Você também pode gostar
- Organize-se para o sucessoDocumento32 páginasOrganize-se para o sucessoTalesMoreiradeCarvalho100% (2)
- Jim Kwik, especialista em aprendizagemDocumento9 páginasJim Kwik, especialista em aprendizagemElder Da Silva Andrade100% (2)
- Asterisk AvancadoDocumento34 páginasAsterisk AvancadoEduardo Pereira da SilvaAinda não há avaliações
- Lógica Programação ApostilaDocumento72 páginasLógica Programação ApostilaTamily JacquesAinda não há avaliações
- Caderno CESPEDocumento219 páginasCaderno CESPEMaria Joselita De Sousa100% (3)
- Processos Estocásticos I - Cadeias de Markov e Exercícios ResolvidosDocumento17 páginasProcessos Estocásticos I - Cadeias de Markov e Exercícios ResolvidosDiego HernandezAinda não há avaliações
- Pólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosDocumento29 páginasPólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosLameseMecatronicaAinda não há avaliações
- 12 - Regulador-Controle Por Realimentação Dos EstadosDocumento16 páginas12 - Regulador-Controle Por Realimentação Dos EstadosRichard de BemAinda não há avaliações
- Lista 2Documento12 páginasLista 2ubbi_wanAinda não há avaliações
- Aula 07 - Observador - Ordem - PlenaDocumento33 páginasAula 07 - Observador - Ordem - PlenaVictor EduardoAinda não há avaliações
- Lista 1Documento10 páginasLista 1Davi JordãoAinda não há avaliações
- Lab CDin 2Documento6 páginasLab CDin 2Rafael VenturaAinda não há avaliações
- Prova1 SOLUCAO Gaal 2013 1s PDFDocumento6 páginasProva1 SOLUCAO Gaal 2013 1s PDFDaniel KozakevichAinda não há avaliações
- Pólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosDocumento29 páginasPólos, Zeros e Estabilidade: Análise de Sistemas DinâmicosamadeusvcAinda não há avaliações
- Cap3 LaplaceDocumento32 páginasCap3 LaplaceGabriel MazzoniAinda não há avaliações
- Controle e Observabilidade de Sistemas DinâmicosDocumento10 páginasControle e Observabilidade de Sistemas DinâmicosDeborah S. FructuosoAinda não há avaliações
- Relatório Laboratório de Sistemas de Controle de EstabilidadeDocumento20 páginasRelatório Laboratório de Sistemas de Controle de EstabilidadeingrindieAinda não há avaliações
- DSL 20201 L2Documento3 páginasDSL 20201 L2Mariana MoreiraAinda não há avaliações
- PROJETO CONTROLADOR PID CONTROLE ATITUDE CUBESAT 1UDocumento27 páginasPROJETO CONTROLADOR PID CONTROLE ATITUDE CUBESAT 1UVagner CostaAinda não há avaliações
- Cadeias de Markov PDFDocumento13 páginasCadeias de Markov PDFFernanda AzevedoAinda não há avaliações
- Teoria de Controle - Avaliação ParcialDocumento9 páginasTeoria de Controle - Avaliação ParcialCarlos Alexandre MouraAinda não há avaliações
- Solução P1 2020Documento10 páginasSolução P1 2020Lucas MorthAinda não há avaliações
- 2016.06.14 [Rep] - enunciado + soluçãoDocumento3 páginas2016.06.14 [Rep] - enunciado + soluçãobrunocor49Ainda não há avaliações
- Apostila 3 Prova PDFDocumento63 páginasApostila 3 Prova PDFNelson JuniorAinda não há avaliações
- 10-Realimentação de EstadosDocumento88 páginas10-Realimentação de EstadosDavid de Almeida FiorilloAinda não há avaliações
- Prova 1 SCI 2021 1SDocumento7 páginasProva 1 SCI 2021 1SROBERTH HENRIQUE GUIMARAES DOS SANTOSAinda não há avaliações
- Controle de Sistemas Mecânicos por Realimentação de EstadosDocumento4 páginasControle de Sistemas Mecânicos por Realimentação de EstadosPedroLemosAinda não há avaliações
- p1 Controle AulasDocumento135 páginasp1 Controle AulasjoaoreniAinda não há avaliações
- Criterio de Estabilidade de Routh-Hurwitz - RefDocumento13 páginasCriterio de Estabilidade de Routh-Hurwitz - RefGabriel AlbuquerqueAinda não há avaliações
- Lista1 (1)Documento7 páginasLista1 (1)Tiago Rodrigues MendonçaAinda não há avaliações
- 09 Lugar Das Raízes 01Documento4 páginas09 Lugar Das Raízes 01Arthur LealAinda não há avaliações
- Av3 2020 2Documento2 páginasAv3 2020 2Bio HueAinda não há avaliações
- Modelos de Sistemas de Segunda Ordem PDFDocumento22 páginasModelos de Sistemas de Segunda Ordem PDFRobson Da SilvaAinda não há avaliações
- Modelagem matemática de sistemas de controleDocumento28 páginasModelagem matemática de sistemas de controleHenrique LimaAinda não há avaliações
- Sistemas lineares homogêneos e balanceamento de reaçõesDocumento7 páginasSistemas lineares homogêneos e balanceamento de reaçõesBarral InsuportavelAinda não há avaliações
- Tutorial Python MECBDocumento23 páginasTutorial Python MECBRobson CarlosAinda não há avaliações
- EELi03 T01 Experimento 2Documento5 páginasEELi03 T01 Experimento 2João VitorAinda não há avaliações
- Roteiro 3Documento13 páginasRoteiro 3luis volpeAinda não há avaliações
- Controle e Observação em Sistemas DinâmicosDocumento4 páginasControle e Observação em Sistemas DinâmicosAntonio BatistaAinda não há avaliações
- Trabalho 02 - Fundamentos de Sistemas Elétricos de PotênciaDocumento6 páginasTrabalho 02 - Fundamentos de Sistemas Elétricos de PotênciaAnaAinda não há avaliações
- Trabalho 3 Controle IIDocumento16 páginasTrabalho 3 Controle IIlucasalexandreAinda não há avaliações
- Exercício8 Lista 2Documento1 páginaExercício8 Lista 2lucelina_bsAinda não há avaliações
- PROVA P1_CET0160_HIPER_2016_1_ResDocumento25 páginasPROVA P1_CET0160_HIPER_2016_1_ResSebastião SimãoAinda não há avaliações
- Aula 5-Controlabilidade e ObservabilidadeDocumento19 páginasAula 5-Controlabilidade e ObservabilidadeAjofre CompanhiaAinda não há avaliações
- Aula6 - Sistemas LinearesDocumento12 páginasAula6 - Sistemas LinearesElder GuedesAinda não há avaliações
- Controle Automático II - Resposta a degrau unitário de servo sistema de 3a ordemDocumento5 páginasControle Automático II - Resposta a degrau unitário de servo sistema de 3a ordemNota Joao TemboAinda não há avaliações
- Funções Lógicas e Equivalência de PortasDocumento5 páginasFunções Lógicas e Equivalência de PortasGabriel NazarioAinda não há avaliações
- Lista de exercícios de controle de sistemas dinâmicosDocumento2 páginasLista de exercícios de controle de sistemas dinâmicosEvander SarraffAinda não há avaliações
- Sistemas Dinâmicos - Provas de Controle e ObservabilidadeDocumento2 páginasSistemas Dinâmicos - Provas de Controle e ObservabilidadeRobinson Imaiti MashibaAinda não há avaliações
- Bizu de Sistemas LinearesDocumento7 páginasBizu de Sistemas LinearesD03925Ainda não há avaliações
- Lista de Exercícios Aulas 4 e 5 6Documento4 páginasLista de Exercícios Aulas 4 e 5 6Luis Henrique FiorotiAinda não há avaliações
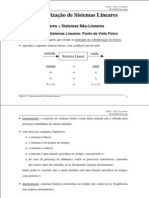
- Análise de sistemas não-lineares via aproximações linearesDocumento29 páginasAnálise de sistemas não-lineares via aproximações linearesElaineAmaralAinda não há avaliações
- Como É o Método de GaussDocumento2 páginasComo É o Método de GaussBernardo LouzadaAinda não há avaliações
- Controle Automático: Aula 2 - 1Documento64 páginasControle Automático: Aula 2 - 1Leo WilliamAinda não há avaliações
- Análise de Estabilidade em Sistemas DiscretosDocumento19 páginasAnálise de Estabilidade em Sistemas DiscretosJoseilton SouzaAinda não há avaliações
- Análise de Controlabilidade e Observabilidade de Um Motor DC No Espaço de EstadosDocumento3 páginasAnálise de Controlabilidade e Observabilidade de Um Motor DC No Espaço de EstadosJunior PletschAinda não há avaliações
- Exemplos resolvidos no MATLAB de sistemas mecânicosDocumento31 páginasExemplos resolvidos no MATLAB de sistemas mecânicosVitor NazárioAinda não há avaliações
- Exp 9 LGR 1Documento4 páginasExp 9 LGR 1Mk DuarteAinda não há avaliações
- Prova - ServomecanismoDocumento7 páginasProva - ServomecanismoCamila Marques CoutoAinda não há avaliações
- Controle e Automação I - Lista de Exercícios (PMR-2360Documento8 páginasControle e Automação I - Lista de Exercícios (PMR-2360rogerio nascimentoAinda não há avaliações
- 3 - Laboratório Técnica Lugar Das RaízesDocumento10 páginas3 - Laboratório Técnica Lugar Das RaízesmarcelAinda não há avaliações
- Sistemas Lineares Aula 03Documento29 páginasSistemas Lineares Aula 03Emilly DaianyAinda não há avaliações
- 5 EXERCÍCIOS DE CONTROLEDocumento15 páginas5 EXERCÍCIOS DE CONTROLERaquel Bezerra SAinda não há avaliações
- Gabarito Lista de Controle Resolvida PDFDocumento10 páginasGabarito Lista de Controle Resolvida PDFRafaella B. C. RafaAinda não há avaliações
- Atividade 3 LabDocumento5 páginasAtividade 3 LabVictor EduardoAinda não há avaliações
- Atividade 4 LabDocumento5 páginasAtividade 4 LabVictor EduardoAinda não há avaliações
- Atividade 2 LabDocumento6 páginasAtividade 2 LabVictor EduardoAinda não há avaliações
- Aula 8Documento35 páginasAula 8Gabriel NascimentoAinda não há avaliações
- Controle de sistemas: erros em regime permanenteDocumento43 páginasControle de sistemas: erros em regime permanenteVictor EduardoAinda não há avaliações
- Sistemas Inteligentes: Relações FuzzyDocumento25 páginasSistemas Inteligentes: Relações FuzzyVictor EduardoAinda não há avaliações
- IHC Atividades avaliação heurística login livraria UTFPR portalDocumento12 páginasIHC Atividades avaliação heurística login livraria UTFPR portalVictor EduardoAinda não há avaliações
- Aula 05 - Princípios de Design - Atividades - EC37BDocumento37 páginasAula 05 - Princípios de Design - Atividades - EC37BVictor EduardoAinda não há avaliações
- Robôs humanoides: evolução e aplicaçõesDocumento3 páginasRobôs humanoides: evolução e aplicaçõesVictor EduardoAinda não há avaliações
- Aula 04 - Metáforas e Estilos de Interação - AtividadesDocumento14 páginasAula 04 - Metáforas e Estilos de Interação - AtividadesVictor EduardoAinda não há avaliações
- IHC atividades introdutóriasDocumento12 páginasIHC atividades introdutóriasVictor EduardoAinda não há avaliações
- 9329 PDFDocumento20 páginas9329 PDFandre mauroAinda não há avaliações
- Registro Empresa WORLD TECNOLOGIADocumento5 páginasRegistro Empresa WORLD TECNOLOGIAjaimeAinda não há avaliações
- G24126RMDocumento23 páginasG24126RMElvisRodriguesAinda não há avaliações
- Gestão Da Manutenção - Fabiano Souza de OliveiraDocumento4 páginasGestão Da Manutenção - Fabiano Souza de Oliveiraartefatos de borrachaAinda não há avaliações
- Eletrônica Embarcada - Atividade 9Documento6 páginasEletrônica Embarcada - Atividade 9gabrielAinda não há avaliações
- Apresentação TambasaDocumento31 páginasApresentação TambasaamandafidelipAinda não há avaliações
- Programação Orientada a Objetos - Lista 3 JavaDocumento2 páginasProgramação Orientada a Objetos - Lista 3 JavaCamillaFonsecaAinda não há avaliações
- Reta Final PC AM Noções de Administração Prof Stefan FantiniDocumento126 páginasReta Final PC AM Noções de Administração Prof Stefan FantinimayklucaAinda não há avaliações
- Reconfigurando impressora na rede após alteraçõesDocumento7 páginasReconfigurando impressora na rede após alteraçõesKellio Passos StorchAinda não há avaliações
- Previdia Max - Manual de Configuração, Colocação em Serviço e Manutenção - 150Documento20 páginasPrevidia Max - Manual de Configuração, Colocação em Serviço e Manutenção - 150Tiago SantosAinda não há avaliações
- Plano de EnsinoDocumento2 páginasPlano de EnsinoFlávio BassoAinda não há avaliações
- Manual 60.03.02.251-r1 Color - A4Documento40 páginasManual 60.03.02.251-r1 Color - A4Reni Rodrigo de CastroAinda não há avaliações
- Assistente Administrativo FICDocumento15 páginasAssistente Administrativo FICDrCarlos CunhaAinda não há avaliações
- AP Sistemas de Informao Gerencial Nota 100Documento8 páginasAP Sistemas de Informao Gerencial Nota 100SilvanoAinda não há avaliações
- Tutorial Notbook ItautecDocumento7 páginasTutorial Notbook Itautecanelia nevesAinda não há avaliações
- DPS proteção contra surtosDocumento2 páginasDPS proteção contra surtosDave OliveiraAinda não há avaliações
- Introdução - Estudo e Análise de Desempenho de Algoritmos para Elevadores InteligentesDocumento4 páginasIntrodução - Estudo e Análise de Desempenho de Algoritmos para Elevadores Inteligentesthatazinha86Ainda não há avaliações
- Manual Da HDL StsDocumento76 páginasManual Da HDL StsWelington Dos Santos RamalhoAinda não há avaliações
- Tecnologias da Informação e Comunicação no 8o anoDocumento17 páginasTecnologias da Informação e Comunicação no 8o anoOlga FreitasAinda não há avaliações
- CESAR School NEXT 2022.1 - Material CompletoDocumento34 páginasCESAR School NEXT 2022.1 - Material CompletoManoel GeraldoAinda não há avaliações
- Ficha BarbaraDocumento2 páginasFicha BarbaraDigg oooAinda não há avaliações
- Servo-motores em animatrônicaDocumento3 páginasServo-motores em animatrônicaGalahad666Ainda não há avaliações
- Modelagem ER - Banco de DadosDocumento27 páginasModelagem ER - Banco de DadosnavAinda não há avaliações
- Introdução A Redes de Computadores e Histórico Da InternetDocumento35 páginasIntrodução A Redes de Computadores e Histórico Da InternetFilipe RosaAinda não há avaliações
- Atividades de Ortografia Com As Letras LH e LiDocumento36 páginasAtividades de Ortografia Com As Letras LH e Liludimilla.reisAinda não há avaliações





















![2016.06.14 [Rep] - enunciado + solução](https://imgv2-1-f.scribdassets.com/img/document/720509354/149x198/c008c0add4/1712380503?v=1)