Escolar Documentos
Profissional Documentos
Cultura Documentos
Projecto de Accionamento de Uma Betoneira Industria1
Enviado por
Julio joaquim tembisseTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Projecto de Accionamento de Uma Betoneira Industria1
Enviado por
Julio joaquim tembisseDireitos autorais:
Formatos disponíveis
UNIVERSIDADE EDUARDO MONDLANE
FACULDADE DE ENGENHARIA
DEPARTAMENTO DE ENGENHARIA MECÂNICA
PROJECTO MECÂNICO
ACCIONAMENTO DE UMA BETONEIRA INDUSTRIAL
DISCENTE: DOCENTES:
TIVANE, Marcos Arnaldo Prof. Doutor. Engo Rui Vasco Sitoe
Doutor Engo Pedro António Ah Shenga
Engº Mocomoque Júlio
Maputo, Agosto de 2018
Projecto de accionamento de uma betoneira industrial 2018
Índice
Lista de figuras.............................................................................................................................................ii
Lista de tabelas...........................................................................................................................................iii
Tarefa..........................................................................................................................................................iv
1. Introdução...........................................................................................................................................1
2. OBJECTIVOS.........................................................................................................................................2
2.1. OBJECTIVO GERAL........................................................................................................................2
2.2. OBJECTIVOS ESPECÍFICOS............................................................................................................2
3. METODOLOGIA USADA........................................................................................................................2
4. DESTINO E CAMPO DE APLICAÇÃO DO ACCIONAMENTO....................................................................1
5. CÁLCULO CINEMÁTICO DO ACCIONAMENTO E ESCOLHA DO MOTOR ELÉCTRICO..............................1
5.1. Determinação da potência sobre o veio do órgão executivo.......................................................1
5.2. Determinação do rendimento geral do accionamento................................................................1
5.3. Cálculo da potência do motor eléctrico.......................................................................................2
5.4. Escolha dos parâmetros do motor eléctrico................................................................................2
5.5. Cálculo da relação de transmissão geral......................................................................................2
5.6. Cálculo das frequências de rotação dos veios..............................................................................4
5.7. Cálculo das potências dos veios...................................................................................................5
5.8. Cálculo do torque nos veios.........................................................................................................5
MARCOS ARNALDO TIVANE Pá gina i
Projecto de accionamento de uma betoneira industrial 2018
Lista de figuras
Figura 1. Esquema cinemático....................................................................................................................iv
Figura 2. ciclograma de carregamento........................................................................................................v
MARCOS ARNALDO TIVANE Pá gina ii
Projecto de accionamento de uma betoneira industrial 2018
Lista de tabelas
Tabela 1. Dados do problema ………………………………………………………………………………………………….IV
Tabela 2. Característica dos motores eléctricos………………………………………………………………………..2
Tabela 3. Primeira tentativa ………………………..................................…………………………………………... 3
Tabela 4. Segunda tentativa …………………………………………………………………………………………………… 4
Tabela 5. Características do motor escolhido…………………………………………..………….……………………4
Tabela 6. Resultados do cálculo cinemático do accionamento ……………………………………………….. 6
MARCOS ARNALDO TIVANE Pá gina iii
Projecto de accionamento de uma betoneira industrial 2018
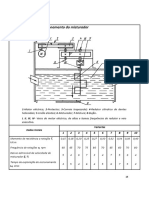
Enunciado da tarefa técnica
Uma betoneira industrial para misturar cimento, areia, pedra e água funciona usando os
parâmetros dados na tabela abaixo. A carga tem baixo grau de dinamismo mas usa-se água e os
produtos são altamente abrasivos e também são corrosivos. Desenhar o esquema cinemático e
projectar o respectivo accionamento.
Dados
Tabela 1. Dados do problema
Variante Tipo de Frequê Massa da Excent Kdia Kano Vida Kd Diagrama de
redutor, ncia de mistura ricidad útil, L carregamento
transmissão rotação (Kg) e (m) (anos)
Bi-
escalonar,
25 ECDA 7 8500 0.55 0.25 0.66 8 1.3 3
Esquema cinemático
Legenda
a. Motor eléctrico
b. Ligação elástica
c. Corpo do redutor com ECDA
d. Betoneira
e. Rolos
1…5. Veios
Figura 1. Esquema cinemático
MARCOS ARNALDO TIVANE Pá gina iv
Projecto de accionamento de uma betoneira industrial 2018
Ciclograma de carregamento
Figura 2. Ciclograma de carregamento
O tempo de trabalho do mecanismo durante o período de vida útil em anos é dado por:
Σt=365×24×K dia×K ano×L
Σt=365×24×0 .25×0 . 66×8
Σt=11563 Horas
MARCOS ARNALDO TIVANE Pá gina v
Projecto de accionamento de uma betoneira industrial 2018
1. Introdução
No âmbito do plano curricular do curso de Engenharia Mecânica leccionado na Universidade
Eduardo Mondlane, em particular na Faculdade de Engenharia, tem-se a disciplina do
projecto mecânico que visa consolidar os conhecimentos adquiridos em diversas disciplinas
por meio da elaboração de um projecto.
Esta disciplina é precedida, por várias disciplinas como órgãos de máquinas, resistências dos
materiais, materiais entre outras.
Desde os tempos que se vão o homem tem notado a necessidade de inventar máquinas com
vista a reduzir o esforço humano e aumentar a produtividade, porém para este efeito é
indispensável a fase do projecto que consiste no cálculo cinemático, dimensionamento e
desenho da futura máquina.
No presente trabalho, tem-se por objectivo trazer de forma pormenorizada a sequência do
cálculo projectivo e o respectivo desenho de uma betoneira industrial.
Marcos Arnaldo Tivane Pá gina 1
Projecto de accionamento de uma betoneira industrial 2018
2. OBJECTIVOS
2.1. OBJECTIVO GERAL
Consolidar os conhecimentos sobre os elementos constituintes de máquinas, permitindo que
o estudante tenha uma visão mais ampla sobre a essência da construção de máquinas.
2.2. OBJECTIVOS ESPECÍFICOS
O presente projecto têm como objectivo idealizar e dimensionar um accionamento de uma
betoneira industrial através de um motor eléctrico, destinada a misturar água, cimento, pedras
e areia usados na construção civil.
3. METODOLOGIA USADA
A fim de elaborar o presente trabalho a metodologia usada consiste primeiramente no cálculo
cinemático do accionamento com vista a escolher o motor eléctrico adequado com base nos
parâmetros cinemáticos do órgão executivo, considerando o redutor como um elemento
reduzido simples e com uma relação de transmissão geral. Em seguida, faz-se a partição da
relação de transmissão através dos escalões do redutor e a transmissão por engrenagem
cilíndrica de dentes rectos adicionada para efeitos construtivos.
A posterior, segue-se com o cálculo cinemático de modo a obter-se os parâmetros de entrada
do redutor e em seguida fazer-se o cálculo projectivo deste, que consiste no cálculo
projectivo das engrenagens, cálculo dos veios, escolha dos rolamentos e verificação da sua
resistência, chavetas e esboço do corpo redutor. O cálculo é considerado concluído após a
verificação da resistência de todos os órgãos do corpo redutor que necessitam do teste da sua
resistência de acordo com a maneira em que são carregados.
De salientar que este processo é feito de maneira iterativa pois, pode-se dar o caso de os
órgãos previamente escolhidos não resistam à solicitação em que são submetidos.
Marcos Arnaldo Tivane Pá gina 2
Projecto de accionamento de uma betoneira industrial 2018
4. DESTINO E CAMPO DE APLICAÇÃO DO ACCIONAMENTO
Uma betoneira ou misturador de concreto é o equipamento utilizado para mistura de materiais,
na qual se adicionam cargas de pedra, areia, cimento e água, na proporção e textura devida, de
acordo com o tipo de massa (concreto) desejada para efeitos de construção civil.
É muito usada na construção civil, principalmente para mistura de agregados como produtos e
materiais primas a exemplo na construção de barragens e açudes utilizando-se o concreto na
mistura de argamassa.
5. CÁLCULO CINEMÁTICO DO ACCIONAMENTO E ESCOLHA DO MOTOR
ELÉCTRICO
5.1. Determinação da potência sobre o veio do órgão executivo
P6=V × ρ× g × b ×ω 0 × K S , Sendo que : ρ ×V =m, então a potência calcula-se pela expressão:
P6=m× g × b× ω 0 × K s=8500 × 9.81× 0.55 ×0.732667 ×1.2
P6=40.3 kW
Onde:
2 π×n said
ωo é a frequência angular do veio executivo: ωo= =0 . 732667 s−1
60
V- é o volume ocupado pela massa, m;
m- é a massa,
ρ-massa especifica,
g- aceleração de gravidade que é igual a 9.81 m/s2
b- é a excentricidade em metros
Ks- é o coeficiente de segurança (1.0…1.2)
P- é a potência em kW
n- numero de rotações em rpm
Marcos Arnaldo Tivane Pá gina 1
Projecto de accionamento de uma betoneira industrial 2018
5.2. Determinação do rendimento geral do accionamento
O rendimento geral do accionamento é dado por:
η g=η2red × ηelast × ηECDR × η4rolam × η4rolo
2 4 4
η g=0.99 ×0.995 × 0.95× 0.99 × 0.98
η g=0.817 ⇒ ηg=0.817 ×100 %=81.7
ηg- rendimento mecânico geral/global do accionamento,
ηg
- rendimento mecânico do redutor
η ECDR
- rendimento mecânico na engrenagem cilíndrica de dentes rectos
ηrol
- rendimento mecânico no rolamento
5.3. Cálculo da potência do motor eléctrico
A potência do motor eléctrico é determinada, segundo a metodologia usada no presente trabalho,
como função da potência do veio executivo do accionamento, e o rendimento geral através da
expressão abaixo:
P6 40.3
Pcalc = = =49.4 KW
P g 0.817
Tendo em conta a potência calculada de Pcal =49.4 KW , a potência mais próxima é de P=55
KW portanto procede-se com a escolha dos parâmetros do motor eléctrico.
5.4. Escolha dos parâmetros do motor eléctrico
Da tabela 8 retiram-se os seguintes motores eléctricos com os seguintes parâmetros apresentados
na tabela abaixo.
Tabela 2. Característica dos motores eléctricos
Variant Designação do Potência nominal Frequência de rotação rpm
e motor [KW] Síncrona ηsinc Assíncrona ηassinc
1 4A225M2Y3 55 3000 2945
2 4A225M4Y3 55 1500 1480
Marcos Arnaldo Tivane Pá gina 2
Projecto de accionamento de uma betoneira industrial 2018
3 4A250M6Y3 55 1000 985
4 4A280S8Y3 55 750 735
5.5. Cálculo da relação de transmissão geral
Tendo a posse das características dos motores eléctricos para cada variante calculam-se as
relações de transmissão gerais através da relação:
ni
U gi =
ni
Portanto para cada uma das variantes dos motores eléctricos tem-se:
n1 2945
U g 1= = =420.7
nt 7
n2 1480
U g 2= = =211.4
nt 7
n3 985
U g 3= = =140.7
nt 7
n 4 735
U g 4= = =105.0
nt 7
De seguida faz-se a escolha das relações de transmissão para todas as transmissões á partir das
recomendações dadas na tabela 11 (pág.20) [1], no qual o produto de todas as relações de
transmissão devem ser aproximadas as relações de transmissão geral anteriormente calculadas.
Para o presente caso, tem-se Ured (7.1…50) para dois escalões, e no caso da transmissão cilíndrica
de dentes rectos UECDR ((3) 4…8) e um valor máximo de 16 da tabela 12 (pág. 21).
Portanto para a escolha do motor eléctrico adequado seguem-se as tentativas abaixo:
Primeira tentativa
Tabela 3. Primeira tentativa
Variante
Designação
1 2 3 4
Relação de transmissão geral 420.7 211.4 140.7 105.0
Relação de transmissão do redutor 10 10 10 10
Relação de transmissão na aberta (ECDR) 42.1 21.1 14.1 10.5
Marcos Arnaldo Tivane Pá gina 3
Projecto de accionamento de uma betoneira industrial 2018
Analisando os valores obtidos na tabela, observa-se que a relação de transmissão da engrenagem
cilíndrica de dentes rectos esta fora dos limites e portanto são eliminados e fica-se com as duas
últimas.
Segunda tentativa
Tabela 4. Segunda tentativa
Variante
Designação
1 2 3 4
Relação de transmissão geral 420.7 211.4 140.7 105.0
Relação de transmissão do redutor 11.2 11.2 11.2 11.2
Relação de transmissão na aberta (ECDR) 37.6 18.9 12.6 9.4
Analisando os valores obtidos nota-se que os valores da relação de transmissão duas primeiras
variantes ainda esta fora dos limites para ECDR mesmo com o aumento da relação de
transmissão do redutor.
Terceira tentativa
Tabela 5. Terceira tentativa
Variante
Designacao
1 2 3 4
R.T geral 420.7 211.4 140.7 105.0
R.T T. redutor 12.5 12.5 12.5 12.5
R.TT. ENG 33.7 16.9 11.3 8.4
Das tentativas acima realizadas a melhor é a quarta variante, porém este motor é caro e as
relações de transmissão não parecem satisfazer aquilo que são as características da construção,
portanto para este caso escolhe-se a terceira variante pois o ideal aqui é ter uma relação de
transmissão relativamente maior na ECDR pois na roda movida estará acoplado o tambor da
betoneira, porem busca-se fazer ao mesmo tempo um redutor compacto.
Tabela 6. Características do motor escolhido
Marcos Arnaldo Tivane Pá gina 4
Projecto de accionamento de uma betoneira industrial 2018
Para a potência nominal Diâmetro
Frequênci do veio de
Potencia, a nominal
Rendimento Factor de
mecânico, potência,
T arr T min T max saída do
Pm n η cosϕ motor
Tipo de
motor [kW] [rpm] [%] [-]
T nom T nom T nom [mm]
Frequência de rotação síncrona
A4250M6Y3 55.0 985 91.5 0.89 1.2 1.0 2.1 75
5.6. Cálculo das frequências de rotação dos veios
Veio -1: n1 =nassinc =985 rpm
Veio-2: n2 =n1=985 rpm
n2 985
Veio-3 n3 = = =312.7 rpm
U 1 , escalao 3.15
n3 312.7
Veio-4: n 4= = =78.2 rpm
U 2 escalao 4
Veio-5: n5 =n4 =78.2 rpm
n5
Veio-6: n6 = =7 rpm
ηECDR
5.7. Cálculo das potências dos veios
P1=P me=49 .4 kW
P2 =P 1×ηelast ×η rolament =49 . 4×0. 99×0 . 995=48 . 6 kW
P3 =P2×η ECDA×η rolament =48 . 6×0. 99×0. 99=47 .7 kW
P4 =P3 ×η ECDA ×ηrolam =47 . 7×0 .99×0 . 99=46 .7 kW
P5=P 4 × ηrolam × ηelast =46.7 ×0.99 ×0.995=46 KW
P6=P5 × ηECDR × η4rolo=46.7× 0.99 ×0.995=42 KW
Marcos Arnaldo Tivane Pá gina 5
Projecto de accionamento de uma betoneira industrial 2018
5.8. Cálculo do torque nos veios
Pi
T i =9550
ni N.m
P1
i 49. 4
T 1 =9550 =9550 =478 .7
n1 985 N.m
P2
i 48. 6
T 2=9550 =9550 =471. 5
n2 985 N.m
P3
i 47 .7
T 3 =9550 =9550 =1455 . 7
n3 312 . 7 N.m
P4
i 46 . 7
T 4 =9550 =9550 =5706 . 8
n4 78. 2 N.m
P5 46
T 5=9550 × =9550 × =5621.4 Nm
n5 78.2
P6 42
T 6=9550 × =9550 × =57785.1 Nm
n6 7
Os resultados do cálculo cinemático do accionamento encontram-se na tabela abaixo:
Marcos Arnaldo Tivane Pá gina 6
Projecto de accionamento de uma betoneira industrial 2018
Tabela 7. Resultados do cálculo cinemático do accionamento
Tipo de motor: A4250M6Y3, potencia: 55 kW, frequência nominal:985 rpm
Parâmetro Veio Formula Valores
1. Motor eléctrico Pme=P1 49.4
2. Movido T.
engrenagem P2 =P 1×ηelast ×η rolament 48.6
3. Movido T.
Potencia, engrenagem P3 =P2×η ECDA×η rolament 47.7
kW
4. Movido T. ECDR P4 =P3×η ECDA ×ηrolam 46.7
P5=P 4 × ηrolam × ηelast
5. ECDR 46
4
P6=P5 × ηECDR × η rolo
6. Tambor 42
1. Motor eléctrico nme=n1 985
2. Movido T.
engrenagem n2 =n1 985
n2
3. Movido T. n3 =
engrenagem U 1escalao 312.7
Frequênci
n3
a de n4=
rotação, n U 2 escalao
[rpm] 4. Tambor 78.2
n5 =n4
5. 78.2
n5
n6 =
ηECDR
6. 7
Momento P1
torsor, T T 1=9550 ∙
1. Motor eléctrico n1 478.7
[N.m]
2. Movido T.
P2
T 2=9550 ∙
engrenagem n2 471.5
3. Movido T.
P3
T 3=9550 ∙
engrenagem n3 1455.7
P4
T 4=9550∙
4. Tambor n4 5706.8
P5 5621.4
T 5=9550 ×
n5
Marcos Arnaldo Tivane Pá gina 7
Projecto de accionamento de uma betoneira industrial 2018
P6
T 6=9550 ×
n6
57785.1
5. CÁLCULO DE ENGRENAGEM
5.1. Dimensionamento do primeiro escalão
Tabela 8. Tipo do material escolhido
i Roda Material HB i [MPa ] σ r [MPa] σ e [ MPa] T . Térmico
1 Motriz Aço 40X 283 932 687 Melhoramento
2 Movida aço 45 263 834 569 Normalizacao
5.1.1. Determinação das tensões admissíveis por contacto
Determinam-se as tensõ es admissíveis "[σ ¿¿ HC ], em MPa ¿ " segundo o procedimento do
capítulo 2 de {3} (pá g. 10).
σ Hlim × Z R × Z V × K L × K xH
σ HC =
SH
Onde:
σ Hlim −¿ limite de fadiga por contacto das superfícies dos dentes correspondente ao número
equivalente de ciclos de variação das tensões, em Mpa ;
Z R−¿ coeficiente que leva em conta a rugosidade das superfícies dos dentes conjugados;
Z v −¿ coeficiente que leva em conta a velocidade circular ou tangencial;
K L−¿ coeficiente que leva em conta a lubrificação;
K xH −¿ coeficiente que leva em conta as dimensões da roda dentada;
S H −¿ coeficiente de segurança.
Previamente arbitra-se o produto: ZR× Zv × KL× KxH =0,9.
Da página 17, tem-se:
σ Hlimb 1=2 ∙ HB1 +70=2∙ 283+70=636 MPa
σ Hlimb 2=2 ∙ HB2 +70=2∙ 263+70=596 MPa
Marcos Arnaldo Tivane Pá gina 8
Projecto de accionamento de uma betoneira industrial 2018
Da página 20, tem-se:
2,4 7 6
N HO 1=30 ∙ HB 1 =2.29 ∙10 ciclos <120 ∙10 ciclos
N HO 2=30 ∙ HB 2,4 7 6
2 =1.93∙ 10 ciclos <120∙ 10 ciclos
t h 1=0,2 ∙t =0,2 ∙11563.2=2312.64 h
t h 2=0,5 ∙t=0,5∙ 11563.2=5781.6 h
t h 1=0,3 ∙t =0,3∙ 11563.2=3468.96 h
Tl1 T 1 T l 2 0,75 ∙T 1 T l 3 0,2∙ T 1
= =1 ; = =0,75 = =0,2
T1 T 1 T1 T1 T1 T1
N HE 1=N Σ 1 ∙
[( ) ( ) ]
T l 1 3 nc 1 T l 2 3 nc 2
∙
T 1 N Σ1 T 1
+ ∙
NΣ1
Onde:
N Σ−¿ é o numero de ciclos de carregamento: N Σ=Σn ci
T li −¿ é o torque correspondente ao i-gésimo escalão
n ci−¿ é o numero de ciclos de variação das tensões durante a acção do torque T li
n ci=60 ×t ci ×n i × c
t ci−¿ é o tempo de trabalho da engrenagem durante a acção de T li
ni −¿ é a frequência de rotação do veio dado durante a acção do torque T li
c−¿ numero de engrenamentos simultâneos na roda dentada em consideração.
n c1=60 × 2312.64 ×985 ×2=273354048 ciclos
n c2=60 × 5781.6× 985 ×2=683385120 ciclos
n c3=60× 3468.96 ×985 ×2=410031072 cicl os
N Σ=Σnci=1366770240 ciclos
( 273,35404 ∙ 106
)
6 6
3 683.38512. 10 3 410,0311.10
N HE 1=1366.77 ∙10 6 ∙ 13 ∙ + 0,75 ∙ + 0,2 ∙
1366.,77 ∙ 106 1366,77 ∙ 106 1366,77 ∙ 106
7
N HE 1=56,49373941∙ 10 ciclos
N HE 1 56,49373941∙ 107 7
N HE 2= = =17,9345204 ∙10 ciclos
u 3.15
Marcos Arnaldo Tivane Pá gina 9
Projecto de accionamento de uma betoneira industrial 2018
N HO 1 1.13 ∙ 108
= =0.2<1,0
N HE 1 56,49373941∙ 107
N HO 2 1.04 ∙10
8
= =0,577<1,0
N HE 2 17,9345204 ∙107
Visto que as fracções acima calculadas são inferiores à 1 (um), então consideram-se valores
mínimos do coeficiente de longevidade.
K HL1=K HL2=1(valor mínimo para carga variável )
σ lim 1=σ Hlimb1 ∙ K HL1=1170 ∙ 1=1170 MPa
σ lim 2=σ Hlimb 2 ∙ K HL1=1130 ∙ 1=1130 MPa
Das notas da tabela 4, página 16:
S H =1,1 (para rodas com materiais de estrutura homogénea, depois da normalização)
Das recomendações página 39:
Arbitra-se: Z R ∙ Z Y ∙ K L ∙ K XH =0,9
σ lim 1 ∙ Z R ∙ Z Y ∙ K L ∙ K XH 1170∙ 0,9
[ σ HC ]1= SH
=
1,1
=957,3 MPa
σ ∙Z ∙Z ∙K ∙K 1130∙ 0,9
[ σ HC ]2= lim 2 R S Y L XH = 1,1 =924,5 MPa
H
5.1.2. Cálculo das tensões de contacto admissíveis.
[ σ HC ]=0,45∙ ([ σ HC ]1 + [ σ HC ]2 )=0,45∙ ( 957,3+924,5 )=846.8 MPa
[ σ HC ] ≤1,23 ∙ [ σ HC ]min=1,23 ∙ 924,5=1137,2 MPa
Portanto não cumpre-se a condição, logo tem-se:
[ σ HC ]=846.8 MPa
5.1.3. Cálculo do diâmetro da circunferência primitiva
√
T 2 H ∙ K Hβ ∙(u+1)
d w 1=K d ∙ 3 2
Ψ bd ∙ [ σ HC ] ∙u
Marcos Arnaldo Tivane Pá gina 10
Projecto de accionamento de uma betoneira industrial 2018
Onde:
1 /3
K d =675 MPa
Ψ bd =0,6
T 2 H =T 2=471,5 N . m
Da tab .16 pagina 41 ,tem−se : K Hβ=1,09
d w 1=675 ∙
√
3 471,5∙ 1,09 ∙ ( 3,15+1 )
0,6 ∙ 846.82 ∙ 3,15
=76,3 mm
Adopta-se:d 1=d w1 =77 mm
d 2=u ∙ d 1 → d 2=3,15 ∙ 77=242,55 mm=243 mm
b w1 =Ψ bd ∙ d1 =0,6 ∙77=46.2 mm
√
a w =K a ∙ (u+ 1 ) ∙ 3
T 3 H ∙ K Hβ
u ∙Ψ ba ∙ [ σ HC ]
2
2 ∙Ψ bd 2 ∙0,6
Ψ ba= = =0,3 , ovalor normalizado é Ψ ba=0.315
( u+1 ) 3,15+1
1 /3
Das notas da pagina 44 , tem−se : K a=430 [ MPa ]
T 3 H =T 3=1455.7 N . m
a w =430 ∙ ( 3,15+1 ) ∙ 3
√ 1455.7 ∙1,09
3,15 2 ∙ 0,315∙ 846.82
=159.04 mm
5.1.4. Determinação dos módulos normal e tangencial
Pela tabela 19 escolhe-se:
Ψ m =30 … 25= 27
bw
m n= → m n=39 /27=1.71
Ψm
Da tabela 20 escolhe-se:
mn=2, ε β =2 , para dentes inclinados
( )
2 π ∙ mn ∙ ε β −1 2 π ∙ 2∙ 2
sin β= → β=sin → β =32.9°
bw 46.2
5.1.5. Determinação do número de dentes do pinhão
Marcos Arnaldo Tivane Pá gina 11
Projecto de accionamento de uma betoneira industrial 2018
( d 1 ∙ cos β ) 77 ∙cos (32.9 °)
Z1 = → Z 1= =32,3
mn 2
Adopta-se Z1 =33 dentes
( )
Z 1 ∙ mn −1 33 ∙2
cos β= → β=cos → β=31°
d1 77
β = (25...40°) está dentro dos parâmetros exigidos para rodas dentadas helicoidais angulares
5.1.6. Determinação do número de dentes da roda dentada movida
Z2 =u∙ Z 1=3,15∙ 33=103,95mm Adopta-se: Z2 =104
5.1.7. Diâmetros dos círculos divisores
Z 1 ∙ mn 33 ∙2
d w 1= → d w 1= =77 mm
cos β cos ( 31 ° )
Z ∙m 104 ∙ 2
d w 2= 2 n → d w 2 = =242.6 mm ≈ 243 mm
cos β cos ( 31 ° )
5.1.8. Determinação da distância interaxial
d w 1+ d w 2 77+243
a w= = =160 mm
2 2
5.1.9. Calculo dos valores das tensões de contacto admissíveis
σ lim ¿∙ Z ∙Z Y ∙ K L ∙ K XH
[ σ HC ]= SH
R
¿
Tomando-se o grau de precisão 6 (Ra = 2,5...1,25) escolhe-se ZR = 0,95
π ∙ d 1 ∙n 1 π ∙ 33 ∙ 985
V 1= = =4 m/ s
60000 60000
Como V 1 <5 m/s então ZV =1 ; K L =1 ; S H =1,1
Como d w 2=243 mm< 700 mmentão K XH =1
σ lim 1 ∙ Z R ∙ Z Y ∙ K L ∙ K XH 842,5∙ 0,95 ∙1 ∙ 1∙ 1
[ σ HC ]1= SH
=
1,1
=600,5 MPa
Marcos Arnaldo Tivane Pá gina 12
Projecto de accionamento de uma betoneira industrial 2018
σ lim 2 ∙ Z R ∙ Z Y ∙ K L ∙ K XH 815,5∙ 0,95 ∙ 1∙ 1∙ 1
[ σ HC ]2= SH
=
1,1
=581,2 MPa
[ σ HC ]❑=0,45 ∙([ σ HC ]1 + [ σ HC ] ¿ ¿ 2)=0,45 ∙(600,5+581,2)=782,6 MPa¿
5.1.10. Determinação dá tensão admissível à fadiga dos dentes por flexão
σ flim ∙ Y R ∙ Y S ∙ K XF
[ σ FC ]= SF
σ flim=σ °flimb ∙ K FG ∙ K Fd ∙ K Fc ∙ K FL
Onde:
σ °flimb 1=1,35 ∙ HB 1 +100=1,35 ∙ 550+ 100=842,5 MPa
°
σ flimb 2=1,35 ∙ HB 2 +100=1,35 ∙ 530+100=8115,5 MPa
S F 1=S f 2=1,65 da tabela 10 para o melhoramento
K FG=1 – Para engrenagens com a superfície de transição dos pés dos dentes não rectificada
K Fd=1 – Para rodas dentadas sem endurecimento por deformação ou para tratamento
electroquímico das superfícies de transição.
K Fc=1 – Coeficiente de longevidade.
6
N FO=N FO 1=N FO 2 =4 x 10 para todos aços
[( ) ( ) ( ) ]
mf mf mf
T l1 n T n T nc 3
N HE 1=N Σ 1 ∙ ∙ c1 + l2 ∙ c 2 + l3 ∙
T1 N Σ 1 T1 N Σ1 T1 N Σ1
( 273,35404 ∙ 106
)
6 6
6 683.38512. 10 6 410,0311.10
N HE 1=1366,77 ∙10 6 ∙ 16 ∙ + 0,75 ∙ + 0,2 ∙
1366.77 ∙ 106 1366.77∙ 106 1366.77 ∙106
8
N HE 1=3,95 ∙10 ciclos
N HE 1 399,132∙ 107
N HE 2= = =1,25 ∙108 ciclos
u 3,15
√ N FO N
√
6 6
mf 4 ∙10 6 4 ∙ 10
K FL1= → FO = → m f =6 ; K FL 1 = =0,465
N FE 1 N FE 1 3,95∙ 108 3,95 ∙10
8
K FL2=
√
mf N FO
→
N FO
=
4 ∙ 106
N FE 2 N FE 2 1,25∙ 108
→ mf =6 ; K FL2= 6 4 ∙ 106
1,25 ∙ 10
8
√
=0,563
Como: N FE 1>N F 01 e N FE 2> N F 02 , Então K FL1=K FL1=1.
Marcos Arnaldo Tivane Pá gina 13
Projecto de accionamento de uma betoneira industrial 2018
°
σ flim 1=σ flimb 1 ∙ K FG ∙ K Fd ∙ K Fc ∙ K FL =842,5 ∙ 1∙ 1∙ 1∙ 1=842,5 MPa
°
σ flim 2=σ flimb 2 ∙ K FG ∙ K Fd ∙ K Fc ∙ K FL=815,5 ∙ 1∙ 1∙ 1∙ 1=815,5 MPa
Y R=1,2 - Para melhoramento e normalização.
Y S =0,98 - Da tabela 8 para mn = 2.
K XF =1 - Ver tabela 9, para diâmetro menor que 300 mm.
S F=1,65 – Para melhoramento
σ flim 1 ∙Y R ∙Y S ∙ K XF 842,5 ∙1,2 ∙ 0,98∙ 1
[ σ FC ]1= SF
=
1,65
=480,6 MPa
σ ∙Y ∙Y ∙ K 815,5 ∙1,2 ∙ 0,98 ∙1
[ σ FC ]2= flim2 RS S XF = 1,65
=455,6 MPa
F
5.1.11. Cálculo testador à fadiga por contacto
σ HC =Z H ∙ Z M ∙ Z ε ∙
√ ω Ht ∙ ( u+1 )
dw 1 ∙ u
≤ [ σ HC ]
Z H =1,45 - Interpolado na tabela 21 (para x = 0, e β = 31°)
1/ 2
Z M =275 [ MPa ] - Tabela 15 aço/aço
Z ε=
1
εα √
ε α =[ 1,88−3,2∙ ( 1/Z 1 +1/Z 2 ) ] =[ 1,88−3,2 ∙ ( 1/33+1 /243 ) ]=1,47
Z ε=
√ 1
εα
→ Z ε=
√ 1
1,47
=0,825
T1 471,5
F t=2000 ∙ =2000 ∙ =12246,7 N
d w1 77
Escolhe-se o 9° grau de precisão de transmissão, toma-se:
K Hα =1,13 - Tabela 22
K Hβ=1,09 para disposição assimétrica
δ H =0,002 - Tabela 26- 9° grau
g0 =82, da página 53, tabela 26.
V =4 m/ s
Marcos Arnaldo Tivane Pá gina 14
Projecto de accionamento de uma betoneira industrial 2018
ω HV =δ H ∙ g0 ∙V ∙
√ aw
u √
→ ω HV =0,002 ∙ 82∙ 4 ∙
160
4
=4.64 N /mm
ω HV ∙b w 4,64 ∙ 46.2
K HV =1+ =1+ =1,01
F Ht ∙ K Hα ∙ K Hβ 12246,7 ∙ 1,13∙ 1,07
Ft 12246,7
ω Ht = ∙ K Hα ∙ K Hβ ∙ K HV = ∙1,13 ∙1,07 ∙ 1,01=331,14 N /mm
bw 46,2
Determinação de σ HC :
σ HC =1,45 ∙ 275∙ 0,825 ∙
77 ∙ 3,15
A condição de resistência cumpre-se.
√
79,419 ∙ ( 3,15+1 )
=782,6 MPa ≥ [ σ HC ]
ε=
|[ σ HC ]−σ HC|=|846,8−782,6| × 100 %=7,5 %
[ σ HC ] 846,8
5.1.12. Cálculo testador à fadiga por tensões de flexão
σ F =Y F ∙ Y ε ∙ Y β ∙ ω Ft /mn ≤ [ σ FC ]
Z1 33
ZV 1= = =55,8→ Z V 1 ≈ 56 dentes
( cos β ) ( cos 31 ° )3
3
Z2 104
ZV 2= 3
= =175,8→ Z V 2 ≈ 176 dentes
( cos β ) ( cos 31 ° )3
Da tabela 27
Y F 1=3,8para ZV 1=56 dentes e x=0
Y F 2=3,6 Para ZV 2=176 dentes
Y ε =1 para engrenagens com dentes helicoidais
β 31 °
Y β=1− =1− =0,807
140 ° 140 °
ε α =1,47 Calculado anteriormente
Ft
ω Ft = ∙K ∙K ∙K
b w Fα Fβ FV
Marcos Arnaldo Tivane Pá gina 15
Projecto de accionamento de uma betoneira industrial 2018
4+ ( ε α −1 ) ∙ ( n−5 ) 4 + ( 1,47−1 ) ∙ ( 9−5 )
K Fα = = =1
4 ∙ εα 4 ∙1,47
ω FV =δ F ∙ g o ∙ V ∙
√ aw
u
δ F =0,006 – Tabela 25, pagina 53;
go 82– Tabela 26, pagina 53.
ω FV =0,006 ∙82 ∙ 4 ∙
√ 160
4
=13,9 N / mm
ωFV ∙ bw 13,9 ∙ 46,2
K FV =1+ =1+ =1,05
Ft ∙ K Fα ∙ K Fβ 12246,7 ∙ 1∙ 1,13
K Fβ=1,13 , da tabela 16, pagina 41.
Ft 122446.7
ω Ft = ∙ K Fα ∙ K Fβ ∙ K FV → ω Ft= ∙ 1 ∙1,13 ∙1,05=313,5
bw 46,2
σ F 1 =Y F 1 ∙ Y ε 1 ∙Y β 1 ∙ ω Ft /m n ≤ [ σ FC ]
σ F 1 =3,8∙ 1 ∙0,807 ∙ 313,5/2=480,6 MPa≤ [ σ FC ] 1
σ F 2 =3,6 ∙1 ∙ 0,807∙ 313,5/2=455,6 MPa ≤ [ σ FC ]2
Portanto a resistência à flexão dos dentes cumpre-se.
5.1.13. Cálculo geométrico da transmissão
mn=2 ; Z1 =33 ; Z2 =104 ; u = 3,15; β = 31°
5.1.14. Diâmetros primitivos ou divisores
mn ∙ Z 1 2 ∙ 33
d 1=d w1 = → d1 = =78,6 ≈ 79 mm
cos β cos 31 °
mn ∙ Z 2 2 ∙ 104
d 2=d w 2= → d 2= =247,8 mm ≈ 248 mm
cos β cos 31°
Marcos Arnaldo Tivane Pá gina 16
Projecto de accionamento de uma betoneira industrial 2018
5.1.15. Diâmetros exteriores
d a 1=d 1+2 ∙ mn=79+2 ∙2=83 mm
d a 2=d 2+2 ∙ mn=248+2 ∙2=252 mm
5.1.16. Diâmetros interiores
d f 1=d 1−2 ∙ mn =79−2 ∙ 2=75 mm
d f 2=d 2−2 ∙ mn=248−2 ∙ 2=244 mm
5.1.17. Passo normal da engrenagem
Pn=mn ∙ π =2∙ π=6,28 mm
5.1.18. Passo tangencial da engrenagem
Pt =mn ∙ π /cos β=( 2 ∙ π ) ÷ cos 31° =7,48 mm
5.1.19. Cálculo das forças da transmissão
Força tangencial:
T 471,5
F t=2 ∙ 103 × 1 → F t =2∙ 103 × =24936,71 N
d1 79
Força radial:
F r=F t × tan α /cos β → F r =24936,71× tan 20/cos 31=10812,44 N
Força axial:
F a=F t × tan β → F a=24936,71 × tan31 °=12705,88 N
Tabela9. Parâmetros geométricos principais da transmissão
Símbol
Parâmetro da engrenagem Símbolo Valor Parâmetro da engrenagem Valor
o
Distância interaxial para o a
94,5 Módulo m 2,5
engrenamento zero
Coeficiente de deslocamento: no x3
aω 0
Distância interaxial 94,5 pinhão
x4 0
na roda dentada movida
Diâmetro divisor dw 3 54 Coeficiente de deslocamento xƩ 0
135
Marcos Arnaldo Tivane Pá gina 17
Projecto de accionamento de uma betoneira industrial 2018
dw 4
Diâmetro primitivo de d3 54 Ângulo de engrenamento (para α tω 20 °
funcionamento d4 135 dentes com correcção)
Diâmetro externo da roda da 3 59 Ângulo de engrenamento (para
α 20 °
dentada da4 140 dentes sem correcção)
Diâmetro interno da roda df 3 47,75 Coeficiente de cisalhamento
∆y 0
dentada df 4 128,75 invertido
5.2. Cálculo projectivo das engrenagens do segundo escalão
Escolha dos materiais
Designaçã o Material Dureza das Tensã o de rotura Limite de
superfícies HB σr escoamento σ e
Pinhã o Aço 40X 550 981 785
Roda movida Aço 40X 530 981 785
Escolha das tensões admissíveis para o cálculo à fadiga das superfícies dos dentes em
contacto
σ Hlim × Z R × Z v × K L × K xH
σ HC =
SH
A tabela a seguir apresenta os parâ metros e os coeficientes necessá rios para o cá lculo das
tensõ es admissíveis, onde o seu cá lculo nã o será apresentado como foi anteriormente
referido.
Tabela 1. Parâmetros necessários param o cálculo das tensões admissíveis
# σ Hlimb 1 [ MPa] σ Hlimb 2 [ MPa] N HO 1 N HO 2 N HE 1
8 8 8
Valor 1170 1130 1,13 ×10 1,04 ×10 1,79 ×10
# N HE 2 K HL1 K HL2 σ Hlim1 [ MPa] σ Hlim2 [ MPa]
Valor 4,48 × 10
7
1 1,15 1170 1299,3
Com os valores da tabela acima e considerando o coeficiente de segurança
S} rsub {H} =1,1¿ vem:
1170× 0,9
σ HC 1= =909,2 MPa
1,1
Marcos Arnaldo Tivane Pá gina 18
Projecto de accionamento de uma betoneira industrial 2018
1299,3× 0,9
σ HC 2= =1177,5 MPa
1,1
[ σ HC ]=0,45×(σ HC 1 +σ HC 2)
[ σ HC ]=909,15 MP a
A seguir verifica – se a condiçã o dada pela expressã o abaixo, para a tensã o admissível
má xima:
[ σ HC ] ≤1,23 × [ σ HC ]min
1,23 × [ σ HC ]min =1,23 ×909,2=1177,5 MPa> [ σ HC ]
Como a condiçã o acima nã o foi verificada, toma – se:
[ σ HC ]=909,15 MPa
Cálculo projectivo da transmissão
d w 1=k d × 3
√ T 1 H × K Hβ × ( u+1 )
2
Ψ bd × [ σ HC ] ×u
A tabela a seguir apresenta os parâ metros e coeficientes necessá rios para o cá lculo do
diâ metro do veio pinhã o:
Tabela 2. Parâmetros e coeficientes para o cálculo do diâmetro do pinhão
k [ MPa ]
# 1
3
T 1 H [N . m] K Hβ Ψ bd u [ σ HC ] [ MPa]
d
Valor 675 1455,7 1,09 0,6 4 909,15
d w 1=675 ×
√
3 1455,7 ×1,09 × ( 4+1 )
2
0,6 ×909,15 × 4
=103,5 mm
d 1=d w1 =104 mm
Determinaçã o da largura de trabalho
b w =Ψ bd × d w1 =0,6 ×104=62,11 ≈ 63 mm
Determinaçã o do mó dulo
Marcos Arnaldo Tivane Pá gina 19
Projecto de accionamento de uma betoneira industrial 2018
bw
m n= → mn=63 /40=2,59
Ψm
mn=2,5 (normalizado)
Determinação do ângulo de inclinação dos dentes
π ×mn × ε β π ×2,5 ×2
sen β= = =0,5233 → β=31,6 °
bw 63
2 2
O valor calculado encontra – se entre os limites recomendados: β=25 … 40° ( 38 ° )
Por questõ es construtivas escolhe-se β=32 °
Determinação do número de dentes do pinhão e da roda movida
a w =K a ∙ (u+ 1 ) ∙ 3
√ T 3 H ∙ K Hβ
u ∙Ψ ba ∙ [ σ HC ]
2
√
1455,7 ∙1,09
a w =430 ∙ ( 4 +1 ) ∙ 3
42 ∙ 0,6∙ 909,15
d 2=u ∙ d 1 → d 2=4 ∙104=414,1 mm
=260 mm
b w1 =Ψ bd ∙ d1 =0,6 ∙104=62,11 mm
( d 1 ∙ cos β )
104 ∙ cos(31 °)
Z1 = → Z 1= =35,29 ≈ 36 mm
mn 2,5
Z2 =u∙ Z 1=4 ∙ 36=144 mm
Diâmetros dos círculos divisors
Z 1 ∙ mn 36 ∙2,5
d w 1= → d w 1= =90 mm
cos β cos ( 31 ° )
Z2 ∙ mn 144 ∙ 2,5
d w 2= → d w 1= =360 mm
cos β cos ( 31 ° )
Determinaçãoda distância interaxial
d w 1+ d w 2 90+360
a w= = =225 mm
2 2
Marcos Arnaldo Tivane Pá gina 20
Projecto de accionamento de uma betoneira industrial 2018
Determinacao da velocidade
π ∙ d 1 ∙n 1 π ∙ 90 ∙ 1455,7
V 1= = =1,5 m/s
60000 60000
Como V 1 <5 m/s então ZV =1 ; K L =1 ; S H =1,1
Como d w 2=360 mm< 700mm então K XH =1
σ lim 1 ∙ Z R ∙ Z Y ∙ K L ∙ K XH 957,3∙ 0,95 ∙ 1∙ 1∙ 1
[ σ HC ]1= SH
=
1,1
=826,7 MPa
σ ∙Z ∙Z ∙K ∙K 1063,1∙ 0,95 ∙1 ∙1 ∙1
[ σ HC ]2= lim 2 R S Y L XH = 1,1
=918,1 MPa
H
Determinação da tensão admissível à fadiga dos dentes por flexão
σ flim ∙ Y R ∙ Y S ∙ K XF
[ σ FC ]= SF
°
σ flim=σ flimb ∙ K FG ∙ K Fd ∙ K Fc ∙ K FL
Onde:
σ °flimb 1=1,35 ∙ HB 1 +100=1,35 ∙ 550+ 100=842,5 MPa
°
σ flimb 2=1,35 ∙ HB 2 +100=1,35 ∙ 530+100=815,5 MPa
S F 1=S f 2=1,65 da tabela 10 para o melhoramento
K FG=1 – Para engrenagens com a superfície de transição dos pés dos dentes não rectificada
K Fd=1 – Para rodas dentadas sem endurecimento por deformação ou para tratamento
electroquímico das superfícies de transição.
K Fc=1 – Coeficiente de longevidade.
6
N FO=N FO 1=N FO 2 =4 x 10 para todos aços
Como: N FE 1>N F 01 e N FE 2> N F 02 , então K FL1=K FL1=1.
°
σ flim 1=σ flimb 1 ∙ K FG ∙ K Fd ∙ K Fc ∙ K FL =842,5 ∙ 1∙ 1∙ 1∙ 1=842,5 MPa
°
σ flim 2=σ flimb 2 ∙ K FG ∙ K Fd ∙ K F c ∙ K FL =815,5 ∙1 ∙1 ∙ 1∙ 1=815,5 MPa
Y R=1,2 - Para melhoramento e normalização.
Y S =1,02 - Da tabela 8 para mn = 2,5 (resultando da interpolação)
K XF =1 - Ver tabela 9, para diâmetro menor que 300mm.
Marcos Arnaldo Tivane Pá gina 21
Projecto de accionamento de uma betoneira industrial 2018
S F=1,7 – Para melhoramento
σ flim 1 ∙Y R ∙Y S ∙ K XF 842,5 ∙1,2 ∙ 1,03∙ 1
[ σ FC ]1= SF
=
1,65
=624,98 MPa
σ ∙Y ∙Y ∙ K 815,5 ∙1,2 ∙ 1,02∙ 1
[ σ FC ]2= flim2 RS S XF = 1,65
=604,95 MPa
F
Cálculo testador à fadiga por contacto
σ H C =Z H ∙ Z M ∙ Z ε ∙
√ ω Ht ∙ (u+ 1 )
dw 1∙ u
≤ [ σ HC ]
Z H =1,55 - Interpolado na tabela 21 (para x = 0, e β = 31°)
Z M =275 [ MPa ]1/ 2 - Tabela 15 aço/aço
Z ε=
1
εα √
ε α =[ 1,88−3,2∙ ( 1/Z 1 +1/Z 2 ) ] =[ 1,88−3,2 ∙ ( 1/36+1 /144 ) ]=1,785
Z ε=
√ 1
εα
→ Z ε=
√ 1
1,785
=0,75
T1 1455,7
F t=2000 ∙ =2000 ∙ =32348 N
d w1 90
Escolhe-se o 9° grau de precisão de transmissão, toma-se:
K Hα =1,09 - Tabela 22
K Hβ=1,09 para disposição assimétrica
δ H =0,002 - Tabela 26- 9° grau
g0 =17, da página 53, tabela 26.
V =1,5m/ s
ω HV =δ H ∙ g0 ∙V ∙
√ aw
u
→ ω HV =0,002 ∙17 ∙ 1,5 ∙
225
4 √=0,8 N /mm
ω HV ∙b w 0,8 ∙ 62,11
K HV =1+ =1+ =1,11
F Ht ∙ K Hα ∙ K Hβ 32348 ∙ 1,09∙ 1,09
Ft 2612
ω Ht = ∙ K ∙K ∙K = ∙ 1,13 ∙1,01 ∙1,039=686,4 N / mm
bw Hα Hβ HV 39
Marcos Arnaldo Tivane Pá gina 22
Projecto de accionamento de uma betoneira industrial 2018
Determinação de σ HC :
σ HC =1,55 ∙ 275∙ 0,75 ∙
90∙ 4
A condição de resistência cumpre-se.
√
686,4 ∙ ( 4 +1 )
=985,0 MPa≥ [ σ HC ]
ε=
|[ σ HC ]−σ HC|=|957,3−985| ×100 %=2,89 %
[ σ HC ] 957,3
Cálculo testador à fadiga por tensões de flexão
σ F =Y F ∙ Y ε ∙ Y β ∙ ω Ft /mn ≤ [ σ FC ]
Z1 36
ZV 1= = =58,2→ Z V 1 ≈ 59 dentes
( cos β ) ( cos 31 ° )3
3
Z2 144
Z V 2= 3
= =233 dentes
( cos β ) ( cos 31 ° )3
Da tabela 27
Y F 1=3,67 para ZV 1=59 dentese x=0
Y F 2=3,63 para ZV 2=233 dentes
Y ε =1 para engrenagens com dentes helicoidais
β 31 °
Y β=1− =1− =0,775
140 ° 140 °
ε α =1,785 Calculado anteriormente
Ft
ω Ft = ∙K ∙K ∙K
b w Fα Fβ FV
4+ ( ε α −1 ) ∙ ( n−5 ) 4 + ( 1,785−1 ) ∙ ( 9−5 )
K Fα = = =1
4 ∙ εα 4 ∙1,785
ω FV =δ F ∙ g o ∙ V ∙
√ aw
u
Marcos Arnaldo Tivane Pá gina 23
Projecto de accionamento de uma betoneira industrial 2018
δ F =0,006 – Tabela 25, pagina 53;
go =17 – Tabela 26, página 53.
ω FV =0,006 ∙17 ∙ 1,5 ∙
√ 225
4
=1,13 N /mm
ωFV ∙ bw 1,13 ∙62,11
K FV =1+ =1+ =1
Ft ∙ K Fα ∙ K Fβ 32348 ∙ 1∙ 1,13
K Fβ=1,13 , da tabela 16, pagina 41.
Ft 32348
ω Ft = ∙ K Fα ∙ K Fβ ∙ K FV → ω Ft = ∙ 1 ∙1,13 ∙1=79,21
bw 62,11
σ F 1 =Y F 1 ∙ Y ε 1 ∙Y β 1 ∙ ω Ft /m n ≤ [ σ FC ]
σ F 1 =3,67 ∙1 ∙0,775 ∙ 330,76/ 2,5=376,1 MPa ≤ [ σ FC ]1
σ F 2 =3,63∙ 1 ∙0,775 ∙ 330,76/ 2,5=372 MPa ≤ [ σ FC ]2
Portanto a resistência à flexão dos dentes cumpre-se.
Cálculo geométrico da transmissão
mn=2,5 ; Z1 =36 ; Z2 =144 ; u = 4; β = 31°
Diâmetros primitivos ou divisores
mn ∙ Z 1 2,5 ∙ 36
d 1=d w1 = → d1 = =105,6 ≈ 106 mm
cos β cos 31 °
mn ∙ Z 2 2,5 ∙ 144
d 2=d w 2= → d 2= =422,4 mm ≈ 423 mm
cos β cos 31°
Diâmetros exteriores
d a 1=d 1+2 ∙ mn=106+2 ∙2,5=110,6 mm
d a 2=d 2+2 ∙ mn=423+ 2∙ 2,5=427,4 mm
Marcos Arnaldo Tivane Pá gina 24
Projecto de accionamento de uma betoneira industrial 2018
Diâmetros interiores
d f 1=d 1−2 ∙ mn =106−2 ∙ 2,5=100 mm
d f 2=d 2−2 ∙ mn=423−2∙ 2,5=416 mm
Passo normal da engrenagem
Pn=mn ∙ π =2,5 ∙ π=7,85 mm
Passo tangencial da engrenagem
Pt =mn ∙ π /cos β=( 2,5 ∙ π ) ÷ cos 31 °=9,2 mm
Cálculo das forças da transmissão
Força tangencial:
3 T1 3 1455,7
F t=2 ∙ 10 × → F t =2∙ 10 × =27569,33 N
d1 106
Força radial:
F r=F t × tan α /cos β → F r =27569,33× 31=11767,21 N
Força axial:
F a=F t × tan β → F a=27569,33 × tan 31° =16921,1 N
Tabela 3. Parâmetros geométricos principais da transmissão
Parâ metro da
Símbolo Valor Parâ metro da engrenagem Símbolo Valor
engrenagem
Distâ ncia interaxial para a
94,5 Mó dulo m 2,5
o engrenamento zero
Coeficiente de x3
aω 0
Distâ ncia interaxial 94,5 deslocamento: no pinhã o x4 0
na roda dentada movida
dw 3 54 Coeficiente de 0
Diâ metro divisor xƩ
dw 4 135 deslocamento
d3 Â ngulo de engrenamento
Diâ metro primitivo de 54 α tω
(para dentes com 20 °
funcionamento d4 135
correcçã o)
Diâ metro externo da da3 59 Â ngulo de engrenamento α 20 °
roda dentada da4 140 (para dentes sem
Marcos Arnaldo Tivane Pá gina 25
Projecto de accionamento de uma betoneira industrial 2018
correcçã o)
Diâ metro interno da df 3 47,75 Coeficiente de
∆y 0
roda dentada df 4 128,75 cisalhamento invertido
1. Escolha do material das rodas dentadas e do tratamento térmico.
As transmissões por engrenagem tem uma elevada capacidade de transmissão de carga (até
dezenas de MW) porem para a transmissão da tarefa a potência a transmitir é relativamente
pequena, o que possibilita o uso de materiais de dureza baixa.
Designação Material Dureza Limite de Limite de Tratamento
HB resistência σ r escoamentoσ e Térmico
MPa , MPa
Pinhão Aço 45X 265 834 638 Melhoramento
Roda Aço 45 245 736 560 Melhoramento
movida
1. Determinação das tensões admissíveis
As tensões de contacto admissíveis podem ser dados pela expressão abaixo.
σ Hlim × Z R × Z V × K L × K X H
[ σ HC ]= SH
[ 1]
Primeiro arbitra-se: Z R × ZV × K L × K xH =0,9
O valor de σ Hlim determina-se pela fórmula:σ Hlim =σ limb × K HL [ 2 ]
Marcos Arnaldo Tivane Pá gina 26
Projecto de accionamento de uma betoneira industrial 2018
De acordo com a tabela 5 do manual de cálculo de transmissões por engrenagens para aços de
liga melhorados com dureza menor que 350HB, tem-seσ Hlimb =2× HB❑+70.
σ limb1=2 ×265+70=600 [ Mpa ]
σ limb 2=2 ×245+70=560 [ Mpa ]
2. Determinação do coeficiente de longevidade
O coeficiente de longevidade expressa o número básico do ciclo de variação das tensões, e pode
ser determinado pela equação abaixo.
N H 0=30 × HB 2.4 [ 3 ]
2.4 6
N H 01=30× 265 =19,62×10
N H 02=30× 2452.4 =16,25× 106
3. Cálculo do número equivalente do ciclo das tensões.
O número equivalente dos ciclos das tensões calcula-se pela fórmula
N HE=N Σ × Σ i
[( ) ( ) ]
T 1 i 3 n ci
T1
×
NΣ
[4]
Onde:
n ci−¿ É o número de ciclos de variação das tensões durante a acção do torque T 1i
T 1i −¿Porque correspondente ao i-gésimo escalão do ciclograma de carregamento
N Σ−¿ é o número total de ciclo durante a vida útil e é dado por: N Σ=60 × Σ t ci × ni × c
ni −¿Frequência de rotação do veio dado durante a acção do torque
c−¿é o número de pares em engrenamento, para o caso da tarefa, c=1.
n ci−¿ é o número total de ciclos por turno;
t ci−¿ Tempo de trabalho dum turno durante a acção do torque T 1i
8
N Σ=60 ×17344,8 ×230 ×1=2,39 ×10 Ciclo s
n ci=60 ×t ci ×n i × c
Marcos Arnaldo Tivane Pá gina 27
Projecto de accionamento de uma betoneira industrial 2018
n c1=60 × 0,1× 17344,8× 230× 1=23,94 × 106
6
n c2=60 × 0,5 ×17344,8 ×230 ×1=119,68 ×10
n c3=60× 0,4 ×17344,8 ×230 × 1=95,74 × 106
[ ( ) ( ) ( )]
6 6 6
8 23,94 × 10
3 119,68 ×10 95,74 × 10
N HE 1=2,39 ×10 ( 1 ) × 8
+ ( 0.5 )3 × 8
+ ( 0.1 )3 × 8
2,39 ×10 2,39 ×10 2,39 ×10
6
N HE 1=38,99 ×10
Como a diferença dos ciclos das duas rodas é na frequência de rotações têm-se:
N HE 1 38,99× 106
N HE 2= = =4,87 × 106
u 8
Visto que a carga é variável, adopta-se o mínimo valor do coeficientes de longevidades,
K HL1=K HL2=1.
σ limi=σ lim bi × K HL 1
σ lim 1=600 ×1=600 [ MPa ]
σ lim 2=560 ×1=560 [ MPa ]
Recomenda-se um coeficiente de segurança para aços melhorados igual: S H 1 =S H 2=1,1
600 ×0,9
[ σ HC ]1= 1,1
=490,9 [ MPa ]
560× 0,9
[ σ HC ]2= 1,1
=458,18 [ MPa ]
4. A tensão de contacto admissível para engrenagens
para o cálculo projectivo das engrenagens com dentes rectos, o valor de [ σ HC ] adoptado é o
menor dos valores da tensão admissível de contacto no par de rodas dentadas, então,
[ σ HC ]=[ σ HC ]2=458.18 [ MPa ] .
5. Determinação do torque máximo sobre o pinhão e roda dentada
T 1=9550 × N 1 máx /n1 → T 1 =9550 ×2,75/230 →T 1=114,18 [ N ∙ m ]
Marcos Arnaldo Tivane Pá gina 28
Projecto de accionamento de uma betoneira industrial 2018
T 2=9550 × N 2 máx / n2 → T 2=9550 ×2,695/ 28,75 →T 2=895,21 [ N ∙ m ]
6. Determinação do valor preliminar do valor de orientação para o
diâmetro primitivo do pinhão.
√
d w 1=K d × 3
T 1 H × K Hβ × ( u+1 )
2
ψ bd × [ σ HC ] × u
Onde:
Para dentes rectos: K d =770 MPa1 /3, segundo a tabela 15.
ψ bd =1, Segundo as recomendações da tabela 17 para disposição simetrica das rodas dentadas
relativamente aos apois.
K Hβ=1,04 , segundo a tabela 16, para largura relativa da roda igual, ψ bd =1 e dureza HB <350.
√
d w 1=770 × 3
114,18× 1,04 × ( 8+ 1 )
2
1× ( 458,18 ) ×8
→ d w1=66,23≈ 67 [ mm ]
A largura de trabalho das rodas dentadas é:
b ω=ψ bd ×d w 1 → b ω=1× 67=67 [ mm ]
ψ m=28, segundo a tabela 19, para transmissões do tipo redutor e dureza HB <350.
Preliminarmente, o módulo pode ser dado por:
bω 67
mt = = =2,39 mm
ψ m 28
Toma-se o mt normalizado igual a 3,5 mm.
7. Determinação do número dos dentes do pinhão e da roda dentada
Z1 =d w 1 /mt → Z 1=67/3,5=19,14 ≈20
Z2 =Z 1 × u → Z 2=20 ×8=160
Para transmissões sem deslocamento e com distancia interaxial não normalizada, os diametros
primitivos podem ser dados por:
d w 1=m❑ × Z1 =3,5× 20=70 [ mm ]
Marcos Arnaldo Tivane Pá gina 29
Projecto de accionamento de uma betoneira industrial 2018
d w 2=m❑ × Z 2=3,5× 160=560 [ mm ]
d w 1+ d w 2 70+560
a ω= = =315 [ mm ]
2 2
8. Cálculo dos valores precisos das tensões admissíveis ao contacto
[ σ HC ]=(σ Hlim × Z R × Z V × K L × K xH )/ S H
Os valores de σ Hlim1 e σ Hlim2 já foram determinados antes, e são iguais a: σ Hlim 1=600 [ MPa ] e
σ Hlim2=560 [ MPa ]
Toma-se a qualidade das superfícies de trabalho do pinhão e da roda movida de 7 o grau de
precisão ( Ra =10 … 2,5¿ , dai que toma-se Z R=1, veja a pag.14.
9. Determinação da velocidade das rodas dentadas
π × d w1 ×n 1 π × 70 ×230
v= = =0,84 m/ s
60000 60000
Para velocidades v<5 m/ s2, ZV =1.
Coeficiente que leva em conta a lubrificação, K L=1
Coeficiente que leva em conta as dimensões da roda dentada. Para diâmetros primitivos
d w 1 ≤700 mm, K xH 1=K xH 2=1
Toma-se coeficiente de segurança, S H 1 =S H 2=1,1
600 ×1× 1× 1× 1
[ σ HC ]1= 1,1
=545,45 [ MPa ]
560× 1× 1× 1× 1
[ σ HC ]2= 1,1
=509,1 [ MPa ]
para o cálculo projectivo das engrenagens com dentes rectos, o valor de [ σ HC ] adoptado é o
menor dos valores da tensão admissível de contacto no par de rodas dentadas, então,
[ σ HC ]=[ σ HC ]2=458.18 [ MPa ] .
10. Valores precisos das tensões admissíveis à flexão
As tensões admissíveis á fadiga dos dentes por flexão determinam-se pela formula abaixo.
Marcos Arnaldo Tivane Pá gina 30
Projecto de accionamento de uma betoneira industrial 2018
[ σ FC ]=( σ Flim ×Y R ×Y s × K xF ) / S F
Onde:
σ Flim −¿é o limite à fadiga por flexão dos dentes que corresponde ao número equivalente
de
ciclos de variação das tensões, em MPa;
0 ❑
σ Flim =σ Flimb × K Fg × K Fd × K FC × K FL
σ Flimb=1,35 × HB+100 (Tabela 10, para melhoramento)
=1,35 ×265+ 100=457,75 [ MPa ]
0
σ Flimb 1
=1,35 ×245+ 100=430,75 [ MPa ]
0
σ Flimb 2
é o coeficiente que leva em conta a influência da
K Fg−¿ é o coeficiente que leva em conta a influência da rectificação da superfície de transição
dos pés dos dentes,Para superfície de transição dos pés dos dentes não rectificado, K Fg=1
K Fd−¿ é o coeficiente que leva em conta a influência do endurecimento por deformação ou do
tratamento electroquímico da superfície de transição dos pés dos dentes.Para engrenagens sem
endurecimento por deformação ou tratamento da superfície dos dentes, K Fd=1
K FC −¿ é o coeficiente que toma em conta a influência da reversibilidade do sentido de
aplicação da carga sobre os dentes.Para carga irreversível, K FC =1
K FL=
√
mf N FO
N FE
N FO−¿é o número básico de ciclos de variação das tensões; N FO=4 ×106
mf =6 , para materias com HB <350.
Sabe-se que : N FE 1=N HE 1 =38,99× 106 e N FE 2=N HE 2=4,87 ×10 6, para N FE 1 , N FE 2 > N FOtoma-se
K FL1=K FL2=1
=457,75× 1× 1× 1× 1=457,75 [ MPa ]
0
σ Flim1
σ 0Flim2=430,75 ×1× 1× 1× 1=430,75 [ MPa ]
Marcos Arnaldo Tivane Pá gina 31
Projecto de accionamento de uma betoneira industrial 2018
Y R−¿ é o coeficiente que leva em conta a rugosidade da superfície de transição dos pés
dos
dentes. Para melhoramento Y R=1,2.
Y s −¿é o coeficiente que leva em conta o gradiente das tensões e a sensibilidade do
material àconcentração das tensões. Y s =0,995(Tabela 8 [1], mn=3,5mm)
K xF −¿é o coeficiente que leva em conta as dimensões da roda dentada. Da tabela 9 , Para
roda pinhão com d <300 mm, K xF1=1Para doda movida com d=560, K xF2 ≈ 0,98
S F 1=S F 2=1,65 (Tabela 10, para melhoramento)
( 457,75 ×1,2 ×0,995 ×1 )
[ σ FC ]1= 1,65
=331,25 [ MPa ]
( 430,75 ×1,2 ×0,995 ×0,98 )
[ σ FC ]2= 1,65
=305,47 [ MPa ]
11. Cálculo testador a fadiga por contacto das superfícies de trabalho dos dentes
Tensões de contacto que surgem nas superfícies de trabalho dos dentes
σ H =Z H × Z M × Z ε ×
√ ( )
ω Ht u+1
dw 1 u
Onde:
σ H não deve ser mais de 10% menor que [σ H ] nem mais que 5% maior
Z H −¿ é o coeficiente que tem em conta a forma das superfícies conjugadas dos dentes
no polo de engrenamento. Z H =1,76(Tabela21 , para β =0 e x=0)
Z M é o coeficiente que considera as propriedades mecânicas dos materiais das engrenagens
conjugadas, em MPa1 /2, em geral para aços/aços, Z M =275 MPa1 /2
Para engrenagens com dentes rectos:
Z ε=
√ 1
εα
ε α - é o coeficiente de sobreposição (ou relação de contacto) frontal, e pode ser
determinado pela equação abaixo.
Marcos Arnaldo Tivane Pá gina 32
Projecto de accionamento de uma betoneira industrial 2018
[
ε α = 1,88−3,2×
( z1 + z1 )] cos β , sabe-se que β=0 °
1 2
[
ε α = 1,88−3,2× ( 201 + 1601 )] cos 0 °=1,7
Z ε=
√ 1
1,7
=0,767
ω Ht −¿força tangencial específica calculada em N/mm;
ω Ht =
( )F Ht
bw
× K Hα × K Hβ × K HV
F Ht −¿força tangencial calculada, em N
3 T1 3 114,18
F Ht =2× 10 × =2 ×10 × =3262,29 [ N ]
d w1 70
b w =67 [ mm ]
Da tabela 23 escolhe-se 6o grau de precisão ( vlimite =15 m/s)
Tabela 22, em função da velocidade linear tem-se K Hα =1
K Hβ=1,04 , segundo a tabela 16, para largura relativa da roda igual, ψ bd =1 e dureza HB <350.
ω HV × bw
K HV =1+
F Ht × K Hα × K Hβ
ω HV =δ H × go × v ×
√ aw
u
δ H =0,006 (Tabela 25, para dentes rectos)
go =47 (Tabela 26, para o 7grau de precisão escolhido)
ω HV =0,006 × 47 ×0,84 ×
√ 315
8
=1,49 [ N / mm ]
1,49× 67
K HV =1+ =1.03
3262,29× 1× 1,04
Marcos Arnaldo Tivane Pá gina 33
Projecto de accionamento de uma betoneira industrial 2018
ω Ht = ( 3262,29
67 )
×1 ×1,04 × 1,03=52,16 [ N /mm ]
σ H =1,76 × 275× 0,767 ×
√ 67 ( )
52,16 8+ 1
8
=347,4 [ MPa ]
12. Margem de erro:
[ σ H ]−σ H 509,01−347,4
∆ σ= = ×100 %=31,7 %
[σ H ] 509,09
A condição de que σ H não deve ser mais de 10% menor que [ σ H ], nem mais que 5% maior, e não
é satisfeita, então arbitra-se uma novo b w =45 mm
1,49× 45
K HV =1+ =1.02
3262,29× 1× 1,04
ω Ht = ( 3262,29
45 )
×1 ×1,04 × 1,02=76,9 [ N /mm ]
σ H =1,76 × 275× 0,767 ×
√ 45 ( )
76,9 8+1
8
=514,73 [ MPa ]
13. Recorreção do erro:
[ σ H ]−σ H 509,09−514,73
∆ σ=
[σ H ] |
=
509,09 |×100 %=1,11 %
14. Cálculo à fadiga dos dentes por flexão
ω Ft
σ F =Y F × Y ε ×Y β ×
m❑
Os valores de Y F escolhem-se da tabela 27, Y F 1=4,08( para Z1 =20e coeficiente de
deslocamento, x=0), e Y F 2 ≈3,63 ( para Z2 =160e coeficiente de deslocamento, x=0).
Y ε =1( para transmissões com dentes rectos).
Marcos Arnaldo Tivane Pá gina 34
Projecto de accionamento de uma betoneira industrial 2018
F Ht =3262,29 [ N ]( antes calculada), b w =45 mm , K Fα =1( para dentes rectos), K Fβ=1,04 ( antes
calculado), K Fv e K Fv são determinados abaixo.
ω FV =δ F × g o × v ×
√ aw
u
δ F =0.016 (Tabela 25, para dentes recto)
go =47 (Tabela 26, para o grau 7 precisão escolhido).
ω FV =0,016 × 47× 0,84 ×
√ 315
8
=3,96 [ N /mm ]
ω FV ×b w
K FV =1+
F Ft × K Fα × K Fβ
3,96 × 45
K FV =1+ =1,05
3262,29× 1× 1,04
ω Ft =( )F Ft
bw
× K Fα × K Fβ × K FV
ω Ft = ( 3262,29
45 )
×1 ×1,04 ×1,05=79,19 [ N / mm ]
ω Ft
σ F =Y F × Y ε ×Y β ×
m❑
79,19
σ F 1 =4,08 ×1 ×1 × =40,37 [ MPa ]
8
79,19
σ F 2 =3,63× 1× 1× =35,93 [ MPa ]
8
Portanto:σ F 1 < [ σ FC ] 1=331,25 [ MPa ] e σ F 2 < [ σ FC ]2=305,47 [ MPa ]
Portanto, a condição de resistência dos dentes á flexão cumpre-se.
15. Cálculo geométrico da transmissão
Dados de partida:
Marcos Arnaldo Tivane Pá gina 35
Projecto de accionamento de uma betoneira industrial 2018
m=3,5 mm , Z1 =20; Z2 =160; u=8 , x 1=x 2=0
O cálculo da geometria faz-se de acordo com a sequência abaixo.
Diâmetros primitivos.
d 1=d w1 =m❑ × Z 1=3,5 ×20=70 [ mm ]
d 2=d w 2=m❑ × Z 2=3,5 ×160=560 [ mm ]
Diâmetros exteriores
d a 1=d 1+2 m=70+2 ×3,5=77 [ mm ]
d a 2=d 2+2 m=560+2 ×3,5=567 [ mm ]
Diâmetros internos:
d f 1=d 1−2,5 m=70−2,5 ×3,5=61,25 [ mm ]
d f 2=d 2−2,5 m=560−2,5 ×3,5=551,25 [ mm ]
Diâmetros de base:
d b 1=d 1 ×cos α =70× cos 20 °=65,77 [ mm ]
d b 2=d 2 × cos α =560 ×cos 20 °=526,23 [ mm ]
Considerou-se, α =20 ° .
Passo de engrenamento, em mm
Pt =π × m=π × 3,5=10,996 [ mm ]
Cálculo de forças na transmissão
Força tangencial , em N.
T1 114,18
F t=2 ×10 3 × =2× 103 × =3262,29 N
dω 1 70
Força radial, em N.
F r=F t × tan α =3262,29× tan 20 °=1187,38 N
Marcos Arnaldo Tivane Pá gina 36
Projecto de accionamento de uma betoneira industrial 2018
Cálculo simplicados dos diâmetros dos veios
A condição de resistencia dos veios é a seguinte:
16 ×T i 16× T i 3
≤ [ τ ] ou ≤d
π ×d
3
π ×[ τ ]
Sabe-se que [ τ ]varia de 20 … 30 MPa, considera-se [ τ ]=20 MPa
d 1=
√
3 16 ×114180
π × 20
=30,56 mm , considera−se d 1=32 mm pertecente a série Ra 20
d 2=
√
3 16 ×895210
π × 20
=60,71 mm , considera−se d 2=63 mm pertecente a série Ra10.
Marcos Arnaldo Tivane Pá gina 37
Você também pode gostar
- Equipamentos de estaleiros para construção civilDocumento37 páginasEquipamentos de estaleiros para construção civilfaizal100% (4)
- Braço robótico para manipulação de PCIDocumento91 páginasBraço robótico para manipulação de PCIWillian Alves100% (1)
- Estrutura Metalica - Galpao - Memorial Descritivo e de CalculoDocumento107 páginasEstrutura Metalica - Galpao - Memorial Descritivo e de CalculoTúlio Paixão de França100% (3)
- Transporte e ComunicaçãoDocumento9 páginasTransporte e ComunicaçãoMADUCHO100% (1)
- Manual Operação Manutenção Central Detecção Incêndio Juno NetDocumento20 páginasManual Operação Manutenção Central Detecção Incêndio Juno NetMAR FIREAinda não há avaliações
- Instituto Politecnico de NampulaDocumento17 páginasInstituto Politecnico de NampulaBacar GodinhoAinda não há avaliações
- Projecto Mecanico - Luis R. Machaia - RectificadoDocumento26 páginasProjecto Mecanico - Luis R. Machaia - RectificadoBacar GodinhoAinda não há avaliações
- Projecto Mecanico - Honaldo J. Mario - RectificadoDocumento21 páginasProjecto Mecanico - Honaldo J. Mario - Rectificadoabacar da rosa godinhoAinda não há avaliações
- Projecto de MaquinasDocumento22 páginasProjecto de Maquinasabacar da rosa godinhoAinda não há avaliações
- Trabalho Elementos IIDocumento29 páginasTrabalho Elementos IIGabriela SantosAinda não há avaliações
- Projeto de carro guinchoDocumento90 páginasProjeto de carro guinchojfreixooliveiraAinda não há avaliações
- Projecto de Maquinas - Luis R. MachaiaDocumento26 páginasProjecto de Maquinas - Luis R. Machaiaabacar da rosa godinhoAinda não há avaliações
- Projeto de elevador para edifícioDocumento72 páginasProjeto de elevador para edifícioSilvio Martins DomingosAinda não há avaliações
- Memorial Volume 01 - Poxore U - R08Documento241 páginasMemorial Volume 01 - Poxore U - R08Olivio Assis de OliveiraAinda não há avaliações
- Projecto de Bombeamento de Água No Poço para Um Tanque AéreoDocumento33 páginasProjecto de Bombeamento de Água No Poço para Um Tanque AéreojuvenciozimbazimbaAinda não há avaliações
- Mini Usina Termelétrica 3DDocumento29 páginasMini Usina Termelétrica 3DDouglas Goesse CardosoAinda não há avaliações
- 18november Sitoe Edson.. FinalDocumento39 páginas18november Sitoe Edson.. Finalsitoe eugenioAinda não há avaliações
- Grupo - 1 - Memória Descritiva - Rui - GonçalvesDocumento43 páginasGrupo - 1 - Memória Descritiva - Rui - GonçalvesDavid CaçadorAinda não há avaliações
- TAI6 MotorStirlingDocumento34 páginasTAI6 MotorStirlingLucas Boeira MichelsAinda não há avaliações
- Projeto Rotor RadialDocumento36 páginasProjeto Rotor RadialGuilhermeAinda não há avaliações
- Dimensionamento Movimentação Roletes AcionadosDocumento86 páginasDimensionamento Movimentação Roletes Acionadoslarozan100% (1)
- Trabalho TCC Outubro - CORRIGIDO para Eviar EduardoDocumento21 páginasTrabalho TCC Outubro - CORRIGIDO para Eviar Eduardoalexandrehenriquee10Ainda não há avaliações
- Máquina de ensaio de tração mecânica de baixo custoDocumento30 páginasMáquina de ensaio de tração mecânica de baixo custoBÍBLIA ABERTAAinda não há avaliações
- Relatório - Marcos Miranda - #14811Documento110 páginasRelatório - Marcos Miranda - #14811ÂngelaCorreiaAinda não há avaliações
- Projecto Mecanico-2015 Projecto de Accionamento de CabrestanteDocumento95 páginasProjecto Mecanico-2015 Projecto de Accionamento de CabrestanteSilas Nequice100% (1)
- Caderno Tecnico Parametros de Equipamentos Ref Jan 2023Documento440 páginasCaderno Tecnico Parametros de Equipamentos Ref Jan 2023manganalAinda não há avaliações
- Jaime Carlos Huo - PI CV4Documento21 páginasJaime Carlos Huo - PI CV4Jaime HuoAinda não há avaliações
- TCC Iuri ToffoloDocumento91 páginasTCC Iuri ToffoloMarcos Tavares PorschAinda não há avaliações
- TCC Marcelo Pineda Vieira Prensa ExcentricaDocumento60 páginasTCC Marcelo Pineda Vieira Prensa ExcentricaNablaFiAinda não há avaliações
- Caderno Técnico - G24-Estrutura MetálicaDocumento30 páginasCaderno Técnico - G24-Estrutura MetálicaRafael GomesAinda não há avaliações
- 2020 Emanuel Tu DescoDocumento126 páginas2020 Emanuel Tu DescoZeus BrawlAinda não há avaliações
- SELETOR DE MATERIAIS AUTOMÁTICO PARA INDÚSTRIADocumento82 páginasSELETOR DE MATERIAIS AUTOMÁTICO PARA INDÚSTRIARicardo AraujoAinda não há avaliações
- Dimensionar e Projectar Um Accionamento Por Engrenagens Cilíndricas de Dentes Angulares (Chimbutane, Juvêncio Acácio)Documento145 páginasDimensionar e Projectar Um Accionamento Por Engrenagens Cilíndricas de Dentes Angulares (Chimbutane, Juvêncio Acácio)Juvencio ChimbutaneAinda não há avaliações
- Calculo Do Acionamento - HasteDocumento29 páginasCalculo Do Acionamento - HasteFernando HumbertoAinda não há avaliações
- 2019 LeonardoRochaMatos TCCDocumento90 páginas2019 LeonardoRochaMatos TCCSalustiano Guimaraes Man SalasAinda não há avaliações
- Trabalho - Maquinas Salientes de Polos (Edson, Jose, Roque) .... (Guardado Automaticamente)Documento22 páginasTrabalho - Maquinas Salientes de Polos (Edson, Jose, Roque) .... (Guardado Automaticamente)Majenda LimitediAinda não há avaliações
- Projeto Ponte Rolante PDFDocumento53 páginasProjeto Ponte Rolante PDFrprojetos001tiAinda não há avaliações
- Projeto Ponte RolanteDocumento53 páginasProjeto Ponte RolanteMonica Zambuzi100% (1)
- Traballho Grau BDocumento25 páginasTraballho Grau BMaicon MassignaAinda não há avaliações
- Inocencio 035646Documento8 páginasInocencio 035646Flodio CunaAinda não há avaliações
- Projeto de multiplicador de velocidade para aerogeradorDocumento42 páginasProjeto de multiplicador de velocidade para aerogeradormikael bezerra cotias dos santosAinda não há avaliações
- SPT Analise Quadros Bicicletas PDFDocumento55 páginasSPT Analise Quadros Bicicletas PDFPaulo Eduardo MacedoAinda não há avaliações
- TCC Maquina de Velas de MetroDocumento51 páginasTCC Maquina de Velas de MetroIago AlencarAinda não há avaliações
- ANÁLISE DE FALHAS DA MINI PÁ CARREGADEIRADocumento55 páginasANÁLISE DE FALHAS DA MINI PÁ CARREGADEIRAIgor SouzaAinda não há avaliações
- Critérios para seleção de guindastesDocumento59 páginasCritérios para seleção de guindastesTiago SenaAinda não há avaliações
- Critérios para seleção de guindastesDocumento59 páginasCritérios para seleção de guindastesTiago SenaAinda não há avaliações
- 39359 Macaco Mecanico Tesoura 62DDocumento59 páginas39359 Macaco Mecanico Tesoura 62Dp.pulidofolqueAinda não há avaliações
- Substituição do arame recozido por solda MIG MAGDocumento40 páginasSubstituição do arame recozido por solda MIG MAGSamyla AndradeAinda não há avaliações
- PR NPVMCDocumento86 páginasPR NPVMCjpedro.costa8323Ainda não há avaliações
- Bancada teste motores industriaisDocumento30 páginasBancada teste motores industriaisDavi BackupAinda não há avaliações
- Universidade Comunitaria Da Regiao de CHDocumento114 páginasUniversidade Comunitaria Da Regiao de CHJosemar Pereira da SilvaAinda não há avaliações
- Otimização de bancada de ensaio de CVTDocumento76 páginasOtimização de bancada de ensaio de CVTEduardoAinda não há avaliações
- Projeto de um pórtico de cais para contentores de 62,5mDocumento294 páginasProjeto de um pórtico de cais para contentores de 62,5msergiooiAinda não há avaliações
- MDJ-Fotovoltaico 06.03.16Documento26 páginasMDJ-Fotovoltaico 06.03.16Micael FigueiraAinda não há avaliações
- P. Mecanico - Ahemed AtumaneDocumento19 páginasP. Mecanico - Ahemed Atumaneabacar da rosa godinhoAinda não há avaliações
- TCC 1 João M. - ESTUDO AVALIATIVO DA CONFORMIDADE DO CONCRETO ESTRUTURAL EM SINOP-MTDocumento40 páginasTCC 1 João M. - ESTUDO AVALIATIVO DA CONFORMIDADE DO CONCRETO ESTRUTURAL EM SINOP-MTjpedro.michelsAinda não há avaliações
- Bruno - Fernandes - 74146 - Thesis - Mechanical Design of A Formula Student Electric MotorDocumento97 páginasBruno - Fernandes - 74146 - Thesis - Mechanical Design of A Formula Student Electric Motorpiyush PatilAinda não há avaliações
- Estudo de Dispersão de Poluentes AtmosféricosDocumento123 páginasEstudo de Dispersão de Poluentes AtmosféricosAtila MartinsAinda não há avaliações
- Monetização De Usinas Hidrelétricas, Solares E Eólicas: Aspectos Regulatórios De Mapeamento, Modelagem E MediçõesNo EverandMonetização De Usinas Hidrelétricas, Solares E Eólicas: Aspectos Regulatórios De Mapeamento, Modelagem E MediçõesAinda não há avaliações
- Sistema De Medição Para Faturamento (smf) E Monetização Do Mercado De EnergiaNo EverandSistema De Medição Para Faturamento (smf) E Monetização Do Mercado De EnergiaAinda não há avaliações
- Engenharia Civil: Concepção, Teoria E PráticaNo EverandEngenharia Civil: Concepção, Teoria E PráticaAinda não há avaliações
- PM Chiziane FinalDocumento110 páginasPM Chiziane FinalJulio joaquim tembisseAinda não há avaliações
- Chambal - PM - 2014 - CRV 1.verdadeirodocxDocumento75 páginasChambal - PM - 2014 - CRV 1.verdadeirodocxJulio joaquim tembisseAinda não há avaliações
- Variante 7-Accionamento Do Tambor de RebarbagemDocumento1 páginaVariante 7-Accionamento Do Tambor de RebarbagemJulio joaquim tembisseAinda não há avaliações
- Variante 13Documento1 páginaVariante 13Julio joaquim tembisseAinda não há avaliações
- Guia de Correcção T1 V1 TMMDocumento6 páginasGuia de Correcção T1 V1 TMMJulio joaquim tembisseAinda não há avaliações
- Personalidade Do GestorDocumento8 páginasPersonalidade Do GestorJulio joaquim tembisseAinda não há avaliações
- Formulacao Do Modelos de Programacao LinearDocumento7 páginasFormulacao Do Modelos de Programacao LinearJulio joaquim tembisseAinda não há avaliações
- Implementação MPLS VPNs TDMDocumento44 páginasImplementação MPLS VPNs TDMMarciano OmbeAinda não há avaliações
- 454 - Passo A Passo DigitalDocumento23 páginas454 - Passo A Passo DigitalGLAYNERAinda não há avaliações
- CERNE - 2018 - Termo - Referencia - V04 - Texto Final - Ver Comentários - VLDocumento50 páginasCERNE - 2018 - Termo - Referencia - V04 - Texto Final - Ver Comentários - VLguilhermeAinda não há avaliações
- Relatório de Gestão 2011 COMGAPDocumento183 páginasRelatório de Gestão 2011 COMGAPCarlos MarquesAinda não há avaliações
- Apostila de Torno ESPRITDocumento122 páginasApostila de Torno ESPRITDiogo Monte Carvalho100% (1)
- Manual do Middleware CCDocumento67 páginasManual do Middleware CCRui GomesAinda não há avaliações
- Regiões Do Corpo HumanoDocumento16 páginasRegiões Do Corpo HumanoivanAinda não há avaliações
- Rot AluDocumento10 páginasRot AluElimara Decrece de CarvalhoAinda não há avaliações
- Introdução à Informática: Noções de Hardware e SoftwareDocumento15 páginasIntrodução à Informática: Noções de Hardware e SoftwareQuiala JoséAinda não há avaliações
- Sapucaia - Antena IdealDocumento3 páginasSapucaia - Antena IdealGilberto Adao da SilvaAinda não há avaliações
- A Saga Do Brioco PDFDocumento5 páginasA Saga Do Brioco PDFFelipeOliveiraAinda não há avaliações
- Energia e Sociedade ao Longo da HistóriaDocumento4 páginasEnergia e Sociedade ao Longo da HistórialucaoBRAinda não há avaliações
- SD-A0 RevisaoDocumento16 páginasSD-A0 RevisaoLeoAinda não há avaliações
- Anexo V - RFP - MANUTENÇÃO DE SITES IHS PDFDocumento30 páginasAnexo V - RFP - MANUTENÇÃO DE SITES IHS PDFAlex DurãesAinda não há avaliações
- Ficus eDocumento2 páginasFicus eJoão P•Ainda não há avaliações
- Checklist Veículos Entrada e SaídaDocumento4 páginasChecklist Veículos Entrada e SaídaAlexandreAinda não há avaliações
- MTG GDocumento123 páginasMTG GAlef ScholzeAinda não há avaliações
- Manual Controlador Eletronico PDFDocumento26 páginasManual Controlador Eletronico PDFVDF50% (2)
- Circuitos com diodos: LED, ceifador e polarizaçãoDocumento17 páginasCircuitos com diodos: LED, ceifador e polarizaçãoPedro Tavares MurakameAinda não há avaliações
- Tabela de Abril de 2020Documento256 páginasTabela de Abril de 2020Geraldo SoaresAinda não há avaliações
- SLIDES 13 - Escrita CientíficaDocumento52 páginasSLIDES 13 - Escrita CientíficaManoel SilvaAinda não há avaliações
- Defesa de EstágioDocumento15 páginasDefesa de EstágioEduardo FantinAinda não há avaliações
- Análise de Livros Didáticos Novo Ensino Médio Lopes e RossoDocumento12 páginasAnálise de Livros Didáticos Novo Ensino Médio Lopes e RossoBarbara OliveiraAinda não há avaliações
- Aplicativo móvel para avaliação da qualidade de vida baseado no WHOQOL-brefDocumento3 páginasAplicativo móvel para avaliação da qualidade de vida baseado no WHOQOL-brefVictor BragaAinda não há avaliações
- 2 Parte - Compilação Dos Conteúdos - STC 7Documento4 páginas2 Parte - Compilação Dos Conteúdos - STC 7Arlindoeva LeitaomadeiraAinda não há avaliações
- Diagnóstico de Falhas Atlas Red 1 PDFDocumento32 páginasDiagnóstico de Falhas Atlas Red 1 PDFLeoSilva100% (1)
- Sistemas de Reservas OnlineDocumento9 páginasSistemas de Reservas OnlineAC GLOBAL TRAVELAinda não há avaliações
- Arquiteturas Risc e CiscDocumento2 páginasArquiteturas Risc e CiscFlavia MagalhãesAinda não há avaliações