Você também pode gostar
- Aula 03 - Metodos Intuitivos para Criação de Circuitos PneumaticosDocumento4 páginasAula 03 - Metodos Intuitivos para Criação de Circuitos PneumaticosleandroschroederAinda não há avaliações
- Exercicios Pneumatica 2Documento2 páginasExercicios Pneumatica 2Facibook CjvAinda não há avaliações
- Apostila de EletrohidropneumáticaDocumento8 páginasApostila de EletrohidropneumáticaJorge luizAinda não há avaliações
- Relatório de Pneumática.Documento6 páginasRelatório de Pneumática.Gabriel Jauch100% (1)
- Relatório Pneumática 2Documento5 páginasRelatório Pneumática 2Xandao2010mecatronicAinda não há avaliações
- Para TelhadosDocumento2 páginasPara TelhadosKarolina SilvaAinda não há avaliações
- 4.2. Pneumática - Válvulas Direcionais PDFDocumento69 páginas4.2. Pneumática - Válvulas Direcionais PDFRafael FrézAinda não há avaliações
- Aula 03 - Elementos PneumáticosDocumento38 páginasAula 03 - Elementos PneumáticosAlexson RodriguesAinda não há avaliações
- Captura de Tela 2022-07-27 À(s) 16.42.33Documento81 páginasCaptura de Tela 2022-07-27 À(s) 16.42.33destaquecapasAinda não há avaliações
- Aula 03 - Elementos PneumáticosDocumento38 páginasAula 03 - Elementos Pneumáticoshjdsofp]a100% (1)
- Lista de Exercícios - SHPDocumento6 páginasLista de Exercícios - SHPFelipe SouzaAinda não há avaliações
- Descrição e Operação Sistema Hydrá. P-ContentorDocumento18 páginasDescrição e Operação Sistema Hydrá. P-Contentoralberto gabrielAinda não há avaliações
- Circuitos PneumaticosDocumento25 páginasCircuitos PneumaticosKelvin MuzilkAinda não há avaliações
- Curso Corpo VálvulasDocumento23 páginasCurso Corpo VálvulasCharles da Silva100% (1)
- Relatorio PneumaticaDocumento3 páginasRelatorio PneumaticaManuel BernalAinda não há avaliações
- Curso Corpo VálvulasDocumento23 páginasCurso Corpo VálvulasLuiz RevizziAinda não há avaliações
- Sistema de Combustível para Motores A Turbina - Requisitos GeraisDocumento36 páginasSistema de Combustível para Motores A Turbina - Requisitos GeraisVictor MirandaAinda não há avaliações
- Motor Eletrônico OficialDocumento43 páginasMotor Eletrônico OficialAugusto Sousa LimaAinda não há avaliações
- 7 Hidráulica Básica - Válvulas HidráulicasDocumento52 páginas7 Hidráulica Básica - Válvulas HidráulicasElessandro Manuel100% (1)
- 5 - Arriel1Documento21 páginas5 - Arriel1Yuri De Toledo GuirlandaAinda não há avaliações
- Lista de Exercícios VI - 2020-2Documento4 páginasLista de Exercícios VI - 2020-2Mikael CassaoAinda não há avaliações
- Lab10, Válvulas de ControleDocumento6 páginasLab10, Válvulas de ControleMatheus BasílioAinda não há avaliações
- A1 - Lab - Hid - Pneu - MEC0901N-Grupo CDocumento22 páginasA1 - Lab - Hid - Pneu - MEC0901N-Grupo CPaulo VitorAinda não há avaliações
- Relatório - Fim de Curso Gatilho No Circuito Pneumático A+B+A-BDocumento9 páginasRelatório - Fim de Curso Gatilho No Circuito Pneumático A+B+A-BRayssa AguiarAinda não há avaliações
- Projeto de Elevador Hidráulico SimplesDocumento17 páginasProjeto de Elevador Hidráulico SimplesEdflávio Calavort100% (2)
- MR 10 2002-07-31 Direção Hidráulica ZF 8097 Servocom - EuroTech PDFDocumento16 páginasMR 10 2002-07-31 Direção Hidráulica ZF 8097 Servocom - EuroTech PDFgabrielzinho43100% (3)
- Tecnicas de Comando PneumaticoDocumento68 páginasTecnicas de Comando PneumaticopauloryqAinda não há avaliações
- Unidade 4 - Elemento Final de Controle PDFDocumento10 páginasUnidade 4 - Elemento Final de Controle PDFzasyyAinda não há avaliações
- Esteira TransportadoraDocumento7 páginasEsteira TransportadoraËnesson Vicente100% (1)
- Rascunho Aula 8 Dispositivos Eletropneumáticos e Eletro-Hidráulicos (Válvulas)Documento2 páginasRascunho Aula 8 Dispositivos Eletropneumáticos e Eletro-Hidráulicos (Válvulas)Auilias DiasAinda não há avaliações
- Eletropneumatica PDFDocumento8 páginasEletropneumatica PDFdschaurichAinda não há avaliações
- Apontamentos PneumáticaDocumento19 páginasApontamentos PneumáticaFilipa AlfaiateAinda não há avaliações
- Apostila Antiga HidráulicaDocumento29 páginasApostila Antiga HidráulicaDouglas MiragliaAinda não há avaliações
- Cap 9 - Servocomandos e Sistema HidráulicoDocumento48 páginasCap 9 - Servocomandos e Sistema HidráulicoEric Lima Moreira de OliveiraAinda não há avaliações
- Válvulas de Controlo de FluxoDocumento6 páginasVálvulas de Controlo de FluxoAlves OaAinda não há avaliações
- Relatório Calibragem de PosicionadorDocumento13 páginasRelatório Calibragem de PosicionadorVictor SaidAinda não há avaliações
- Lista I - (Hidráulica) - Erick Guedes Ribeiro PDFDocumento3 páginasLista I - (Hidráulica) - Erick Guedes Ribeiro PDFErick Guedes RibeiroAinda não há avaliações
- Relatório PneumáticaDocumento19 páginasRelatório PneumáticaNathaly MunhozAinda não há avaliações
- Relatório de HidráulicaDocumento4 páginasRelatório de HidráulicaGabriel JauchAinda não há avaliações
- 8 - Método CascataDocumento20 páginas8 - Método CascataGusttavoAinda não há avaliações
- PNEUM HIDRA AprendizDocumento75 páginasPNEUM HIDRA AprendizIVO LEONARDO BURGHARDTAinda não há avaliações
- L260H - Sistema de Freio, DescriçãoDocumento9 páginasL260H - Sistema de Freio, DescriçãorodrigomessiasAinda não há avaliações
- Relatório Pneumática 1Documento8 páginasRelatório Pneumática 1maidana sistemasdeclimatizaçãoAinda não há avaliações
- Pneumatica 2Documento30 páginasPneumatica 2Filipe Alberto De MagalhãesAinda não há avaliações
- Associação de Bombas em Série e Paralelo.d OcxDocumento16 páginasAssociação de Bombas em Série e Paralelo.d OcxLucastreds75% (4)
- Hidráulica e Pneumática - Aula3Documento60 páginasHidráulica e Pneumática - Aula3felipecbjr051Ainda não há avaliações
- Aula 04 - Elementos de SinaisDocumento25 páginasAula 04 - Elementos de Sinaishjdsofp]aAinda não há avaliações
- Aula Prática - Sistemas Hidropneumáticos - Metodo Intuitivo - 2018-2Documento6 páginasAula Prática - Sistemas Hidropneumáticos - Metodo Intuitivo - 2018-2Rafael FreitasAinda não há avaliações
- Valvulas de Controle DirecionalDocumento20 páginasValvulas de Controle DirecionalrenatoAinda não há avaliações
- Válvula de DesvioDocumento28 páginasVálvula de DesvioVictor MirandaAinda não há avaliações
- FDN - 18 A 40 MANUAL PRH 100AP DAVIT (TRADUZIDO)Documento29 páginasFDN - 18 A 40 MANUAL PRH 100AP DAVIT (TRADUZIDO)Rafael GoulartAinda não há avaliações
- Aula 7 - Hidraulica e Pneumatica Esquema de Comando Sequencial Rev0Documento5 páginasAula 7 - Hidraulica e Pneumatica Esquema de Comando Sequencial Rev0Victor BayarriAinda não há avaliações
- 4 - Sensores e DiagnósticosDocumento51 páginas4 - Sensores e DiagnósticosLucas Bequiman100% (3)
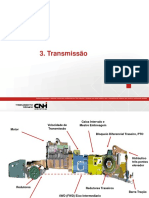
- Transmissão Magnum B10Documento34 páginasTransmissão Magnum B10Rodrigo Evaristo100% (2)
- Módulo - 1 Simbologia PneumáticaDocumento11 páginasMódulo - 1 Simbologia PneumáticaTarson Marcondes100% (1)
- Aut Hid Pne - Tema 1 - Módulo 1Documento15 páginasAut Hid Pne - Tema 1 - Módulo 1Ana Vitória Galvão VieiraAinda não há avaliações
- Apostila de Freios AtualizadaDocumento49 páginasApostila de Freios AtualizadaKleber Kl80% (10)
- UNEB 2019 Caderno 2 Medicina Modelo 1Documento17 páginasUNEB 2019 Caderno 2 Medicina Modelo 1Clara AmorimAinda não há avaliações
- Metaforas LibrasDocumento29 páginasMetaforas LibrasRobertAinda não há avaliações
- Atividade TOC TOCDocumento2 páginasAtividade TOC TOCSr RamosAinda não há avaliações
- Vamos Juntos! Notas de Um Contraturno Escolar para (Re) Significação Da Educação Básica (Capítulo de Livro)Documento10 páginasVamos Juntos! Notas de Um Contraturno Escolar para (Re) Significação Da Educação Básica (Capítulo de Livro)João PauloAinda não há avaliações
- AF121386439414pt BR0701Documento26 páginasAF121386439414pt BR0701camilo obrasAinda não há avaliações
- Modelos de LaudosDocumento6 páginasModelos de Laudoswillams AlvesAinda não há avaliações
- Alcoolismo No TrabalhoDocumento18 páginasAlcoolismo No TrabalhoJuliana SouzaAinda não há avaliações
- Portaria 218 2015 23jul CContasDocumento22 páginasPortaria 218 2015 23jul CContasJorge FranciscoAinda não há avaliações
- Homônios Veetais GAS ETILENODocumento36 páginasHomônios Veetais GAS ETILENOCleber AssisAinda não há avaliações
- Ebook Takae Sasaki V002 PDFDocumento27 páginasEbook Takae Sasaki V002 PDFRenato BaptistaAinda não há avaliações
- Apostila Irrigação 2012Documento77 páginasApostila Irrigação 2012anon_140267718Ainda não há avaliações
- Marvel RPGDocumento6 páginasMarvel RPGChaulin Diogo da CostaAinda não há avaliações
- 1 Lista de Exercicios - Poo - Lucas Zuque - 2268710Documento7 páginas1 Lista de Exercicios - Poo - Lucas Zuque - 2268710Lucas ZuqueAinda não há avaliações
- Exercicios - 2 - AlgoritmosDocumento3 páginasExercicios - 2 - AlgoritmosPedro CândidoAinda não há avaliações
- Manual Aspirador Electronia BST-803 Calipso - 3117828Documento16 páginasManual Aspirador Electronia BST-803 Calipso - 3117828Selenita VoshinAinda não há avaliações
- AzevedoDocumento14 páginasAzevedoDinheirama.comAinda não há avaliações
- Dilatação Linear de Um Sólido MetálicoDocumento9 páginasDilatação Linear de Um Sólido MetálicoCarlos HenriqueAinda não há avaliações
- Texto Empuxo e Principio de ArquimedesDocumento5 páginasTexto Empuxo e Principio de ArquimedesAlberto MaiaAinda não há avaliações
- Ebook Estratégias Que Eu Usei para Faturar Mais de 10k Por MêsDocumento61 páginasEbook Estratégias Que Eu Usei para Faturar Mais de 10k Por Mêsju.balanAinda não há avaliações
- Produção de Conteúdo para Audiência CriativaDocumento17 páginasProdução de Conteúdo para Audiência CriativaJoão Paulo HergeselAinda não há avaliações
- Síntese Da Aspirina (AAS)Documento3 páginasSíntese Da Aspirina (AAS)Izabella AlbuquerqueAinda não há avaliações
- 5 Documentários Brasileiros para Se Refletir Sobre EducaçãoDocumento5 páginas5 Documentários Brasileiros para Se Refletir Sobre EducaçãoAparecida De Fatima Gomes MacaubasAinda não há avaliações
- Modelo de Petição de Ação de Indenização Por Danos MateriaisDocumento5 páginasModelo de Petição de Ação de Indenização Por Danos Materiaisgraciele AlkmimAinda não há avaliações
- NBR 5858 - 1983Documento15 páginasNBR 5858 - 1983telnet837Ainda não há avaliações
- giroscópio2012editadoPDF (Roteiro) III PDFDocumento8 páginasgiroscópio2012editadoPDF (Roteiro) III PDFxotunredmailtopAinda não há avaliações
- Manual UFCD3539-alteradoDocumento31 páginasManual UFCD3539-alteradoClara RamalhoAinda não há avaliações
- Bambozzi Talha Eletrica Manual de Instrucao 439850Documento34 páginasBambozzi Talha Eletrica Manual de Instrucao 439850MárcioHenriqueAinda não há avaliações
- Relatório de EstagioDocumento14 páginasRelatório de EstagioCastro Naldo0% (1)
- #6 Construção de MASMORRAS 1 PGDocumento1 página#6 Construção de MASMORRAS 1 PGLIE glcAinda não há avaliações
- Formação Serviço AlentejoDocumento125 páginasFormação Serviço AlentejoCrisAinda não há avaliações
- Quero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNo EverandQuero ser empreendedor, e agora?: Guia prático para criar sua primeira startupNota: 5 de 5 estrelas5/5 (26)
- Liberdade digital: O mais completo manual para empreender na internet e ter resultadosNo EverandLiberdade digital: O mais completo manual para empreender na internet e ter resultadosNota: 5 de 5 estrelas5/5 (10)
- Guia Definitivo Para Dominar o Bitcoin e as CriptomoedasNo EverandGuia Definitivo Para Dominar o Bitcoin e as CriptomoedasNota: 4 de 5 estrelas4/5 (5)
- Inteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNo EverandInteligência artificial: Como aprendizado de máquina, robótica e automação moldaram nossa sociedadeNota: 5 de 5 estrelas5/5 (3)
- Inteligência artificial: O guia completo para iniciantes sobre o futuro da IANo EverandInteligência artificial: O guia completo para iniciantes sobre o futuro da IANota: 5 de 5 estrelas5/5 (6)
- Análise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNo EverandAnálise técnica de uma forma simples: Como construir e interpretar gráficos de análise técnica para melhorar a sua actividade comercial onlineNota: 4 de 5 estrelas4/5 (4)
- 365 Ideias De Posts Para Ter Um Instagram De Sucesso!No Everand365 Ideias De Posts Para Ter Um Instagram De Sucesso!Ainda não há avaliações
- Consultoria Especializada e Estratégias De Trade De ForexNo EverandConsultoria Especializada e Estratégias De Trade De ForexAinda não há avaliações
- Legislação De Segurança Do Trabalho: Textos SelecionadosNo EverandLegislação De Segurança Do Trabalho: Textos SelecionadosAinda não há avaliações
- Caixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasNo EverandCaixa de ferramentas da Arquitetura de Software: Como tornar suas aplicações mais escaláveis, confiáveis e segurasAinda não há avaliações
- Segurança Da Informação DescomplicadaNo EverandSegurança Da Informação DescomplicadaAinda não há avaliações
- IoT: Como Usar a "Internet Das Coisas" Para Alavancar Seus NegóciosNo EverandIoT: Como Usar a "Internet Das Coisas" Para Alavancar Seus NegóciosNota: 4 de 5 estrelas4/5 (2)
- A lógica do jogo: Recriando clássicos da história dos videogamesNo EverandA lógica do jogo: Recriando clássicos da história dos videogamesAinda não há avaliações
- Python e mercado financeiro: Programação para estudantes, investidores e analistasNo EverandPython e mercado financeiro: Programação para estudantes, investidores e analistasNota: 5 de 5 estrelas5/5 (3)