Você também pode gostar
- Cura Pela Luz Interior (Barbara Ann Brennan)Documento348 páginasCura Pela Luz Interior (Barbara Ann Brennan)Valbert88% (8)
- Manual de Programação Hanwha 2020Documento82 páginasManual de Programação Hanwha 2020MaisaGamePlays Wolff100% (2)
- Apresentacao Joao - Appleton PDFDocumento201 páginasApresentacao Joao - Appleton PDFDavid MiguelAinda não há avaliações
- TP6 SolDocumento12 páginasTP6 SolAna Carina CostaAinda não há avaliações
- edcc59a5-791f-454a-809f-ebcb7626f42eDocumento8 páginasedcc59a5-791f-454a-809f-ebcb7626f42eDavi HenriqueAinda não há avaliações
- Lista Rotação, Equilibrio (Fis II)Documento26 páginasLista Rotação, Equilibrio (Fis II)bms.pradoAinda não há avaliações
- 3 - Rotação, Rolamento e Torque - 26mar20Documento55 páginas3 - Rotação, Rolamento e Torque - 26mar20Clayton RayAinda não há avaliações
- 2 - Rotação PDFDocumento33 páginas2 - Rotação PDFCauan ProductionsAinda não há avaliações
- Cap 5Documento27 páginasCap 5almeidaciscoAinda não há avaliações
- 2 - Rotação - 19mar20Documento18 páginas2 - Rotação - 19mar20Renato Pereira (RenatoSky)Ainda não há avaliações
- Frensel K, Delgado J - Notas de Geometria Diferencial Cap1Documento37 páginasFrensel K, Delgado J - Notas de Geometria Diferencial Cap1Edson GagliardiAinda não há avaliações
- 02 Geometria Diferencial-Frensel e Delgado (UFF)Documento452 páginas02 Geometria Diferencial-Frensel e Delgado (UFF)Hamilton C RodriguesAinda não há avaliações
- M04 - Notas de Aula PDFDocumento12 páginasM04 - Notas de Aula PDFKayro CesarAinda não há avaliações
- PênduloDocumento14 páginasPêndulobig boiAinda não há avaliações
- Geo Me Tria Diferencia LDocumento64 páginasGeo Me Tria Diferencia LNeisser Arturo Soto FernándezAinda não há avaliações
- FIF333 Unidade3Documento132 páginasFIF333 Unidade3leodiagonalAinda não há avaliações
- Calor FormulaDocumento2 páginasCalor FormulaninnyAinda não há avaliações
- Física I e Cálculo I - 2022Documento61 páginasFísica I e Cálculo I - 2022Cristian Alexandre MoraesAinda não há avaliações
- Formulario Fisica 12º Ano PDFDocumento9 páginasFormulario Fisica 12º Ano PDFMaria QueirozAinda não há avaliações
- FísicaDocumento5 páginasFísicaMaria Fernanda YaminAinda não há avaliações
- Teoria de Estudo Do Movimento Periódico de Um Pendulo SimplesDocumento2 páginasTeoria de Estudo Do Movimento Periódico de Um Pendulo SimplesGrasielle SantanaAinda não há avaliações
- RotaçãoBDocumento21 páginasRotaçãoBermelindo juliaoAinda não há avaliações
- Trabalho de Rotacao FisicaDocumento15 páginasTrabalho de Rotacao Fisicajose celioAinda não há avaliações
- CAPÍTULO 04 - Movimento em Duas e Três DimensôesDocumento22 páginasCAPÍTULO 04 - Movimento em Duas e Três DimensôesjclaudiocpAinda não há avaliações
- GeodifDocumento4 páginasGeodifGustavo Ignácio Duarte -profgigduarte-Ainda não há avaliações
- Curvas e SuperficiesDocumento9 páginasCurvas e SuperficiesWellington José Leite Da SilvaAinda não há avaliações
- Prova 01Documento4 páginasProva 01priscilapprAinda não há avaliações
- Aula 2 - Funções de Excitação - Katia PDFDocumento49 páginasAula 2 - Funções de Excitação - Katia PDFMarcos Antonio Arantes de FreitasAinda não há avaliações
- Escoamentos em Regime TransienteDocumento39 páginasEscoamentos em Regime TransienteNosgam SilvaAinda não há avaliações
- Aula 1 - Calculo Vetorial AplicadoDocumento23 páginasAula 1 - Calculo Vetorial AplicadoLívia PinheiroAinda não há avaliações
- Modulo8 CalorDocumento6 páginasModulo8 CalorFernandoAinda não há avaliações
- Curvas Continuas emDocumento10 páginasCurvas Continuas emKuka Da Cesa JoaquimAinda não há avaliações
- Oscilacoes MecanicasDocumento9 páginasOscilacoes MecanicasAngelo Suisei DamiaoAinda não há avaliações
- CAPÍTULO 02 - Movimento em Uma DimensãoDocumento24 páginasCAPÍTULO 02 - Movimento em Uma DimensãojclaudiocpAinda não há avaliações
- Vetores Normal e Binormal PDFDocumento13 páginasVetores Normal e Binormal PDFBruno CarvalhoAinda não há avaliações
- Vetores Normal e Binormal PDFDocumento13 páginasVetores Normal e Binormal PDFBruno CarvalhoAinda não há avaliações
- Vetores Normal e Binormal PDFDocumento13 páginasVetores Normal e Binormal PDFBruno CarvalhoAinda não há avaliações
- Aula 1 - Funções Com Valores VetoriaisDocumento13 páginasAula 1 - Funções Com Valores VetoriaisMarkus DämonAinda não há avaliações
- Relatório 7Documento3 páginasRelatório 7bernardo.marinho2010Ainda não há avaliações
- Momentos de Inércia de Massas: I MR RDocumento7 páginasMomentos de Inércia de Massas: I MR RvsclopesAinda não há avaliações
- Notas de Estudo de Comprimento de Arco e CurvaturaDocumento3 páginasNotas de Estudo de Comprimento de Arco e CurvaturaMarlon RibeiroAinda não há avaliações
- Lista Mod 1 Lis 2 c3 02 2019Documento9 páginasLista Mod 1 Lis 2 c3 02 2019Matheus RodriguesAinda não há avaliações
- Lista - Funções VetoriaisDocumento2 páginasLista - Funções Vetoriaisbeatriz100% (1)
- Problemas de Mecanica - Tore Jhonson - Ex 39-3 e 39-7Documento5 páginasProblemas de Mecanica - Tore Jhonson - Ex 39-3 e 39-7Luis Gustavo LeonessaAinda não há avaliações
- giroscópio2012editadoPDF (Roteiro) III PDFDocumento8 páginasgiroscópio2012editadoPDF (Roteiro) III PDFxotunredmailtopAinda não há avaliações
- Formulario Jun 2020Documento2 páginasFormulario Jun 2020Octávio AndradeAinda não há avaliações
- MAT0326 - Lista 1Documento7 páginasMAT0326 - Lista 1Lucas Lisboa LeãoAinda não há avaliações
- Oscilações 02 PDFDocumento31 páginasOscilações 02 PDFFabio AndreAinda não há avaliações
- Cinemática e Dinâmica Da RotaçãoDocumento6 páginasCinemática e Dinâmica Da RotaçãoBruna RolimAinda não há avaliações
- 2021-12-02T13 - 39 - 15.862Z - Lista 7Documento2 páginas2021-12-02T13 - 39 - 15.862Z - Lista 7TwAinda não há avaliações
- Teste 2 DinamicaDocumento2 páginasTeste 2 DinamicaCaio ZavarezziAinda não há avaliações
- Formulário Física 12Documento4 páginasFormulário Física 12Pedro ValverdeAinda não há avaliações
- Modulo3 Calorparte3 PDFDocumento20 páginasModulo3 Calorparte3 PDFDaniel NunesAinda não há avaliações
- 3 Aula Do Cap. 06: Atrito E Movimento CircularDocumento22 páginas3 Aula Do Cap. 06: Atrito E Movimento CircularfrechesAinda não há avaliações
- Frentes de Onda em R2 RemovedDocumento14 páginasFrentes de Onda em R2 Removedjoel.marquesdxAinda não há avaliações
- Prova2 s209Documento2 páginasProva2 s209FernandoAinda não há avaliações
- Exemplos Transformada de FourierDocumento17 páginasExemplos Transformada de FourierMuana BiavaAinda não há avaliações
- Aula 5 - SEM0317 - 2017Documento84 páginasAula 5 - SEM0317 - 2017Rubens Eduardo MeloAinda não há avaliações
- Ef12 Questao Aula 1 Resolucao PortoEditoraDocumento4 páginasEf12 Questao Aula 1 Resolucao PortoEditoraaninhafqAinda não há avaliações
- Formulário de Transcal 1Documento8 páginasFormulário de Transcal 1Ricardo CastelhanoAinda não há avaliações
- Cronograma de Estudos TRT 8 e TRT 10Documento1 páginaCronograma de Estudos TRT 8 e TRT 10geansomirandaAinda não há avaliações
- Processo Do Trabalho - PrincípiosDocumento5 páginasProcesso Do Trabalho - PrincípiosgeansomirandaAinda não há avaliações
- Simulado INSS - Técnico Do Seguro Social - 2012Documento15 páginasSimulado INSS - Técnico Do Seguro Social - 2012geansomirandaAinda não há avaliações
- Simulado 02 - Raciocínio Lógico - INSS (FCC) - Porcentagem.Documento6 páginasSimulado 02 - Raciocínio Lógico - INSS (FCC) - Porcentagem.geansomirandaAinda não há avaliações
- Simulado 01 - Raciocínio Lógico - INSS (FCC)Documento9 páginasSimulado 01 - Raciocínio Lógico - INSS (FCC)geansomirandaAinda não há avaliações
- Fontes Do Direito Do TrabalhoDocumento5 páginasFontes Do Direito Do TrabalhogeansomirandaAinda não há avaliações
- Alfa Simulado 20120130Documento14 páginasAlfa Simulado 20120130nilsonprofetecsAinda não há avaliações
- Salário MaternidadeDocumento7 páginasSalário MaternidadegeansomirandaAinda não há avaliações
- Crimes Contra A Seguridade SocialDocumento4 páginasCrimes Contra A Seguridade SocialgeansomirandaAinda não há avaliações
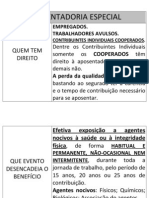
- Aposentadoria EspecialDocumento6 páginasAposentadoria EspecialgeansomirandaAinda não há avaliações
- Auxílio AcidenteDocumento5 páginasAuxílio AcidentegeansomirandaAinda não há avaliações
- Aposentadoria Por Tempo de ContribuiçãoDocumento6 páginasAposentadoria Por Tempo de ContribuiçãogeansomirandaAinda não há avaliações
- Aposentadoria Por IdadeDocumento6 páginasAposentadoria Por IdadegeansomirandaAinda não há avaliações
- Aposentadoria Por InvalidezDocumento9 páginasAposentadoria Por InvalidezgeansomirandaAinda não há avaliações
- Simulado - Prova ALVA FCCDocumento13 páginasSimulado - Prova ALVA FCCsidneihelpAinda não há avaliações
- Auxílio DoençaDocumento8 páginasAuxílio DoençageansomirandaAinda não há avaliações
- Simulado Inss Técnico Do Seguro SocialDocumento31 páginasSimulado Inss Técnico Do Seguro Socialgeansomiranda100% (1)
- Competencias INSS e RFBDocumento5 páginasCompetencias INSS e RFBgeansomirandaAinda não há avaliações
- Da Nao Recepcao Da Sumula 339 PDFDocumento13 páginasDa Nao Recepcao Da Sumula 339 PDFRoberto SammyAinda não há avaliações
- Direito Administrativo Anotado InSS FCCDocumento55 páginasDireito Administrativo Anotado InSS FCCgeansomirandaAinda não há avaliações
- Simulado - Prova ALVA FCCDocumento13 páginasSimulado - Prova ALVA FCCsidneihelpAinda não há avaliações
- Simulado Prova INSSDocumento1 páginaSimulado Prova INSSgeansomirandaAinda não há avaliações
- Isonomia Vencimentos Luz ConstituicaoDocumento4 páginasIsonomia Vencimentos Luz ConstituicaogeansomirandaAinda não há avaliações
- MANUAL DE INSTRUCAO CTSI Caminhao Transbordo Santa IzabelDocumento16 páginasMANUAL DE INSTRUCAO CTSI Caminhao Transbordo Santa IzabelZeka Borgato0% (1)
- Basse PoliesterDocumento3 páginasBasse PoliesterpaulinosancjarojasAinda não há avaliações
- Principais Instrumento Bromatologia 5Documento13 páginasPrincipais Instrumento Bromatologia 5Gabriela Verissimo GabyAinda não há avaliações
- Avaliação Semanal III e IVDocumento8 páginasAvaliação Semanal III e IVMarcos LimaAinda não há avaliações
- Química Orgânica 32708Documento11 páginasQuímica Orgânica 32708Mirelly FerreiraAinda não há avaliações
- Astroquimica Aula-3Documento64 páginasAstroquimica Aula-3RobsonCorrêaAinda não há avaliações
- EJ - RESUMO NAV PP PlanejamentoDocumento5 páginasEJ - RESUMO NAV PP PlanejamentoFabio Sant Ana de OliveiraAinda não há avaliações
- Lista 3 - TDQDocumento4 páginasLista 3 - TDQGiPetlaAinda não há avaliações
- 2-Termino Simbologia1Documento18 páginas2-Termino Simbologia1abneryeshuaAinda não há avaliações
- Catalogo - Alumbra (Iluminação)Documento24 páginasCatalogo - Alumbra (Iluminação)Sergio SSNAinda não há avaliações
- 2013 ESCAVADEIRA HIDRAULICA JCB JS130LC 1108-FE015 Folheto Tecnico JS130LC - Janeiro - 2013Documento8 páginas2013 ESCAVADEIRA HIDRAULICA JCB JS130LC 1108-FE015 Folheto Tecnico JS130LC - Janeiro - 2013Cassius BenitesAinda não há avaliações
- O Projeto Secreto de Einstein - Vitor Alexandre Chnee PDFDocumento231 páginasO Projeto Secreto de Einstein - Vitor Alexandre Chnee PDFjdjm1Ainda não há avaliações
- Apostila Eletrotécnica. e Acionamentos - ResistoresDocumento17 páginasApostila Eletrotécnica. e Acionamentos - Resistoresvictor hugoAinda não há avaliações
- 04 - CalorimetriaDocumento36 páginas04 - CalorimetriaAndré do freeAinda não há avaliações
- Bantam Serralheiro 110220 VDocumento16 páginasBantam Serralheiro 110220 VDiegoAinda não há avaliações
- Avaliação D2Documento5 páginasAvaliação D2bersilveira8645Ainda não há avaliações
- Lista 1 MGT 2020 2Documento4 páginasLista 1 MGT 2020 2Ueverton FreireAinda não há avaliações
- Aula05 Remoto ExercíciosDocumento4 páginasAula05 Remoto ExercíciosEmerson MatheusAinda não há avaliações
- Relatório Completo 2Documento12 páginasRelatório Completo 2Camila Sciena100% (1)
- Ficha de PreparacaoDocumento5 páginasFicha de PreparacaoNelson0% (1)
- Datasheet Inversor Goodwe Ms 5000wDocumento1 páginaDatasheet Inversor Goodwe Ms 5000wAmanda AlvesAinda não há avaliações
- OscilacoesDocumento9 páginasOscilacoesCarlos MugabeAinda não há avaliações
- 1700 Questões - Parte 2 PDFDocumento594 páginas1700 Questões - Parte 2 PDFWendel MeloAinda não há avaliações
- Nota de Aula 2Documento10 páginasNota de Aula 2Isak XavierAinda não há avaliações
- Descrição de Itens Vig Ambiental CorrigidaDocumento6 páginasDescrição de Itens Vig Ambiental CorrigidaAlbert HenriqueAinda não há avaliações
- Aocp 2014Documento11 páginasAocp 2014Gustavo CostaAinda não há avaliações
- Laboratório de AED-01 - 03 - Pré-Lab 01 - Experimento de Reynolds-Perda de Carga-Instabilidade de Rayleigh-TaylorDocumento27 páginasLaboratório de AED-01 - 03 - Pré-Lab 01 - Experimento de Reynolds-Perda de Carga-Instabilidade de Rayleigh-TaylorFernando Antonio dos Santos DinizAinda não há avaliações