Você também pode gostar
- Mecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCDocumento8 páginasMecatrônica Atual - Controladores PID (Analógico e Digital) Aplicados em Um Motor CCMarcelo SilvaAinda não há avaliações
- Laboratório 12: Universidade Federal Do Ceará Curso de Engenharia Elétrica Máquinas ElétricasDocumento9 páginasLaboratório 12: Universidade Federal Do Ceará Curso de Engenharia Elétrica Máquinas ElétricasLaianaSeveriano PereiraAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViAinda não há avaliações
- Situação de Aprendizagem 2º Período EletrônicaDocumento7 páginasSituação de Aprendizagem 2º Período EletrônicaGustavo MelnecenkoAinda não há avaliações
- Relatorio Motor DCDocumento16 páginasRelatorio Motor DCGabrielAinda não há avaliações
- Relatório Do Experimento1Documento10 páginasRelatório Do Experimento1Ryan EdwardsAinda não há avaliações
- Exercícios AcionamentosDocumento2 páginasExercícios AcionamentosRuth Souza BritoAinda não há avaliações
- Guia de Laboratorio de Maquinas Eletricas I - MotorDocumento7 páginasGuia de Laboratorio de Maquinas Eletricas I - MotorlnetinholAinda não há avaliações
- Regulacao Da Velocidade de Motores C.ADocumento17 páginasRegulacao Da Velocidade de Motores C.ASadraque100% (3)
- Maquinas EletricasDocumento44 páginasMaquinas EletricascrisfrgtAinda não há avaliações
- TCC - Eficiência Energética em Motores Elétricos Trifásicos de Indução PDFDocumento7 páginasTCC - Eficiência Energética em Motores Elétricos Trifásicos de Indução PDFnpjoelmaAinda não há avaliações
- Relatório de Acionamento de Máquinas ElétricasDocumento10 páginasRelatório de Acionamento de Máquinas ElétricaswaynemarquesAinda não há avaliações
- Cópia Traduzida de F57aDocumento9 páginasCópia Traduzida de F57aandre ivoAinda não há avaliações
- Motor Shunt AtualizadoDocumento13 páginasMotor Shunt AtualizadoMilton ManjateAinda não há avaliações
- Maquina Corrente Continua Com Excitação IndependenteDocumento15 páginasMaquina Corrente Continua Com Excitação IndependenteTiago Martins100% (1)
- Resumo Cap-7 MamedeDocumento9 páginasResumo Cap-7 MamedeMICHELLY CARVALHO DA SILVAAinda não há avaliações
- Motor Shunt AtualizadoDocumento13 páginasMotor Shunt AtualizadoMilton ManjateAinda não há avaliações
- Controladores PID (Analógico e Digital) Aplicados em Um Motor CC - Mecatrônica Atual - Automação Industrial de Processos e ManufaturaDocumento11 páginasControladores PID (Analógico e Digital) Aplicados em Um Motor CC - Mecatrônica Atual - Automação Industrial de Processos e Manufaturaheliosmariano8350Ainda não há avaliações
- Apresentação Motor CADocumento36 páginasApresentação Motor CAWagner AraújoAinda não há avaliações
- Máquinas Elétricas II: Máquina de Corrente Contínua em Regime GeradorDocumento15 páginasMáquinas Elétricas II: Máquina de Corrente Contínua em Regime Geradorfootballmanager961Ainda não há avaliações
- Artigo Motor DC e PID AnalógicoDocumento9 páginasArtigo Motor DC e PID AnalógicolucapetaAinda não há avaliações
- Ensaio Motor CC PDFDocumento35 páginasEnsaio Motor CC PDFRogérioPaganiniValentini100% (4)
- SEL 423-Gerador-Indução RevDocumento11 páginasSEL 423-Gerador-Indução RevRonaldo PinattiAinda não há avaliações
- Exp7 - GERADORES DE INDUÇÃO EXCITADOS PELA REDE E AUTOEXCITADOSDocumento11 páginasExp7 - GERADORES DE INDUÇÃO EXCITADOS PELA REDE E AUTOEXCITADOSLucas SilveiraAinda não há avaliações
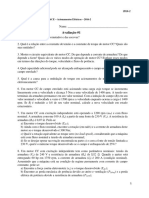
- Avaliação FinalDocumento9 páginasAvaliação FinalEberton SantosAinda não há avaliações
- Experimento 01 - Motores de InduçãoDocumento9 páginasExperimento 01 - Motores de InduçãoEng. Clínica Hosp. 9 de JulhoAinda não há avaliações
- PWM Final MesmoDocumento18 páginasPWM Final MesmoMatheus Zimmer100% (1)
- Trabalho Sobre Maquinas de Indução TrifásicaDocumento6 páginasTrabalho Sobre Maquinas de Indução TrifásicaRubya SouzaAinda não há avaliações
- Determinação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoDocumento7 páginasDeterminação Dos Parâmetros de Um Motor de Indução Trifásico SimétricoCesar MaiaAinda não há avaliações
- A Ndqymkexmtmwra Prova 2bimDocumento2 páginasA Ndqymkexmtmwra Prova 2bimRafael CordoAinda não há avaliações
- Relatório de Máquinas 02 - Brenda FarahDocumento9 páginasRelatório de Máquinas 02 - Brenda FarahBrenda Montes Cardoso FarahAinda não há avaliações
- Motor CC SiemensDocumento9 páginasMotor CC Siemensgpamaster-1Ainda não há avaliações
- ListaFinalAcionamentos 2002Documento4 páginasListaFinalAcionamentos 2002Vanildo SilvaAinda não há avaliações
- Exercicios Caracterizacao Sistemas Nao Lineares2Documento4 páginasExercicios Caracterizacao Sistemas Nao Lineares2FlavioAinda não há avaliações
- Relatorio Motor Gerador CC 1Documento10 páginasRelatorio Motor Gerador CC 1Joao CarvalhoAinda não há avaliações
- 05 - GCC - Curva de Magnetização e Regulação de TensãoDocumento3 páginas05 - GCC - Curva de Magnetização e Regulação de TensãoZTE TREZEAinda não há avaliações
- Laboratório Curvas V e V Invertido de Máquinas SíncronasDocumento5 páginasLaboratório Curvas V e V Invertido de Máquinas SíncronasRoger Halmenschlager da Silva100% (2)
- Relatorio 6Documento5 páginasRelatorio 6Felipe LucasAinda não há avaliações
- UntitledDocumento7 páginasUntitledLucas RenanAinda não há avaliações
- Reostato Partida MCCDocumento3 páginasReostato Partida MCCPaulo SouzaAinda não há avaliações
- UntitledDocumento3 páginasUntitledThiago OmenaAinda não há avaliações
- Tipos de Partida de Motores ElétricosDocumento4 páginasTipos de Partida de Motores ElétricosRicardo AnjosAinda não há avaliações
- 03.3 - Aplicação de Simbologia e Diagramas Elétricos - AcionamentoDocumento10 páginas03.3 - Aplicação de Simbologia e Diagramas Elétricos - AcionamentoLeandersonAinda não há avaliações
- Motor SincronoDocumento13 páginasMotor SincronoFelipe FreireAinda não há avaliações
- Apostila Motores de Indução e Comandos ElétricosDocumento61 páginasApostila Motores de Indução e Comandos ElétricosMinerin Das Gerais100% (1)
- Inversores de Frequencia1Documento46 páginasInversores de Frequencia1FelpeAinda não há avaliações
- FICHA2 - Máquinas de Corrente ContinuaDocumento5 páginasFICHA2 - Máquinas de Corrente ContinuaNobercioAinda não há avaliações
- PTG Ele 7-8 - NMead21768586Documento26 páginasPTG Ele 7-8 - NMead21768586Izabela de Cássia FerreiraAinda não há avaliações
- PL05 - Relatório Máquinas Combustão InternaDocumento7 páginasPL05 - Relatório Máquinas Combustão InternaAndré MarçaloAinda não há avaliações
- Ace Av1 2016 2Documento3 páginasAce Av1 2016 2alan_smoAinda não há avaliações
- Relatório Partida DiretaDocumento16 páginasRelatório Partida DiretaGabriel ChieregatoAinda não há avaliações
- Projeto Integrador AS 1 - Circuito de Automação Parte 1Documento7 páginasProjeto Integrador AS 1 - Circuito de Automação Parte 1Janie Lucy100% (2)
- Rap U4.3Documento10 páginasRap U4.3Matheus SimõesAinda não há avaliações
- Caixa de Redução e Motor PDFDocumento10 páginasCaixa de Redução e Motor PDFMarcos AntonioAinda não há avaliações
- Atividade de Pesquisa - Atualizada - 05.2022Documento3 páginasAtividade de Pesquisa - Atualizada - 05.2022Clibson Mendes100% (1)
- Aula - 06 Eletricidade IndustrialDocumento21 páginasAula - 06 Eletricidade IndustrialcunhaodeboiAinda não há avaliações
- Ed10 G01T04Documento3 páginasEd10 G01T04Rodrigo ResendeAinda não há avaliações
- PTG Ele 7-8Documento26 páginasPTG Ele 7-8Izabela de Cássia FerreiraAinda não há avaliações
- Imetro Modulos - Leapton 665Documento2 páginasImetro Modulos - Leapton 665Ruthiany OliveiraAinda não há avaliações
- Certificado Inmetro - Inversor Renac 3KDocumento1 páginaCertificado Inmetro - Inversor Renac 3KRuthiany Oliveira50% (2)
- Datasheet 3KB-XSDocumento1 páginaDatasheet 3KB-XSRuthiany OliveiraAinda não há avaliações
- Registro - Inmetro Inversor Deye 8kDocumento2 páginasRegistro - Inmetro Inversor Deye 8kRuthiany OliveiraAinda não há avaliações
- Lista MITDocumento1 páginaLista MITRuthiany OliveiraAinda não há avaliações
- ABNT NBR 6123 (1988) - Forças Devidas Ao Vento em EdificaçõesDocumento66 páginasABNT NBR 6123 (1988) - Forças Devidas Ao Vento em EdificaçõesBárbara CastroAinda não há avaliações
- Fundamentos Da HarmoniaDocumento108 páginasFundamentos Da HarmoniaJoao Roberto Pereira100% (3)
- Dilatação TérmicaDocumento10 páginasDilatação TérmicaCarol MouraAinda não há avaliações
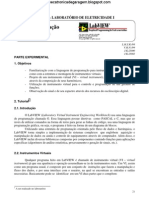
- Instrumentação Virtual Com LabviewDocumento20 páginasInstrumentação Virtual Com Labviewneto_e_khelenAinda não há avaliações
- 03 - Operadores Relacionais, Lógicos e Condicionais PDFDocumento19 páginas03 - Operadores Relacionais, Lógicos e Condicionais PDFLarissa PrutkiAinda não há avaliações
- Brousseau G. SlidesDocumento67 páginasBrousseau G. SlidesE_RCARVALHO100% (1)
- Componentes Do Tubo de Raios X - Fisica Da RadiologiaDocumento16 páginasComponentes Do Tubo de Raios X - Fisica Da RadiologiajacksongalvaoAinda não há avaliações
- Evangelhos Apócrifos - (A Sofia de Jesus Cristo)Documento9 páginasEvangelhos Apócrifos - (A Sofia de Jesus Cristo)Diego AntunesAinda não há avaliações
- Análise Real 1Documento45 páginasAnálise Real 1Valdirene M. FerreiraAinda não há avaliações
- Teste - MecânicaDocumento6 páginasTeste - MecânicaLuciana SilvaAinda não há avaliações
- Lista de Exercicios Energia LivreDocumento3 páginasLista de Exercicios Energia Livreclaudio0% (2)
- Apostila Natal Venda Além de Panetone-COMPLETADocumento9 páginasApostila Natal Venda Além de Panetone-COMPLETASamora Tooling Engineer88% (8)
- 6º Caderno de Matemátca - 7º AnoDocumento12 páginas6º Caderno de Matemátca - 7º AnoJacky Riquielme100% (1)
- Bioquímica EngAmb T2 Grupo 05 Prova 02Documento4 páginasBioquímica EngAmb T2 Grupo 05 Prova 02Lucas SantosAinda não há avaliações
- Memorial Descritivo AutomaçãoDocumento13 páginasMemorial Descritivo AutomaçãoregfsdgfAinda não há avaliações
- Atividade de Recuperação Paralela 3 AnoDocumento1 páginaAtividade de Recuperação Paralela 3 AnofelupealmeidqAinda não há avaliações
- Ebook Scrum ArretadoDocumento76 páginasEbook Scrum ArretadoRaimundo MoreiraAinda não há avaliações
- Dimensionamento de HelicesDocumento13 páginasDimensionamento de HelicesKamilla Friás100% (1)
- SO InformáticaDocumento39 páginasSO InformáticaDavi OliveiraAinda não há avaliações
- Aula 1 2 e 3 - Etiopatogênese Geral Das LesõesDocumento21 páginasAula 1 2 e 3 - Etiopatogênese Geral Das Lesõescamilla fAinda não há avaliações
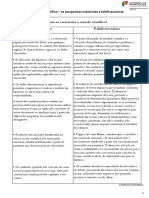
- O Metodo Cientifico Nas Perspetiva Indutivista e FalsificacionistaDocumento2 páginasO Metodo Cientifico Nas Perspetiva Indutivista e Falsificacionistalulu laranjeiraAinda não há avaliações
- Aula 02 - Estrutura Do Átomo e Isoátomos PDFDocumento9 páginasAula 02 - Estrutura Do Átomo e Isoátomos PDFitnerAinda não há avaliações
- Lista 2 GPEDocumento9 páginasLista 2 GPEHallex OwenAinda não há avaliações
- D2 Matemática SAEB - PENSE EXATODocumento43 páginasD2 Matemática SAEB - PENSE EXATOfbmendesAinda não há avaliações
- Fundamentos Da Higiene OcupacionalDocumento32 páginasFundamentos Da Higiene OcupacionaljheimissonAinda não há avaliações
- Prova PDFDocumento12 páginasProva PDFMaria MarizAinda não há avaliações
- Prova 7 º Ano Matematica Sme RJDocumento16 páginasProva 7 º Ano Matematica Sme RJVanessa GomesAinda não há avaliações
- Exemplo3.TCC AgrupamentoDocumento26 páginasExemplo3.TCC AgrupamentotalesfdsAinda não há avaliações
- Danfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Documento1 páginaDanfe Marcenarya Art Moveis Ltda: NF-e #000.000.330 Série 001Diego PedroAinda não há avaliações
- NBR Iec 60079-28Documento37 páginasNBR Iec 60079-28Lugo EngenhariaAinda não há avaliações