Você também pode gostar
- 2017 06 07 MotoresdeIndução PostDocumento44 páginas2017 06 07 MotoresdeIndução PostCaique EduardoAinda não há avaliações
- Circuito equivalente de motor de induçãoDocumento20 páginasCircuito equivalente de motor de induçãoEduardo Martins da SilvaAinda não há avaliações
- Aula16 Circuito Equivalente Motor InducaoDocumento29 páginasAula16 Circuito Equivalente Motor Inducaoplayercops36Ainda não há avaliações
- Aula 06 - Motores de Corrente ContínuaDocumento65 páginasAula 06 - Motores de Corrente ContínuaAna Laura CostaAinda não há avaliações
- Perdas e fluxo de potência em motores de induçãoDocumento4 páginasPerdas e fluxo de potência em motores de induçãoHeitor JuniorAinda não há avaliações
- Velocidade Angular Síncrona: Motor de InduçãoDocumento24 páginasVelocidade Angular Síncrona: Motor de InduçãoRhuan GamaAinda não há avaliações
- Motores de Indução Trifásicos: Partida e Circuito EquivalenteDocumento56 páginasMotores de Indução Trifásicos: Partida e Circuito Equivalentedriano22100% (1)
- Prova1 2020-1Documento2 páginasProva1 2020-1João PedroAinda não há avaliações
- Motores de Indução: Conceitos e Circuito EquivalenteDocumento25 páginasMotores de Indução: Conceitos e Circuito EquivalentePaulo Manuel Paulo PMAinda não há avaliações
- Aula 7 e 8 Teoria Maquinas Electricas I - ISPUNADocumento25 páginasAula 7 e 8 Teoria Maquinas Electricas I - ISPUNABlame PeterAinda não há avaliações
- Ficha 4Documento4 páginasFicha 4NobercioAinda não há avaliações
- Introdução às máquinas elétricas de corrente alternada e suas vantagensDocumento24 páginasIntrodução às máquinas elétricas de corrente alternada e suas vantagensMMazuc_OAinda não há avaliações
- Máquinas Elétricas - Lista de Exercícios de Motor de InduçãoDocumento11 páginasMáquinas Elétricas - Lista de Exercícios de Motor de InduçãoJohnantan SantosAinda não há avaliações
- Aula 04 - Motores de Indução MonofásicosDocumento39 páginasAula 04 - Motores de Indução MonofásicosAna Laura CostaAinda não há avaliações
- Aula03 MotoresElétricos COMELDocumento52 páginasAula03 MotoresElétricos COMELThiago Felipe NavarroAinda não há avaliações
- Maquina SincronaDocumento117 páginasMaquina SincronaThiago RodriguesAinda não há avaliações
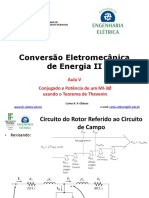
- Conjugado máximo de um motor de indução trifásicoDocumento21 páginasConjugado máximo de um motor de indução trifásicoCarlos OliboniAinda não há avaliações
- Aula 15-Introducao Aos Motores de Indução Trifasico-MITsDocumento22 páginasAula 15-Introducao Aos Motores de Indução Trifasico-MITsAlex MartinelliAinda não há avaliações
- Motores de relutância: funcionamento e aplicaçõesDocumento15 páginasMotores de relutância: funcionamento e aplicaçõesRui CarvalhoAinda não há avaliações
- AULA 1 - Princípios de Funcionamento Do Motor SíncronoDocumento42 páginasAULA 1 - Princípios de Funcionamento Do Motor SíncronoOrci AlbuquerqueAinda não há avaliações
- Aula 6 - Partida Estrela-TriânguloDocumento22 páginasAula 6 - Partida Estrela-TriânguloTiago GonçalvesAinda não há avaliações
- Partida e operação de motor síncronoDocumento4 páginasPartida e operação de motor síncronoWagner CunhaAinda não há avaliações
- CARACTERÍSTICAS Dos Motores CC - AULADocumento5 páginasCARACTERÍSTICAS Dos Motores CC - AULAGuilherme VascoAinda não há avaliações
- Ensaios de Motores de Indução TrifásicosDocumento7 páginasEnsaios de Motores de Indução TrifásicosRhuan GamaAinda não há avaliações
- Trabalho TomaziniDocumento16 páginasTrabalho TomaziniRafael BorgesAinda não há avaliações
- Ativ 6.1 - ExerAval05 - Pedro SilvérioDocumento4 páginasAtiv 6.1 - ExerAval05 - Pedro Silvérioadro.eng18Ainda não há avaliações
- Máquinas Elétricas: Motor de InduçãoDocumento132 páginasMáquinas Elétricas: Motor de InduçãoValescka RaysaAinda não há avaliações
- Aula7-Perdas MITDocumento15 páginasAula7-Perdas MITAmerco TivaneAinda não há avaliações
- Simulação MIT - MATLABDocumento14 páginasSimulação MIT - MATLABMarco Aurélio FrançaAinda não há avaliações
- Motor IndutivoDocumento21 páginasMotor IndutivoUilerAinda não há avaliações
- Motores 1Documento37 páginasMotores 1DLimports ImportsAinda não há avaliações
- 4.a Aula - N6CV2 - Circuito Elétrico Equivalente Do MITDocumento25 páginas4.a Aula - N6CV2 - Circuito Elétrico Equivalente Do MITTiago Michel HoffmannAinda não há avaliações
- Problemas sobre máquinas de induçãoDocumento59 páginasProblemas sobre máquinas de induçãoraquelbu3Ainda não há avaliações
- Geradores e Motores CC UFTMDocumento36 páginasGeradores e Motores CC UFTMMaruan Trítula Abdul KaderAinda não há avaliações
- Exercicios Resolvidos - MotoresDocumento15 páginasExercicios Resolvidos - MotoresMarcos Vieira100% (2)
- Circuito equivalente e análise de torque em motores de induçãoDocumento25 páginasCircuito equivalente e análise de torque em motores de induçãoOrci AlbuquerqueAinda não há avaliações
- Controle de velocidade em máquinas de induçãoDocumento42 páginasControle de velocidade em máquinas de induçãoSamuel MartinsAinda não há avaliações
- Exercício Baseado No "Problema 6.13" Do Livro Máquinas Elétricas - Stephen D. UmansDocumento1 páginaExercício Baseado No "Problema 6.13" Do Livro Máquinas Elétricas - Stephen D. UmansrenancoliderAinda não há avaliações
- Motores de InduçãoDocumento16 páginasMotores de InduçãoSérgio FerreiraAinda não há avaliações
- Análise da eficiência de um gerador composto curtoDocumento39 páginasAnálise da eficiência de um gerador composto curtoGilson JuniorAinda não há avaliações
- Prova4 2021-1 Reposicao MaquinasDocumento6 páginasProva4 2021-1 Reposicao MaquinasJoão PedroAinda não há avaliações
- Efeito da resistência do rotor no torque e correnteDocumento4 páginasEfeito da resistência do rotor no torque e correnteanajulia16Ainda não há avaliações
- Lista de Máquinas - ExercíciosDocumento2 páginasLista de Máquinas - Exercíciosmarciostudio!Ainda não há avaliações
- Aula 4 - Máquinas de Indução - Revisão Circuito Equivalente MI - ExercicioDocumento18 páginasAula 4 - Máquinas de Indução - Revisão Circuito Equivalente MI - ExercicioCarlos OliboniAinda não há avaliações
- Simulação dinâmica de motores CC série, excitação independente e shuntDocumento19 páginasSimulação dinâmica de motores CC série, excitação independente e shuntaugustoAinda não há avaliações
- 8 - Máquina de InduçãoDocumento98 páginas8 - Máquina de InduçãoSandro RobertoAinda não há avaliações
- Maquinas Indutivas ResumoDocumento7 páginasMaquinas Indutivas ResumoCaio FicheAinda não há avaliações
- Ação Estrela-Triângulo para Partida Suave de Motores TrifásicosDocumento17 páginasAção Estrela-Triângulo para Partida Suave de Motores TrifásicosJosé Mata IIIAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte IvNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte IvAinda não há avaliações
- Conversor cc-cc para aplicações veiculares: conversor cc-cc com características de tensão e corrente compatíveis com aplicações e veículos elétricosNo EverandConversor cc-cc para aplicações veiculares: conversor cc-cc com características de tensão e corrente compatíveis com aplicações e veículos elétricosAinda não há avaliações
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Aula 05 Introduà à o Ao Projeto de RDA RevdDocumento34 páginasAula 05 Introduà à o Ao Projeto de RDA RevdModestoAinda não há avaliações
- Phet Contribution 4450 7950Documento9 páginasPhet Contribution 4450 7950Maria ElianaAinda não há avaliações
- Eletric I DadeDocumento8 páginasEletric I DadeVera SaAinda não há avaliações
- Circuitos resistivos em série e paraleloDocumento5 páginasCircuitos resistivos em série e paraleloDanielly AzeredoAinda não há avaliações
- 3 Prova de Eletromagnetismo 2022Documento3 páginas3 Prova de Eletromagnetismo 2022ccnm - IFPE - Campus RecifeAinda não há avaliações
- Requisitos básicos de um sistema de aterramento elétricoDocumento12 páginasRequisitos básicos de um sistema de aterramento elétricodfrc01Ainda não há avaliações
- INSTRUMENTAÇÃODocumento49 páginasINSTRUMENTAÇÃOBrunoAinda não há avaliações
- Circuitos Eletricos - Curso LacrimosaDocumento36 páginasCircuitos Eletricos - Curso Lacrimosaluisthalis9Ainda não há avaliações
- Aula 02 - Condutores e IsolantesDocumento22 páginasAula 02 - Condutores e IsolantesYakusinhaAinda não há avaliações
- Norma Brasileira: Abnt NBR 17094-3Documento131 páginasNorma Brasileira: Abnt NBR 17094-3Diogenes CristoforoAinda não há avaliações
- Bioimpedancia ArduinoDocumento7 páginasBioimpedancia ArduinoIzaura HonoratoAinda não há avaliações
- Aula 16 - Oscilações MecânicasDocumento6 páginasAula 16 - Oscilações MecânicassereiamilenyengAinda não há avaliações
- Unidade 01 - Lei de Coulomb - Parte 01Documento5 páginasUnidade 01 - Lei de Coulomb - Parte 01Lenilson SantosAinda não há avaliações
- Aula 09 - Eletricidade I - CN 2024Documento71 páginasAula 09 - Eletricidade I - CN 2024aguiardani42Ainda não há avaliações
- 01-ELE033 Introducao Analise SEPDocumento48 páginas01-ELE033 Introducao Analise SEPLuiz Otávio GonçalvesAinda não há avaliações
- Manual Disjuntor Aberto Soprano SE05Documento20 páginasManual Disjuntor Aberto Soprano SE05jefson ricardo centenaAinda não há avaliações
- Lista 1 - SolucionárioDocumento6 páginasLista 1 - SolucionárioRicardo AmorimAinda não há avaliações
- Lista de Eletrostática - 3 ° AnoDocumento4 páginasLista de Eletrostática - 3 ° Anohesthefany.lino18Ainda não há avaliações
- Eletrostatica - Larissa Gomes Ferreira Da SilvaDocumento11 páginasEletrostatica - Larissa Gomes Ferreira Da SilvaLarissa Gomes Ferreira da SilvaAinda não há avaliações
- Na08 (MLima) Ondas Otica F Moderna PDFDocumento138 páginasNa08 (MLima) Ondas Otica F Moderna PDFDaniel Siqueira CoelhoAinda não há avaliações
- Questões Projeto Instalações Elétricas 2Documento7 páginasQuestões Projeto Instalações Elétricas 2mb7t4v9nmxAinda não há avaliações
- Sistema de Aterramento Gab-Rme-160-013-EDocumento22 páginasSistema de Aterramento Gab-Rme-160-013-EOsvaldo Junges BomfimAinda não há avaliações
- Eletricidade EstáticaDocumento2 páginasEletricidade Estáticagaby munzAinda não há avaliações
- RevisaoDocumento2 páginasRevisaoKelitonAinda não há avaliações
- Trabalho Prático 4: Apresentação e Análise de ResultadosDocumento7 páginasTrabalho Prático 4: Apresentação e Análise de ResultadosPedro NevesAinda não há avaliações
- Amplificador de Áudio Usando Transistor BipolarDocumento21 páginasAmplificador de Áudio Usando Transistor BipolarPaulo D.Ainda não há avaliações
- Projeto Uso de Energia No Meio Rural (Final)Documento8 páginasProjeto Uso de Energia No Meio Rural (Final)Ruan Vitor Cortelassi da CruzAinda não há avaliações
- Instalações Elétricas Moradia TonelaDocumento47 páginasInstalações Elétricas Moradia TonelaSantos MatsinheAinda não há avaliações
- Eletromagnetismo BásicoDocumento28 páginasEletromagnetismo BásicoDouglasAinda não há avaliações
- 44316-Exercícios para Eletricidade BásicaDocumento3 páginas44316-Exercícios para Eletricidade BásicaPaulo Jardel Freitas OliveiraAinda não há avaliações