumAinda não há avaliações
- 01 - Classificação Da Matéria - Introdução À Teoria Atômica Da Matéria - 2018Documento57 páginas01 - Classificação Da Matéria - Introdução À Teoria Atômica Da Matéria - 2018Chinese WalkerAinda não há avaliações
- Plano de Aula e Conteúdo - ProbabilidadeDocumento20 páginasPlano de Aula e Conteúdo - ProbabilidadeBruno SanchesAinda não há avaliações